TORK at Toyota HSR (Personal Robot) Hackathon 2015TORK は今年も HSR ハッカソンをサポートします!
It’s been almost an year since TORK worked with Toyota Motors Corporation to co-host their inaugural hackathon for their HSR personal robot. We’re pleased to work with the company and the new version of their HSR robot again from August 31th through Septermber 2th at Megaweb show room in Tokyo (link). Selected participants already have an access to the robot’s Gazebo simulation packages and they should be getting ready, so are we!
The competition sight is right in the middle of Toyota’s showroom in Odaiba water front, and will be open to public. Come see the moment!
昨年度大好評をえた第一回ハッカソンに引き続き8月31日から9月2日までお台場の Megaweb で開催されるトヨタ自動車様の「HSR ハッカソン2015」をお手伝いさせて頂いています.すでに参加チームには Gazebo シミュレータが事前配布されているということで, 各チームの準備状況が気になりますね.TORK チームも連日使い込んでいます.またロボットは昨年度のものからバージョンアップした新型 HSR.
なお当日会場は一般公開しているのでご都合宜しい方は応援に来られてはいかがでしょうか.
楽しみです!
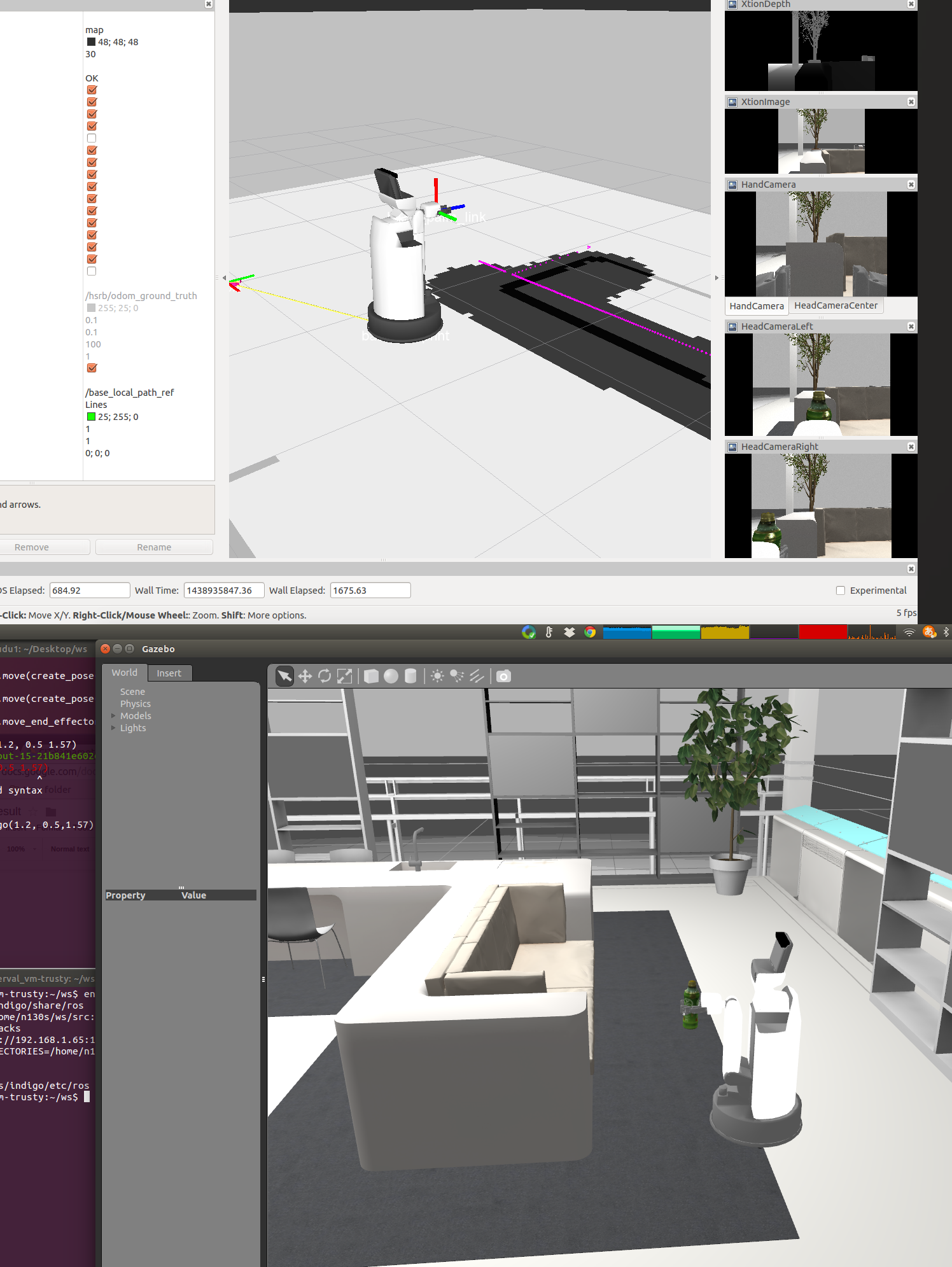
HSR on Gazebo simulator and ROS RViz visualizer.
ROS-Baxter workshop at 33-rd Annual Conference of the RSJ 2015 (Sep 4)2015年ロボット学会学術講演会内で双腕ロボットのワークショップ開催 (9月4日)
Workshop details
- Purpose: Brief introductory course for the Rethink Robotics’s Baxter Research Robot (for research), which came out in 2012 targeting mid-small class businesses while achieving low-price and revolutionary safety. Participants will experience the state-of-the-art mechanism and operational interface of the robot, as well as the high-end features such as motion planning and perception based on software programming gateway called ROS, a defacto standard framework for research-oriented robots.
- Title: ROS Basic Workshop w/industrial dual-arm Baxter robot
- Host: TORK (Tokyo Opensource Robotics Kyokai Association)
- Assent: Nihon Binary Co., Ltd. (official supplier of this robot in Japan)
- Date: See “Schedule” section at the bottom of this page
- Venue: 1st building 1F, Centennial hall at Tokyo Denki University
- Fee: Free
- Workshop language: Japanese (sorry! But if there’s an interest for English, please contact us. We’ve managed sessions where non-Japanese speakers were present)
- Curriculum
- Introduction to Baxter robot & ROS
- Motion planning by MoveIt!
- Perception and action planning
- Gazebo simulation usage with Baxter
- Items to bring
- Laptop computer
- NOT required. Limited number of desktop machines are available. In fact pair-work if you’re coming with your colleague is recommended for better learning.
- Intel i5 or above, RAM 4G or above, storage 7G or above, internet connectivity (ethernet or wifi)
- We ask you to disable any intra-organizational network setting (e.g. Proxy) and make sure your machine can connect to the internet without them. These things are known to cause issues that might end up affect the workshop progress.
- Ubuntu 14.04・ROS Indigo installed. See installation tutorial. (Hydro or any other ROS distro is not recommended in our workshop.
- Laptop computer
Resource
- We, TORK, offers workshop for ROS, which is a crucial part of utilizing BRR. Go to this page for more info.
当社はこれまでオープンソースソフトウェアの ROS を用いてロボットを扱いたい,という様々な需要に応えるべく,複数のタイプのワークショップを開催してきました.産業用双腕ロボット Baxter を用いたワークショップは,日本代理店の日本バイナリー社様のご協賛の下,同社オフィスでこれまで行ってまいりましたが,今回は9月の日本ロボット学会学術講演会内で開催する運びとなりました.
今回は,学会内ということもあり,機能性のご紹介を差し上げる軽めの場となっております.
Baxter の日本公式販売代理店の日本バイナリー様ならびに,製造元である米・Rethink Robotics 社様のご厚意により,通常ロボットを購入しないと入手できない Baxter Research Robot のシミュレータの入手権を,参加頂いた方にはお渡しします.
事前申込不要 (参加者が多い場合の不都合はご容赦下さい)
- 日時:9/4/2015 (金) 12:30-14:30
- 場所:東京電機大学 東京千住キャンパス1号館1階100周年ホール(中) (ロボット学会学術講演会内)
- 協賛:日本バイナリー株式会社
- 費用:無償
- 対象
- Baxter Robot の特徴について知りたい方
- ROS を用いた Baxter Research Robot の可能性にご興味がおありの方
- Baxter Research Robot ユーザ
- 内容 (予定)
- Baxter ロボット/ROS 概要の紹介
- ロボットプログラミング例・ハンズオン
- MoveIt! 動作計画プログラミング
- 視覚認識と行動生成プログラミング
- Gazebo による Baxter シミュレータ利用法
- Baxter Research Robot ユーザ様によるライト・トーク (あれば)
- ご持参頂きたい物
- 特になし
- Ubuntu 14.04 + ROS Indigo インストール済のコンピュータご持参の方は,Baxter に接続して動作を体験頂けます (virtual machine は一部のツールの動作が不安定のため推奨しません)

お問合せ:info[a t]opensource-robotics.tokyo.jp
当社が行っている通常版 ROS-Baxter のワークショップページもご参考までにご覧下さい.
NEXTAGE OPEN ソフトウェア向けサービスの進展
2015年8月8日,おかげさまで TORK は設立2年を迎えることができました.これからも,お客様のご要望に応え,産業・学術界でのオープンソースロボティクスの進展に寄与できるよう,より一層努力して参ります.
設立以来実施してきた事業の一つである NEXTAGE OPEN ロボットの ROS 版オープンソースソフトウェアのインストールサービスも,順調にサービスをご提供してきております.製造元である川田工業様・カワダロボティクス様をはじめ,NEXTAGE OEPN / Hironx のオープンソース環境の維持と発展にご協力頂いている方々に感謝します.
また,ソフトウェア・サポートサービスを購入頂いたお客様方からは,開始した2014年1月以降,合計で74件のサポートリクエストを頂きました.当社はご質問にお応えするほか,時にはオープンソース・コミュニティと協力してソフトウェアの不具合修復/機能追加を行うなどして,お客様の開発活動をご支援してまいりました.
-
- NEXTAGE OPEN ユーザ様事例:
-
- Tecnalia 社 (スペイン) は,航空機製造大手の Airbus 社向けの工場自動化に取り組んでいます.多様化する製造内容への迅速な対応,人が行う作業との協調による効率化などの要件に対応する策としてオープンソースである ROS・hrpsys 搭載の NEXTAGE OPEN を選択されており,その成果は学術誌[1]で報告されています.
ROS が使える双腕協働ロボット NEXTAGE OPEN の今後も引き続きよろしくお願いいたします.

(写真は第四回 ROS 勉強会より.実機の要らないシミュレーションを提供していることもあり,勉強会参加者等こういったロボットプログラミング,ROS 等に興味をお持ちの方にも気軽に使って頂けるようになっています)
ROS workshop intermediate (manipulation) in July was again a successROS ワークショップ中級・マニピュレーション編を開催しました
今回も湯島のミーティングスペースにてROSワークショップ中級・マニピュレーション編を開催しました!参加者の皆様の勢いに講師が終始圧倒されておりました.中級編は手を動かすことが多くて大変ですが無事終わりました.お疲れ様でした!

ROS Workshop seats available (introductory and intermediate-manipulation) (Jul, 2015)ROS Workshop 初級・中級マニピュレーション編が急遽開催決定 (2015年7月)
企業向け ROS ワークショップシリーズ,2015年7月28水,29木に急遽開催を決定しました (もう来週ですね)
各セミナーのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.
“ワークショップ” とは別に,理論や現状などを知りたいという方々向けの所謂”セミナー”の開催も検討しています.ご意見頂ければ幸いです.info[a-t]opensource-robotics.tokyo.jp
A few ROS Workshop courses will be held in next week by TORK in Tokyo, Japan. Any inquiry is appreciated at info[a-t]opensource-robotics.tokyo.jp
TORK on newly published Nikkei Robotics magazines日経ロボティクス誌で ROS 連載させて頂いています
Nikkei BP, a leading business newspaper and magazine media company, celebrated its inaugural publishment of monthly magazine “Nikkei Robotics” in July 2015. Our co-founder Isaac contributes series of articles about ROS (Robot Operating System).
With a rising need and interest toward robotics solution in global economy, we’ve seen recently the amount of technical information about opensource robotics in Japanese has increased a great bit. With the magazine articles this time, we aim to inrtoduce the status quo of what’s going on in opensource robotics and how big the impact the opensource technology is giving to the robotics development, especially in the large scale projects, so that corporate readers can hopefully get some idea of how they can integrate opensource into their robotics product development.
