Since our debut in 2013, we’ve had a blessed period to hear so many questions, opinions regarding opensource robotics.
-
- To even better respond to the needs, we introduce a new “Consulting Ticket” service:
- A single ticket is worth a half or a full day of work at maximum
- Within two business day the initial response will be made. We aim to solve within four business days
- Question examples:
- What to do in the first place to use ROS?
- Guide me to implement the robotics task X using opensource libraries
- Help us! I can’t build our custom package
- How to convert our robot’s 3D model to make it compatible with Gazebo?
- OSS robotics development on contract basis:
- Tamagawa University’s omni-directional mobile base “SPUR” ROS-based control package
- Toyota’s welfare robot “HSR” hackathon environment Gazebo package

-
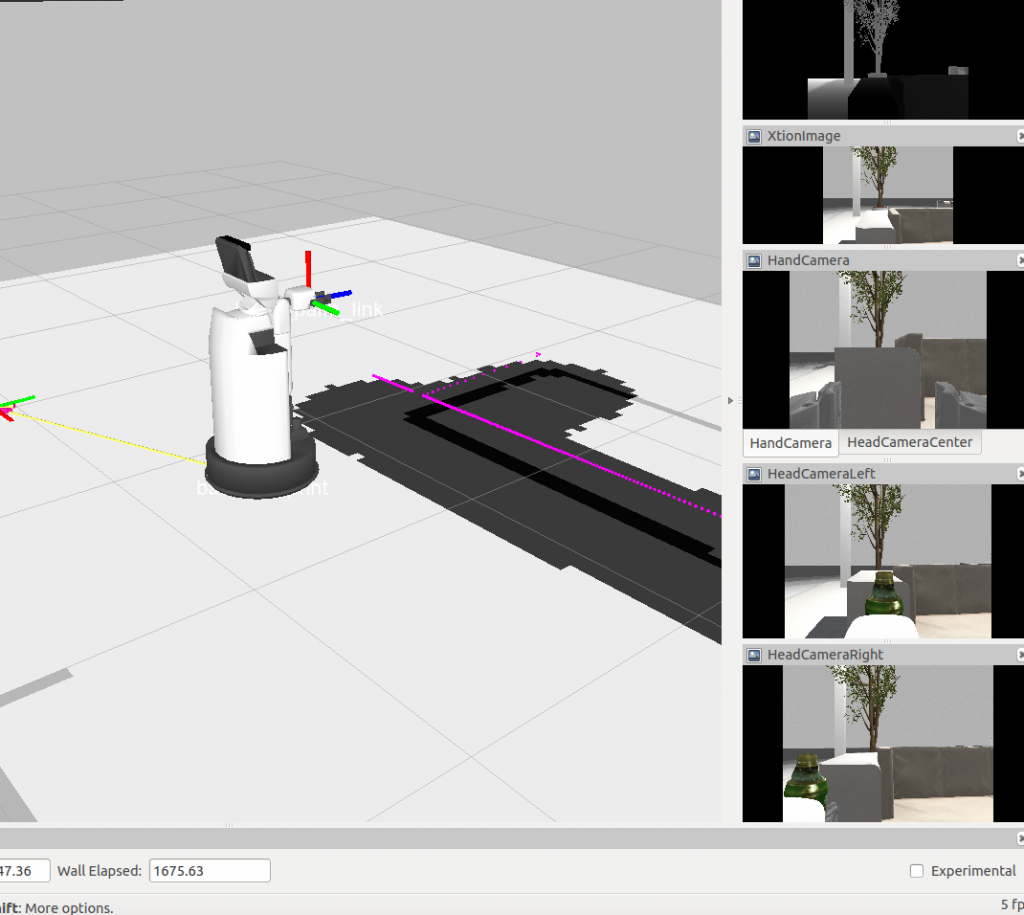
- Scene from
Toyota HSR Hackathon 2015 images
- . Left: Gazebo simulator, Right: same scene on RViz visualizer.
-
- Hakuto Project (Google Lunar-X contender) Gazebo simulation (including WEB interface)
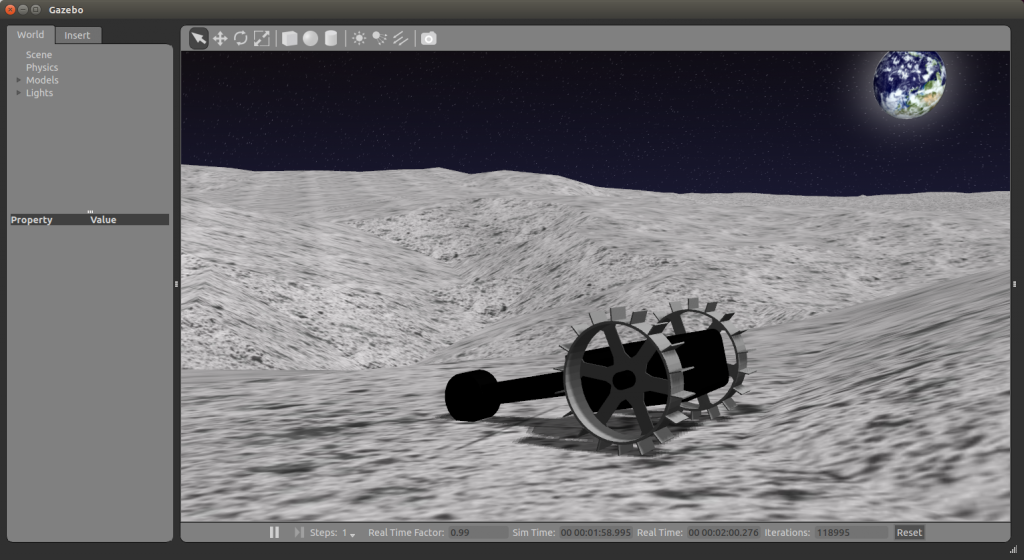

- Left: Linux desktop version, Right: web browser version.
- To even better respond to the needs, we introduce a new “Consulting Ticket” service: