ROS Intermidiate (Navigation) Workshop in Nagoya 名古屋にてROSワークショップ中級・自律移動編を開催しました
We had the intermidiate ROS workshop on navigation at Meijo University, Nagoya, Aichi. They learned the navigation features of ROS using simulation and a real robot named “Roomblock”, Roomba based robot. Mapping, localization, control are
Thanks everyone, and well done!!
前回の初級編に続き,名古屋市の名城大学メカトロニクス工学科で,プライベートROSワークショップ中級・自律移動編を開催しました.この自律移動編は今年度から新しく始まったもので,初めての開催となります.
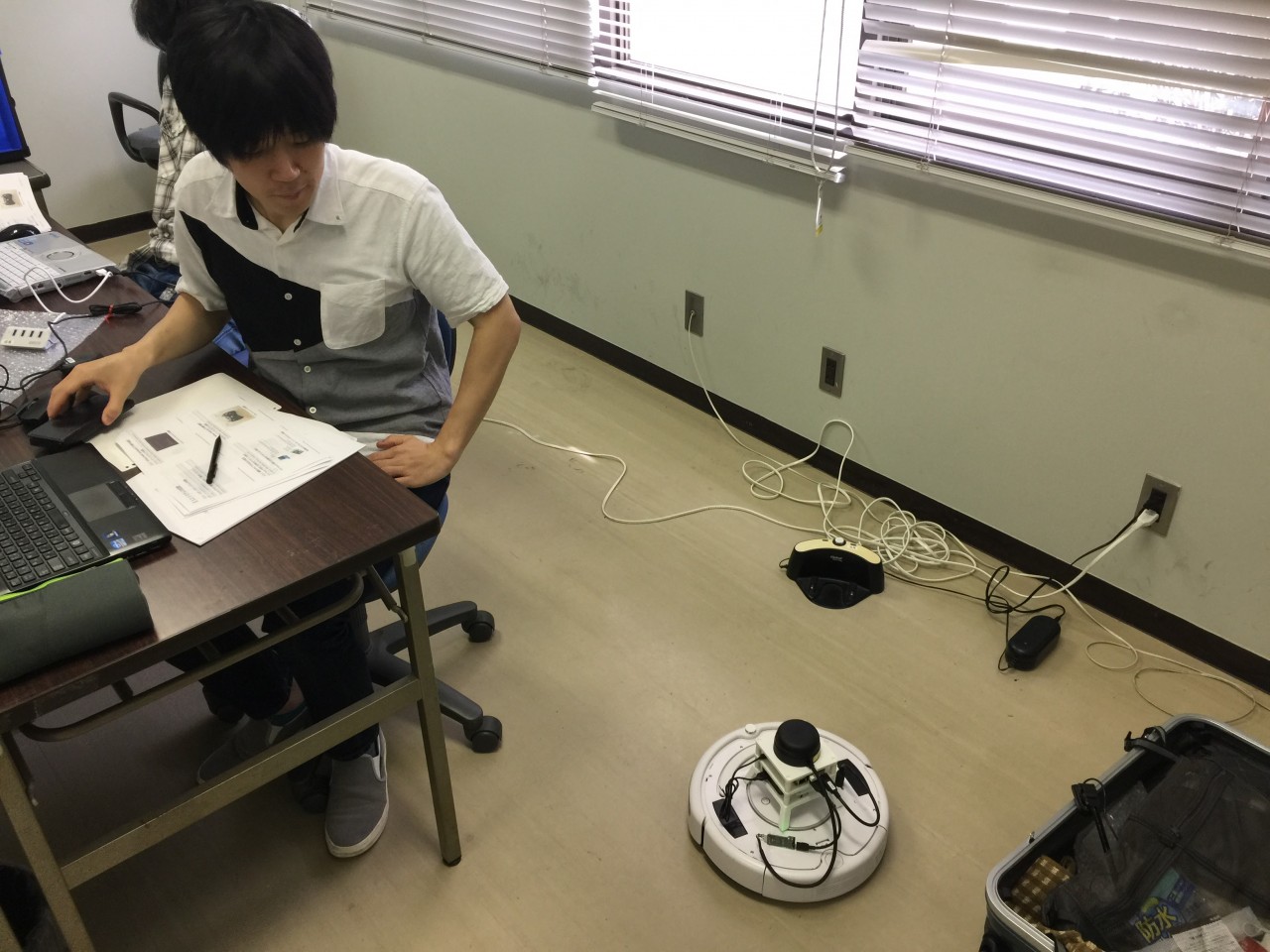
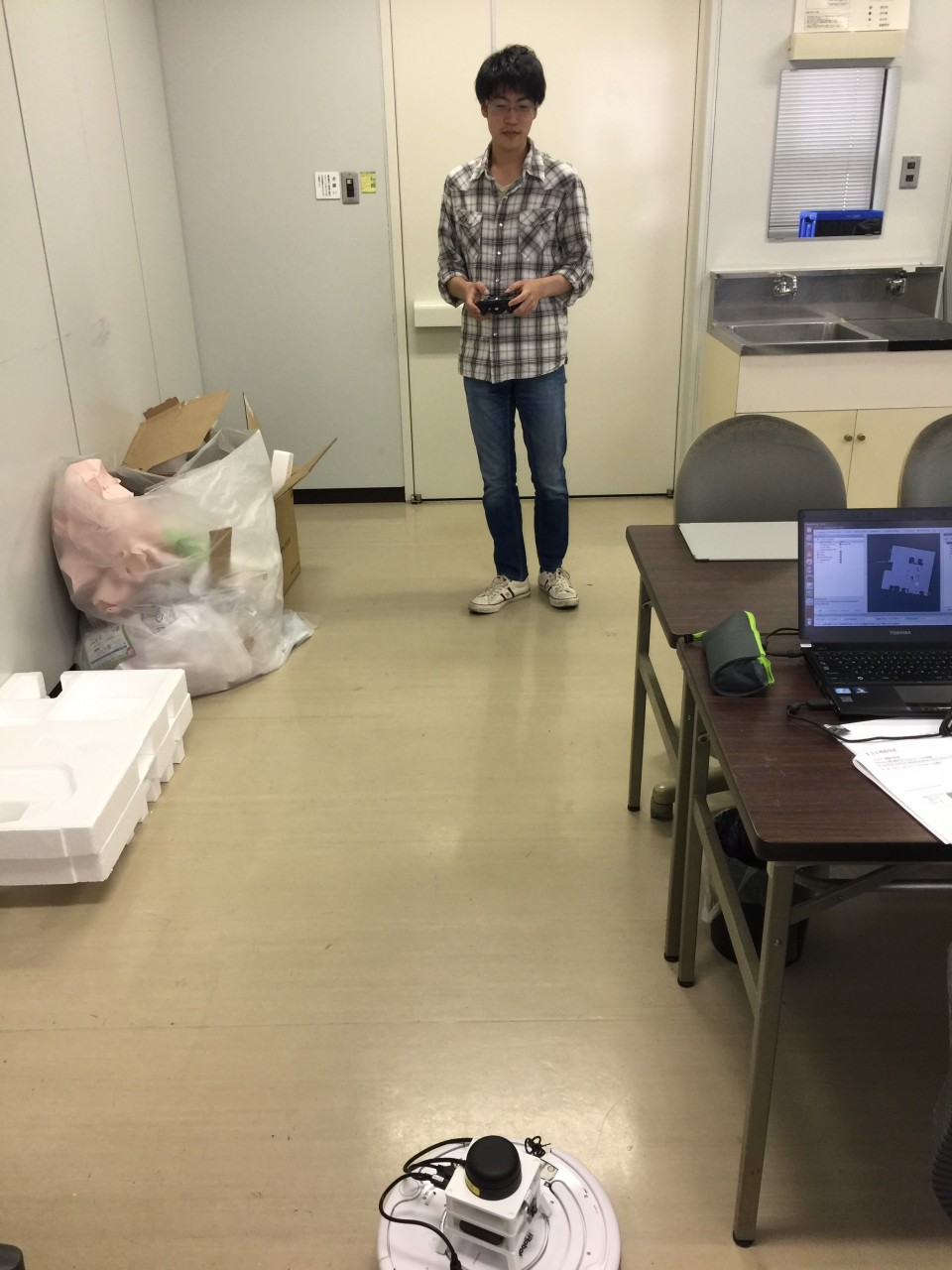
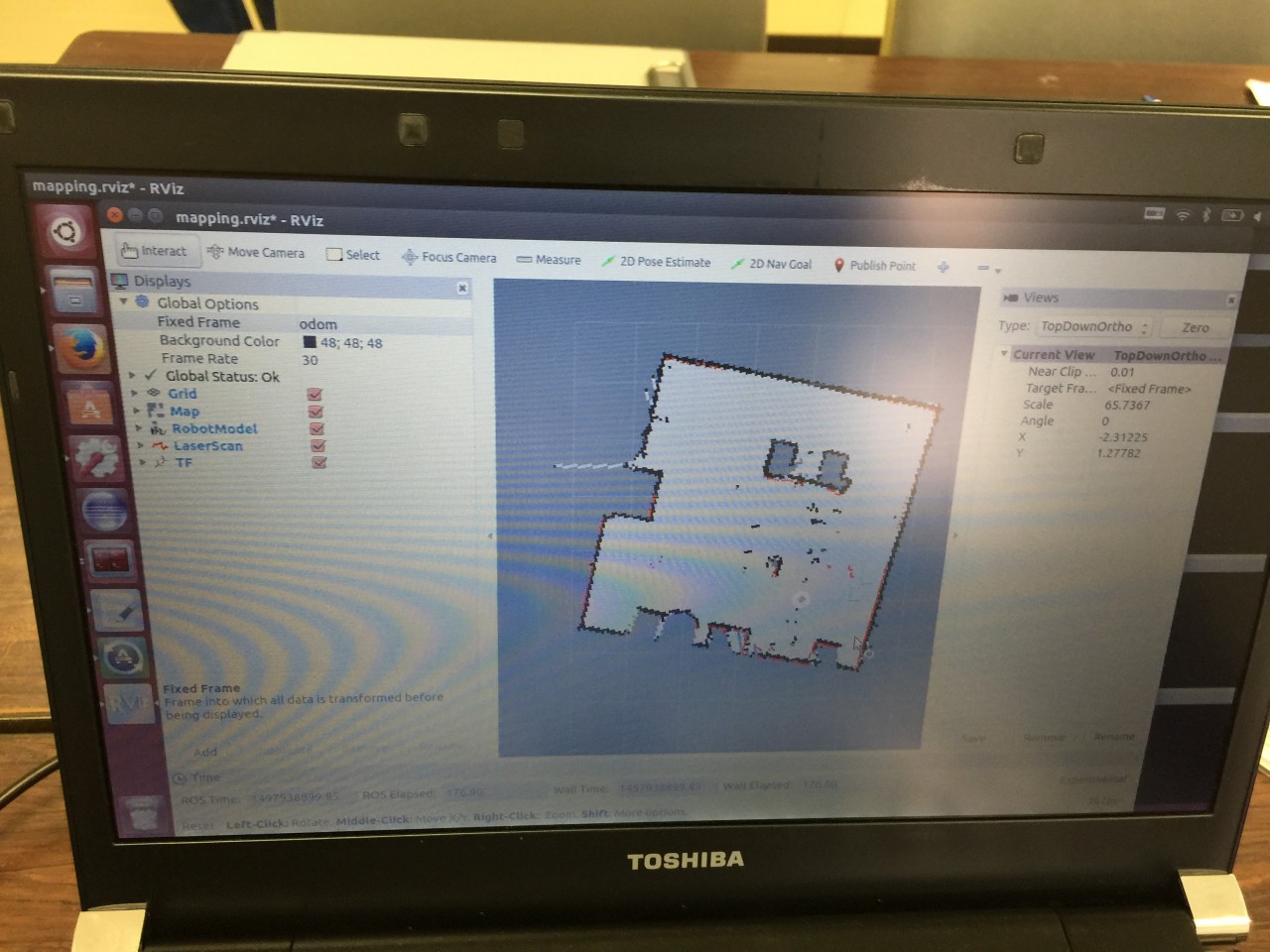
中級・自律移動編では,まずシミュレータを用いた自律移動技術のハンズオンを行います.つぎに,iRobot社の掃除ロボット,ルンバをベースにした自律移動ロボット”Roomblock”を用いて実際に地図生成と自律移動を行います.”Roomblock”はラズベリーパイとLIDAR(レーザ距離スキャナ)を備えた立派な自律移動ロボットで,部屋の地図を作り,目的地を設定してそこに移動することができます.最後に,ROSの自律移動機能の解説(全体の構成,関連するtopic, move_baseの仕組みなど)を受け,ハンズオンで出てくる疑問点を解消していきます.
車輪移動ロボットの操作方法,地図の生成,自律移動を実際にやってみることで,自律移動技術の理解がより深まるものと思います.参加者の皆様方,お疲れ様でした.今後の研究開発の一助となれば幸いです.
このように,TORKでは企業や大学でのプライベートワークショップのご依頼も承っております.また,本年からは中部地区での開催を増やしていこうと考えています.お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp

Ryosuke Tajima administrator
著者について