Although the article is only in Japanese as far as we know, we appreciate any feedback, requests about this (info[a–t]opensource-robotics.tokyo.jp). You can make a purchase request from Nikkei BP’s official web site from the link above.
日経 BP 社より今月創刊された月刊誌”日経ロボティクス“の中で,理事・斉藤が ROS (Robot Operating System) を紹介する記事を書かせて頂いています.
昨今のロボットブームのおかげもあってか,オープンソースロボティクスの日本語の情報,とりわけまず使ってみるといった技術情報が飛躍的に充実したように感じます.今回の記事では,技術的な話も抑えつつ,日本・世界の企業や大学等様々な場所で起きているオープンソースロボティクス活動のインパクトを紹介し,企業内プロジェクトへのオープンソースロボティクス採用検討のために有益となる情報を提供することを目指しています.
ご感想や今後の記事への御要望等をお聞かせ願えれば幸いです (info[a–t]opensource-robotics.tokyo.jp).購入ご希望等日経ロボティクス誌に関するお問合せは上記の同誌リンクから行って下さるようお願い致します.
講演のお知らせ;ロボット工学セミナー第94回 ロボット用オープンソースソフトウェアとその実用例 (2015/09/11)
(社) 日本ロボット学会主催の標題のセミナーに,当協会理事の東京大学・岡田准教授と,斉藤が登壇します.以下,セミナー WEB サイト[日本ロボット学会トップページへ移動します]から一部転載させて頂きます.事前申込により遠隔受講も可能とのことです.
- 開催日:2015年9月11日(金)9:50~16:40(開場9:20)
- 遠隔セミナー:本セミナーの有料ネット配信を行います.参加者募集開始は8月上旬の予定です.
- 開催地:中央大学 後楽園キャンパス 5号館5134室 (東京都文京区春日1-13-27)
- 口上:近年ロボット向けオープンソースソフトウェアの利用が拡大しつつあり,代表的なものに海外にて急速にユーザを増やしているROS などがあります.本セミナーでは,ロボット向けオープンソースソフトウェアの開発やその応用において第一線で活用されている方々を講師にお招きし,ソフトウエアの概要から製品に活用する上での具体的な運用方法まで実例を交えてわかりやすく解説いただきます.
- 講演者 (一部)
- 10:00-11:00 第1話 ロボット研究用オープンソースソフトウェアの動向と今後の可能性 東京大学 岡田慧
- 11:10-12:10 第2話 ROSの活用による屋外の歩行者空間に適応した自律移動ロボットの開発 千葉工業大学 原 祥尭
- 13:10-14:10 第3話 ヒト型ロボット研究プラットフォームの開発 カワダロボティクス(株) 長嶋 功一
- 14:20-15:20 第4話 ロボット開発用オープンソースソフトウェアの企業活用支援と今後の展望 (一社) 東京オープンソースロボティクス協会 齋藤功
- 15:30-16:30 第5話 トヨタパートナーロボットの取り組み トヨタ自動車(株) 山内 実
お申込は日本ロボット学会の WEB サイトから可能となっています (リンク)[日本ロボット学会トップページへ移動します].
Opensource を積極的に活用してビジネスに繋げている・成果を挙げている他の講演者様をはじめとして,交流できることを楽しみにしております.
ROS support period until 20202020年までの ROS のバージョンごとのサポート期間
ROS の利用を検討されている企業の方が一様に気にされるのが,サポート期間です.
というのも,つい最近まで ROS は1年間に2度も新バージョンをリリースしていました.開発者からすると,安定性の不透明な新バージョンにしょっちゅう更新するわけにはいかない,というのが不安の第一の理由だと思います.また,遅ればせながらやっとバージョンを更新して慣れてきたばかりなのにもう次のバージョンが出て,世間の話題はすっかり新バージョンに移ってしまった,という精神的フラストレーションは意外に無視できないのではないでしょうか.このような不安は企業/大学その他,どこの方にも共通ですね.
これら多くの声を元に,2014年の ROS Indigo からは LTS (Long Term Support) という考えが導入されました.
- ROS 初の LTS である Indigo は,2019年までサポートされることが発表されています (Ubuntu 14.04 のサポート期間に準ずる)
- 次の ROS LTS は2016年リリース予定の “Kinetic Kame” (“運動的な亀”?まあ,素直にキネティック亀と呼びましょうか) で,同様に2021年まで.Ubuntu は16.04中心で,14.04は未対応と思われる
- その次は2018年の M-Turtle (名称未定) が2023年までサポートされると予想されます
では,Indigo が2019年までサポートされるのであれば,今から4年間も同一の Ubuntu・ROS バージョンを使い続けられるのかというと,実際は時が経つにつれて機能性等不満が出てくる場合もあると思われるため,用途によって様子見になるのではないでしょうか.特に,LTS は2年間隔でリリースされることになっているようなので,Indigo の次の LTS であるキネティック亀に,2019年を待たずに乗り換えるというケースは考えられます.
それにしても,日本のロボティクス的には大きなマイルストーンでありそうな2020年には,キネ亀あるいは M-Turtle のいづれかを使うことになるのかも知れないですね.
M で始まるカメといえば,国民的アイドルの緑色のお方でしょうか!

“ROS Midorigame Turtle” 実現が待ち遠しいですね!
参考:ROS リリースタイムライン http://wiki.ros.org/Distributions/Timeline
我々がメンテナンスに関わっている NEXTAGE OPEN のオープンソースソフトは,これに合わせて,今後 Indigo を LTS としてはどうか,という議論になっています.ご意見を是非メイリングリスト等でお聞かせ下さい.
What industry users have asked us about ROS particularly is how long certain ROS version (called “distro”) will be supported.
That’s no wonder because ROS used to make 2 releases within an year until recently. Apparently developers worry the unstability that new version of any kind of software induces initially. In addition, there’s an implicit anxiety where you for example finally updated to the latest version but then even newer version is just released and you’re already out of sync from the community. This is common for wherever you work, industry, academia or hobby etc.
Based on the demand ROS implemented LTS (Long Term Support) concept starting from Indigo in 2014. The future LTS period will be:
- Indigo, ROS’ inaugural LTS release, will be supported until 2019
- Next up is “Kinetic Kame” that’s coming in 2016 will be expected to be alive until 2021 (no official announcement about this period tactics thus far though)
- ROS M-Turtle will be released in 2018 and maintained until 2023
Okay, so we can keep using Indigo until 2019. Sounds like still a long way to go. But in actuality will everyone be happy to be on board on the same OS and ROS for another 4 years, is questionable. In fact ROS LTS is 2-year interval, so switching to the next LTS while the oldest valid LTS is still supported will probably an option depending on your needs.
