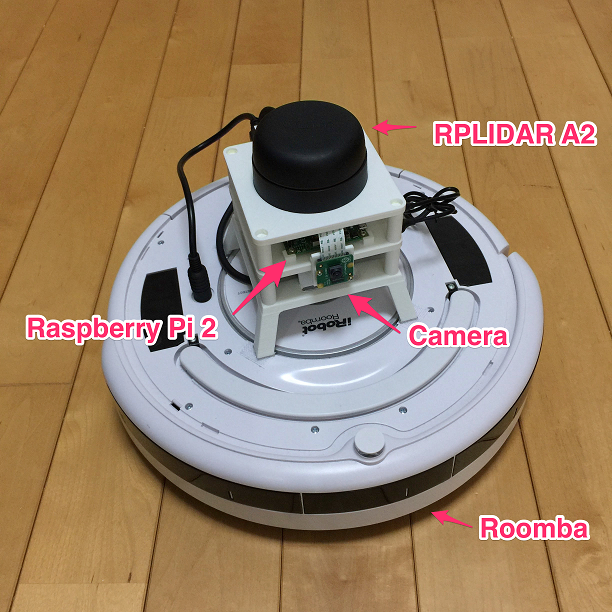
ルンバとラズベリーパイとレーザ距離センサによる自律移動ロボット Roomblock(3)
前回はルンバと通信するためのROIコネクタについて紹介しました.今回はルンバと通信するための計算機として用いている,ラズベリーパイ(Raspberry Pi)について書きます.
ラズベリーパイについては改めて言うまでもないかもしれませんが,低価格なARM搭載のボードコンピュータです.Roomblockで用いているのはラズベリーパイ2です.通常のPCと同じように,Ubuntuをインストールしたあと,ROSをインストールすることができます.

Raspberry Pi 2
ルンバのROIコネクタとラズベリーパイは,USB-シリアル変換器を使って接続します.変換器を内蔵したケーブル(秋月電子で購入できます)を使うと,ミニDINコネクタとはんだ付けするだけで写真のようなケーブルが出来上がります.Roomblockで唯一のはんだ付けが必要な部品ですが,3,4箇所をはんだ付けするだけなのでそれほど難しくないと思います.
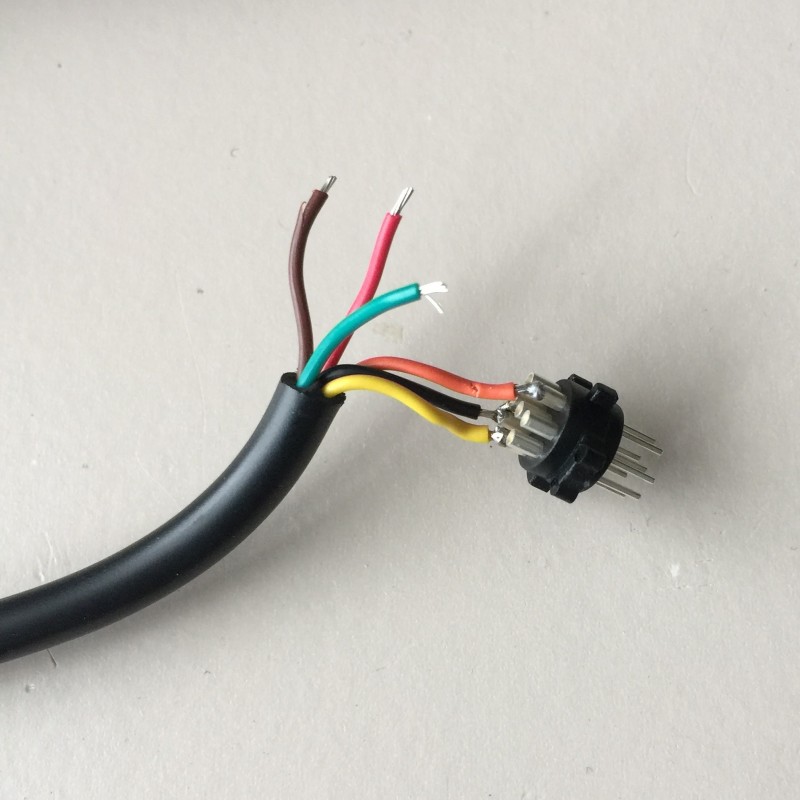

USB-シリアル変換ケーブル
ラズベリーパイの電源はどうしましょうか?ルンバのROIポートにも電源が出ているのですが,これはルンバのバッテリの電圧がそのまま出ているので,使う場合には電圧の変換が必要になってしまいます.Roomblockでは市販のUSBモバイルバッテリーを別電源として使用することにしました.10000mAのものが3000円程度で購入できる,良い時代になりました…これでラズベリーパイを数時間は動作させることができます.

今回はここまでです.次はレーザースキャナについて紹介します.
Roomblockの詳細な作り方については,Instructablesで公開しています.ただし当社は,これらの内容によって生じるいかなる損害についても責任を負いません.興味がわいた方はあくまで自己責任で,チャレンジしてくださいね.
Ryosuke Tajima administrator
著者について