Well, anyways, there seems to be a huge milestone on 2020 for roboticists in Japan with the Summer Olympic Games in Tokyo. Are people going to use ROS Kinetic or ROS M-Turtle then?
With ROS K-turtle, Japanese language speakers feel like triumphed on getting “Kame” (turtle in their language) in its code name. But with M, there’s even a pet of all-time in Japan that the name starts from m. Midori-game!

No one can’t wait for “ROS Midorigame Turtle”, can we?
Ref. ROS release timeline http://wiki.ros.org/Distributions/Timeline
Back to the immediate concern, there’s a discussion for open controller of NEXTAGE OPEN that we’re maintaining about the versioning and the length of support. Please let us hear your thoughts in the discussion.
OSS in DRC Final 2015DARPA Robotics Challenge でのオープンソース活用状況
During more than 30 workshop and seminars we’ve held since the Summer 2014, we are delighted to have talked to many engineers/managers (mostly from Japanese large companies) who’re interested in applying opensource software technologies to their development. Among other things, one of the most keen questions is how opensource software, particularly ROS, is going to be put into the “real/large systems”.
Seeking a hint, Isaac visited DARPA Robotics Challenge Final (DRC) in Pomona, CA., to see the evolution and the extent of opensource technologies in the very large scale robotics projects (he didn’t forget to cheer 3 teams from JSK lab our board member Kei Okada leads!).
There he was able to talk to managers from OSRF and asked how they view actual usage of ROS and Gazebo simulator in the competition, which the answer was later revealed on their blog stating that out of 23 teams, 18 used ROS and 14 used Gazebo. In addition, our own research brings out that 3 teams used OpenRTM via ROS and 1build their system on OpenRTM.
All robots from 24 teams must be very complexed system without exception; not just the transformer robots that a few most successful teams such as KAIST, CMU, JPL. Combined with the pressure to get the award and the amount of the resource spent, failures due to the system error should have not been an option for any team. Seeing the fact that the opensource technologies were employed for such a mission critical system’s control and operation is the most encouraging.
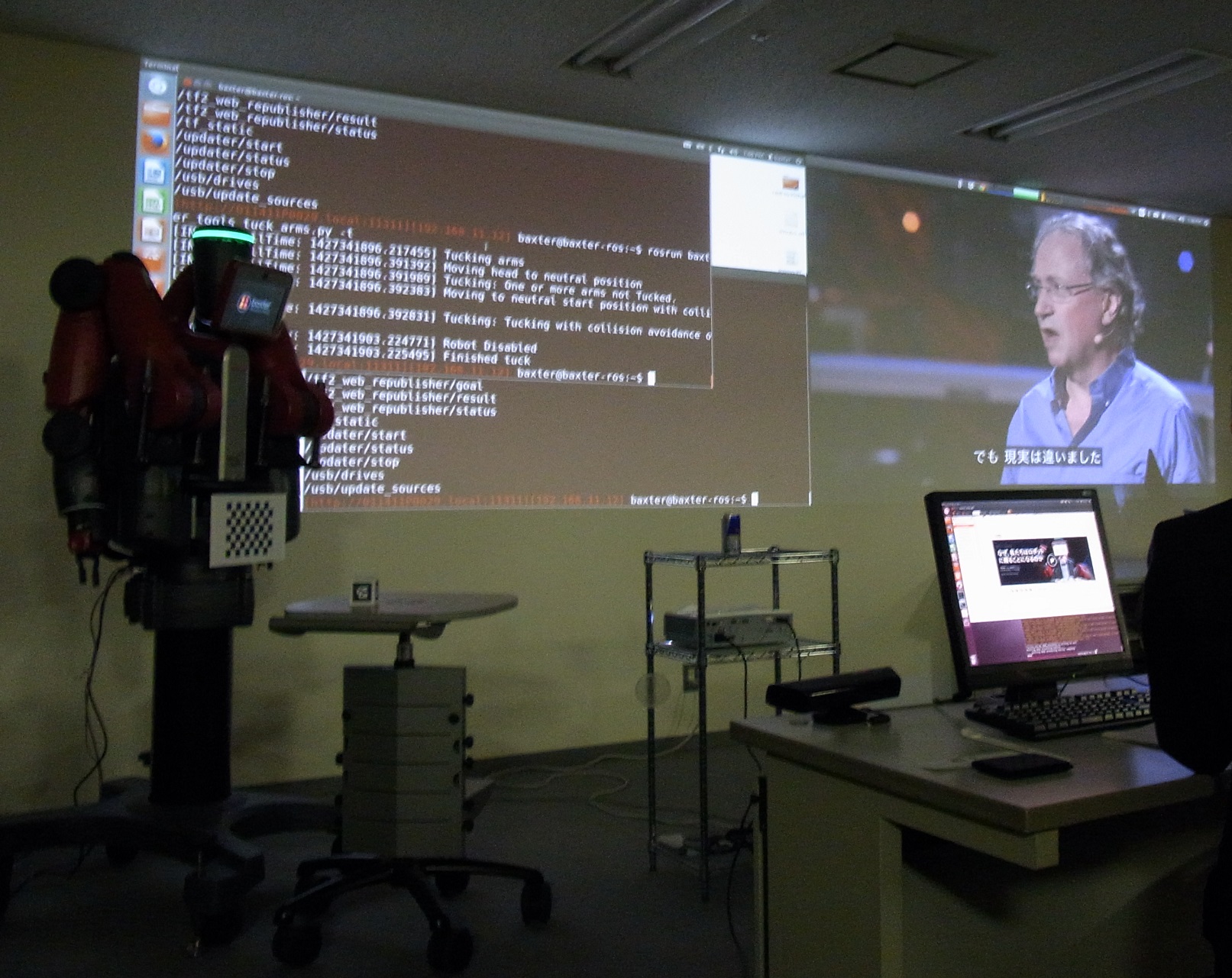
[Appendix] Interesting screenshot/movie is shared here…IHMC made their garage even theatrical to set a monitor at the entrance of their garage that played operation display. Operator is probably trying to match the location of the grasp target object while looking at the actual pose by seeing both camera and sensor output, and send the command. Despite the sparsely received pointcloud data (once in 30 seconds?) due to the hypothetical disaster network condition, the operator’s work looks very effective.
2014年夏から開始した ROS セミナー/ワークショップシリーズは,お陰様でこれまで30回以上開催し,多くの企業/研究者様と意見交換をさせて頂いております.その会話の中で必ずと行って良いほど話題に上がるのは,オープンソース技術,とりわけ ROS は今後実システムに使われるようになっていくのかということです.ロボット開発用ソフトウェアのデファクトスタンダードという言い方をされる (Wired 誌) こともある ROS ですが,実際は用途は研究に限られ,大規模プロジェクトや製品,産業用途としての取組は徐々に本格化しつつある段階というのが大方の見解ではないかと思います.
折しも今年の5・6月は世界的に大きな競技会が続いたので,ロボット業界の大イベントである DARPA Robotics Challenge Final (DRC) の会場を訪れることにし,オープンソースのロボット技術の潮流を体感することにしました (当協会理事・岡田准教授の出場チームの応援は無論ですが!).
#なお DRC については詳細は省きます.例えば日刊工業新聞記事などをご参考まで.
さて,参加チームは,競技が終了するまでは目一杯でしょうし,突然訪れて技術の根幹を教えてくれるわけもありません.そこはそれ,ROS の運営を行う米・オープンソースロボティクス財団 (OSRF) の幹部達と話したところ (当協会理事・斉藤が以前同財団でインターンした際の上司でもあります),既に多くのチームが ROS を利用している感触を得ているとのこと.後日同財団 WEB サイトに掲載されたレポートによると,23チーム18チームにおいて ROS が,14チームにおいて Gazebo シミュレータの利用が確認されたとのことでした.また,当協会独自の調べでは,3チームが ROS 経由で OpenRTM を利用しており,1チームは OpenRTM を中心にシステムを構成していました.
参加した24種類のロボットの形態は,最多を占めた二足歩行だけでなく,優勝した KAIST の変形型や多足など,バラエティに富んだものとなりましたが,どのロボットも例外なく複雑なシステムであったと思われます.また,億を超える優勝賞金,投入するリソースの量からしても,各チームともシステムエラーによる失敗はまず避けたかったはずです.そのようなミッションクリティカルなシステムの制御にオープンソースの技術がこれだけ多くのチームで使われたというのは,オープンソース支持者として喜ばしい限りです.
[オマケ] ロボットの貴重な操作画面を撮影出来たので共有します.上位入賞した米・IHMC のものです.カメラ画像とセンサー画像両方を見つつ,環境モデル中のオブジェクトと知覚情報とを合わせた後に,タスク指令を出していると思われます.災害下の通信が不安定な想定のため,pointcloud が数十秒間に一回しか更新されない厳しい状況でも,そつなく作業を進めているのが見て取れます.このような高信頼が求められるシステムにおいて,ハードウェアでなくソフトウェア・ベースの入力装置が多くのチームに用いられたのも興味深いことでした,
なお IHMC は Java ベースの独自開発のプラットフォーム用いており,ROS API もあるとのこと.NASA JSC が開発中の二足歩行ロボット Valkyrie (2016年には Space Robotics Challenge のプラットフォームとして使用される) も同じソフトを使うそうです.
サービス精神旺盛の IHMC チームのガラージ前はこのようにモニターが据付けられ,チーム内外の人が気軽に観戦できるようになっている.小さいが写真奥には,競技中のロボットを操作するメンバーと DARPA の監視役メンバーが作業している.

Pilot workshop using NEXTAGE OPEN at Kawada RoboticsNEXTAGE OPEN ワークショップ (パイロット版) を開催しました (於: カワダロボティクス株式会社)
当協会では2014年8月から,オープンソース・ソフトウェアを用いてロボットを操作・開発体験するワークショップを開催してきており,小規模ながらこれまで30回以上開催・のべ100名様以上にご参加頂いています (これまでの開催内容は主にこちら・こちら・こちらの三種類).企業を中心とした参加者様のニーズは多様で,当協会としてもワークショップ内容の幅を今後より拡げ,ご要望に応えて参りたいと考えています.
その一環として,今回,カワダロボティクス社の NEXTAGE OPEN のワークショップ (パイロット版) を開催いたしました.このロボットは当協会がオープンソース版制御ソフトウェアをサポートさせて頂いており,今回カワダロボティクス社にロボットと場所のご提供を頂き,モニターとして既に同モデルのロボットをお使いの方々にお越し頂きました.
Starting from Summer 2014, TORK has been holding workshop/seminar/tutorials for introducing how to operate robots with opensource software, specifically ROS over 30 times for businesses in Japan (attendee has widely varied from robot manufacturers, electronics to web or even game developers). Today, we added another set of courses that use NEXTAGE OPEN from Kawada Industries (that also generously sponsored us the robot and the venue), of which opensource version of controller software we are very actively involved in its maintenance.

左図.会場としてお借りしたカワダロボティクス社の “コボット・パーラー” は,明るく落ち着いたリラックスできる協働スペースです.
ワークショップは,基盤となるソフトウェアである ROS の概要から始まり,ROS の代表的なモジュールの一つである MoveIt! を用いた動作生成を体験しました.また,体外に設置した点群カメラを用いた障害物を考慮した動作生成や,手先カメラで認識したマーカを掴む等,既存ユーザから要望の高い認識を用いたアプリケーションの概要も示されました.
当協会では今後このワークショップをラインナップに加え,NEXTAGE に興味をお持ちの方々や既にこのロボットをお持ちの方々の開発のヒントをご提供できればと考えております.初心者向け,中/上級者向けと,段階に応じて内容も充実させていく予定です.ご意見・ご要望を頂けると幸いです.info[a_t]opensource-robotics.tokyo.jp
Workshop started off with an overview of ROS and the review of basic concepts and commands. Then attendee experienced operating the robot with MoveIt! motion planner. Integration with vision (using Kinect, embedded hand cameras) was also introduced.
It is unclear yet whether the full content of the workshop will become available online, but some part of it that is missing from the current set of the tutorials will be added.
May 2015 ROS Workshop Schedule UpdateROS ワークショップ日程更新! (2015年5月)
企業向け ROS ワークショップシリーズ,2015年5月の開催分はまだお席がございます.好評により中級・マニピュレーション編の追加開催を決定しました!
各セミナーのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.
なお,中級・マニピュレーション編と,初級・産業双腕 Baxter 編の次回開催は都合により未定です (最遅9月には開催予定) ので,暑い日本の夏・ロボットの夏を迎えるための準備は今がチャンスです!
“ワークショップ” とは別に,理論や現状などを知りたいという方々向けの所謂”セミナー”の開催も検討しています.
また,お客様のオフィスを訪問しての出張・プライベートワークショップも好評頂いております.今年既に3件お邪魔致しました.
ご意見頂ければ幸いです.
info[a-t]opensource-robotics.tokyo.jp
Still some seats available in our ROS workshop courses in May 2015 in Tokyo! Some courses won’t be held for awhile (Introductory course using Baxter, and the Intermediate-Manipulation course) thus this will be your last chance before the bot-hot Summer in Japan! Any inquiry can be appreciated at info[a-t]opensource-robotics.tokyo.jp
ROS Workshop Schedule (May., 2015)ROS ワークショップ日程 (2015年5月)
企業向け ROS ワークショップシリーズ,2015年5月の開催予定日です.ゴールデンウィークや,企業様プライベートセミナーが複数入るなどして開催日が限られています.
各セミナーのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.
なお,これまで当社ではこれまで “セミナー” と呼んでおりましたが,この度ワークショップに改称しました.これらのワークショップではまず手を動かしてみてから理論を学ぶ,という方法を取っているためこの方がより適当であると考えました.
“ワークショップ” とは別に,理論や現状などを知りたいという方々向けの所謂”セミナー”の開催も検討しています.ご意見頂ければ幸いです.
info[a-t]opensource-robotics.tokyo.jp
5 ROS Seminar courses will be held in April 2015 by TORK in Tokyo, Japan. Any inquiry can be posted at info[a-t]opensource-robotics.tokyo.jp
PS4Eye Stereo カメラの ROS パッケージのリリースをお手伝いしました
PS4Eye Stereo カメラの ROS パッケージのリリースをお手伝いしました! といっても私達はほとんど何もしていません...
- PS4Eye の Linux バージョンは https://github.com/ps4eye/ps4eye の
ps4eye さんの作品.
- これを ROS で読み書きできるようにしたのは https://github.com/longjie/ps4eye の
longjie さんの作品.
- 私達は bloom というツールをつかって debian パッケージを作成しただけです.いや,パッケージ作成も OSRF の ROS Build firm に丸投げです.
皆さんの力を合わせてより使いやすい環境を準備しロボット技術を前進させていきましょう! 
TORK (東京オープンソースロボティクス協会)
ROS Seminar Schedule (Apr., 2015)ROS セミナー日程 (2015年4月)
2014年夏に開始した企業向け ROS セミナーシリーズはお陰様で大好評を頂きました.2015年度も引続き開催して参ります!4月は合計5回の開催を予定しています.各セミナーのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.

5 ROS Seminar courses will be held in April 2015 by TORK in Tokyo, Japan. Any inquiry can be posted at info[a-t]opensource-robotics.tokyo.jp
ROS セミナー基礎編・産業用双腕 Baxter
Baxterセミナーの名称をROS セミナー基礎編・産業用双腕 Baxterとして,本日も日本バイナリ株式会社様のオフィスをお借りしてをセミナーを開催しました.
最近アップデートが盛んなBaxter,今回が最後のHydro環境での講習会かもしれません.
学生の方もオープンソース協力特別無料コースでご参加いただけます.
ROSセミナー基礎・産業双腕Baxter

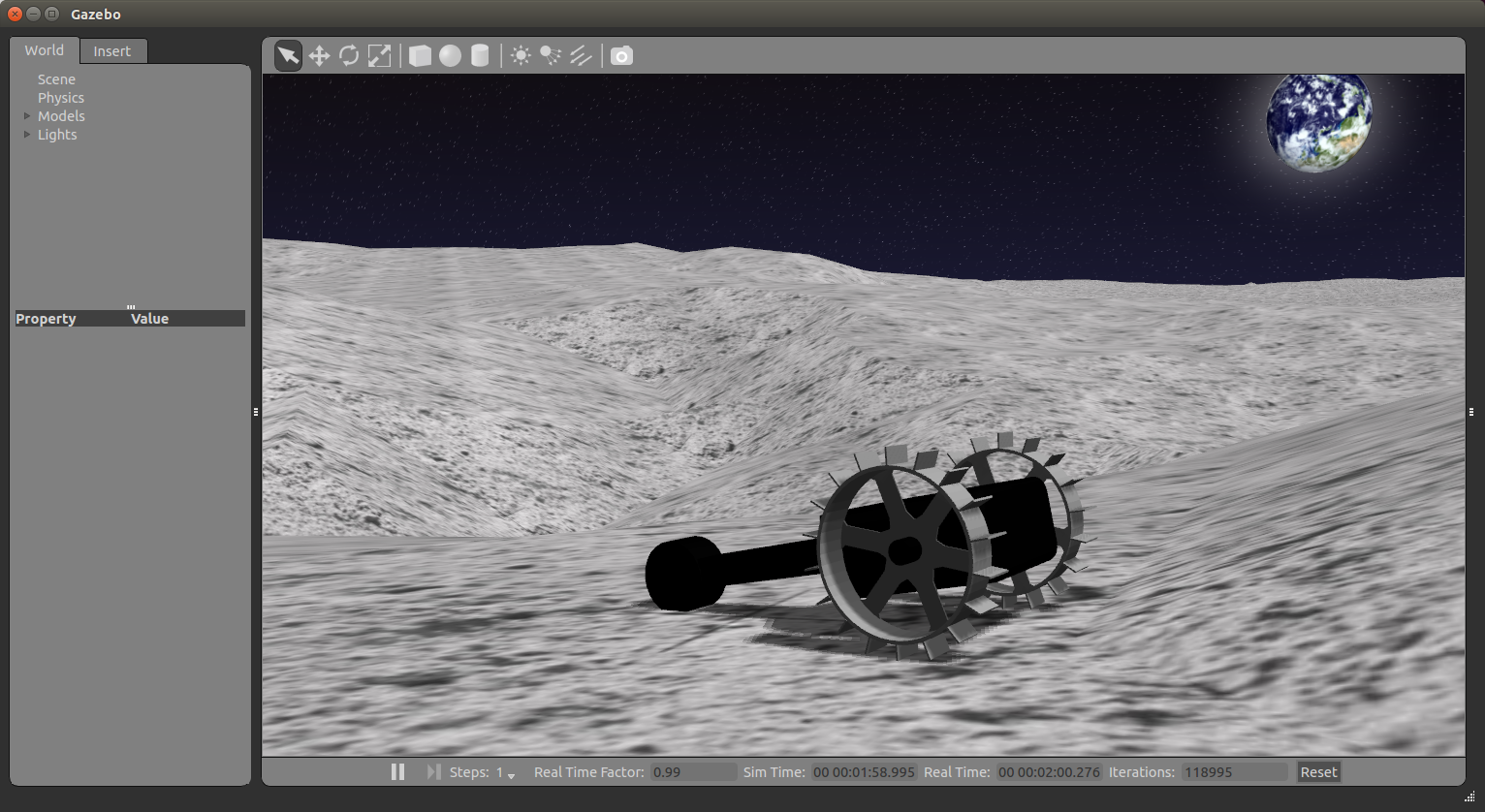
Lunar Rover ROS/Gazebo SimulationHAKUTO ロボットシミュレータを開発しました
We worked with HAKUTO project, a Google Lunar XPRIZE contender from Japan, and helped their robots to thrust on the moon’s surface, virtually.
From its wiki page, you can try using ROS/Gazebo simulator of their robot.
Video
月面着陸するミッションに挑戦する Google XPrize で日本から唯一参加する HAKUTO のロボットの ROS/Gazebo シミュレータを開発しました.
是非 wiki ページ からダウンロードしてみてください.
動画
Action required for NEXTAGE OPEN users for the upcoming software updateNEXTAGE OPEN ユーザの皆様へ:次回ソフトウェア更新する際の大事なお報せ
Upon the upcoming software update that’s reportedly scheduled soon (today: March 12, 2015), you might be required to apply small changes to your application.
Please read the following announcement and figure out if you’re affected, and take necessary actions.
https://github.com/tork-a/rtmros_nextage/issues/153
Please do not hesitate to send us any questions.
TORK
次回ソフトウェア更新の際に,お客様がお使いの NEXTAGE OPEN が動かなくなる場合があります.大変お手数ですが,以下リンクのアナウンスをお読み頂き,アクションが必要な場合は実施下さい.
https://github.com/tork-a/rtmros_nextage/issues/153
ご不明点はどうぞ遠慮なくご質問下さい.
東京オープンソースロボティクス協会
nextage_ros_bridge 0.6.1リリース!
nextage_ros_bridge 0.6.1 をリリースしました!
これまでのいくつかの不具合が解消されています.
NEXTAGE OPENサポートに入られていてアップデートに興味の有る方は是非ご連絡ください.

TORK mentors for GSoC15GSoC15 のメンターを引き受けます
TORK will be mentoring a student for Google Summer of Code 2015 organized by OSRF (Opensource Robotics Foundation), once a student is assigned to our project.
Please see project description at OSRF web site for more information. Discussion about our project happens here.
OSRF (Opensource Robotics Foundation) が実施する Google Summer of Code 2015 のメンターを引き受けることになりました.
興味の有る方はプロジェクト説明をご覧いただくか,お気軽にお声がけください.プロジェクトに関する議論はこちらで行っています.
Seats still available for ROS seminars in March 20152015年3月開催の ROS セミナーご参加募集中です
3月中に東京・湯島にて開催する ROS セミナーに若干のお席の余裕がございます.こちらのフォームよりお急ぎの上お申込みを頂ければ幸いです.
3/6/2015 中級・マニピュレーション編 終了
3/13/2015 初級編 終了
3/24/2015 中級・マニピュレーション編 満席.
4月にも予定していますので当協会 WEB サイト (今ご覧のサイトです) か Twitter を引き続きご覧下さい.
プライベートROSセミナーを開催しました
本日は某企業様の会議室をお借りして,企業内でのプライベートROSセミナーを開催いたしました.
多くの参加者の方を迎えたセミナーとなり,大変緊張いたしました.
活発に質問もいただき密度の高い講習となりました.ありがとうございました.
3rd ROS Basic seminar with Baxter in TokyoROS セミナー基礎編・産業用双腕 Baxter 第三回開催のお知らせ
TORK is holding the 3rd and 4th Baxter Research Robot seminar in March after the successful previous occurence in January. See the detail and how to register in this page.
2015年1月の第二回も好評を博しました Baxter ROS のセミナー,これまでと同様日本バイナリー株式会社様の協賛により,3月に二回のセミナーを東京で開催することとなりました.Baxter Research Robot の紹介に加え,ROS を用いた動作計画プログラミング,認識行動プログラミングを体験することが出来ます.セミナーの詳細・申込み方法はこちらよりご覧ください.
NEXTAGE OPEN チュートリアル信州大学山崎研
TORK
柔軟物操作,データ指向ロボティクスの研究で活躍されている信州大学山崎研究室でNEXTAGE OPENのミニチュートリアルを開きました.学生さんの熱心な質問攻撃にタジタジ.今後もぜひNEXTAGE OPENを活用して素晴らしい研究成果を挙げてくださることを期待します.

NEXTAGE OPEN
ROSセミナー中級編を開催しました
本日も湯島のミーティングスペースにてROSセミナー中級編を開催しました.
公開されている日程で都合が付かない方もご相談いただければ調整できる場合もございます.
気軽にお問い合わせください.
info@opensource-robotics.tokyo.jp

第二回 Baxterセミナーを開催しました
今回も日本バイナリ株式会社様のオフィスをお借りして産業用双腕 Baxterセミナー を開催しました.
Baxterをお持ちでない方も参加できます.ROSの概要も解説いたしますので初心者の方でもご参加いただけます.
Baxter Research Robot
ROSセミナー中級編を開催しました
湯島のミーティングスペースにてROSセミナー中級編を開催しました.
お申込みはWebから受け付けております.
または info@opensource-robotics.tokyo.jp へ気軽にお問い合わせください.

2nd Baxter Research Robot seminar in TokyoBaxter Research Robot セミナ第二回開催のお知らせ
TORK is holding the 2nd Baxter Research Robot seminar this month after the successful occurence in Dec 2014. See the detail and how to register in this page.
2014年12月に開催し好評を博しました Baxter Research Robot のセミナー,前回と同様日本バイナリー株式会社様の協賛により,今月1/27 (火曜) に同社東京オフィスで開催できる運びとなりました.Baxter Research Robot の紹介に加え,ROSを用いた動作計画プログラミング,認識行動プログラミングを体験することが出来ます.セミナーの詳細・申込み方法はこちらよりご覧ください.
Intermediate ROS Seminar (manipulation)ROSセミナー中級(マニピュレーション)編 開催のお知らせ
We’re happy to finally announce Intermediate ROS Seminar for manipulation as follows. This will be held in Japanese in Tokyo as usual, please do not hesitate to contact us if you have any interest.
Date: January, 2015
Venue: Our shared-office in Yushima, Tokyo
Fee: 49,800 JPY (tax included. 29,800 JPY for the multiple persons who share a single robot)
Required: Already taken our introductory ROS Seminar or has equivalent experience.
Content: オリジナルのロボットアームを作成して動かす場合に必要な知識の獲得を目的とします.具体的には,Dynamixel サーボモータを使用した4軸ロボット「StackIt!」により,マーカのついたパックの pick&place を行います.
この際に,ロボットモデル(URDF)の作成方法や MoveIt! の設定方法を学びます.セミナーで使用するテキストの目次は以下の通りです.
1.ロボットアームのモデル作成と表示
2.実物のロボットとシミュレータ(RViz)上のロボットの接続
3.MoveIt! を使ってシミュレータ(Rviz)上のロボットを動かす
4.MoveIt! を使って本物のロボットを動かす
5.カメラによる AR マーカの認識と座標変換
6.ロボットの動作プログラムの作成
ご持参頂くもの: Ubuntu12.04LTSおよびROS(Hydro)がインストールされた PC
申込方法: info[ at ]opensource-robotics.tokyo.jpまでお問い合わせください.
ROSセミナー中級(マニピュレーション)編を下記要領で開催致します.
日時: 2015年1月23日(金)10時~18時
会場: シェアオフィスコトバ会議室(東京メトロ 千代田線 湯島駅より徒歩3分)
参加費: 49,800円(税込),ただし1社より2名様参加で1台のロボットを共有して頂く場合は1名様あたり29,800円(税込)
対象者: ROSセミナー基礎編を受講済みもしくは同等の知識をお持ちの方
内容: オリジナルのロボットアームを作成して動かす場合に必要な知識の獲得を目的とします.具体的には,Dynamixel サーボモータを使用した4軸ロボット「StackIt!」により,マーカのついたパックの pick&place を行います.
この際に,ロボットモデル(URDF)の作成方法やMoveIt!の設定方法を学びます.セミナーで使用するテキストの目次は以下の通りです.
1. ロボットアームのモデル作成と表示
2. 実物のロボットとシミュレータ(RViz)上のロボットの接続
3. MoveIt! を使ってシミュレータ(Rviz)上のロボットを動かす
4. MoveIt! を使って本物のロボットを動かす
5. カメラによる AR マーカの認識と座標変換
6. ロボットの動作プログラムの作成
ご持参頂くもの: Ubuntu12.04LTSおよびROS(Hydro)がインストールされたPC
申込方法: info[ at ]opensource-robotics.tokyo.jpまでお問い合わせください.
第一回 Baxterセミナーを開催しました
Baxter Research Robotセミナーを開催しました.初回にもかかわらず,大勢の皆様にご参加いただきました.
学生の方にはオープンソース協力特別無料コースの参加で積極的な活動をしていただきました.
今後も双腕のBaxter ロボット使った本セミナーで研究開発分野でのユーザの広がりを支援してまいります.
Baxterセミナー
Seminar for Baxter Research RobotBaxter Research Robot セミナ開催のお知らせ
12/13/2014: 終了しました.今後の Baxter セミナーの情報はこちらに更新して参ります.

- 主旨:米・Rethink Robotics 社が2012年に,安価・安全を売りとして中小企業の生産ライン向けに発表した協調作業用の双腕ロボット Baxter Research Robot (研究版) の概要と使い方を解説します.先端的なメカニズムとインターフェースを持つ Baxter ロボットの特徴に加え,近年研究開発分野でユーザが広がってきているオープンソースのロボット用ソフトウェア ROS を使った,動作計画プロうグラムや認識行動プログラム例も概要を紹介し,ご体験いただきます.
- 名称:Baxter Research Robot セミナー(ショートコース)
- 主催:東京オープンソースロボティクス協会
- 協賛:日本バイナリー株式会社
- 日時:2014年12月9日 (火) 14:00-17:30
- 場所:日本バイナリー株式会社様 セミナールーム (東京都港区芝)
- 費用:12,000円 (学生向けのオープンソース協力特別無料コース有り)
- 対象
- Baxter Robot の特徴について知りたい方
- Baxter Research Robotを用いたプログラミングに興味の有る方
- ROSの概要,並びにプログラミングに興味がある方
- カリキュラム
- 第一部 Baxter ロボット/ROS概要の紹介
- Baxter ロボット紹介
- Baxter Research Robot,ROS 概要
- 第二部 ロボットプログラミング・ハンズオン
- MoveIt! 動作計画プログラミング
- 視覚認識と行動生成プログラミング
- 第一部 Baxter ロボット/ROS概要の紹介
- ご持参頂きたい物
- 第二部では以下条件を満たすコンピュータをご持参いただくと,実際にプログラミングを体験していたくことが可能です.
- Intel i5 以上,4G以上のメモリ,7G以上の空ディクス容量,ネットワーク接続
- ハンズオン講習はUbuntu 12.04/ROS Hydro 環境で行います.
- ご持参いただくコンピュータがWindows,Macの方にはハンズオン講習可能なLiveUSBを提供します.
- 第二部では以下条件を満たすコンピュータをご持参いただくと,実際にプログラミングを体験していたくことが可能です.
- お申込: 締めきりました.次回開催予定も当 WEB サイトや Twitter 等で告知いたします.
- お問合せ:info[ at ]opensource-robotics.tokyo.jp
なお本セミナー受講されたお客様には続きとして,Baxter Research Robot の使いこなす上で欠かせない ROS に関するセミナーも,当協会では下記の通りご用意しております.
また,Baxter Research Robot の日本語コミュニティも開設されました.ros-sig-baxter-jp+subscribe@googlegroups.com へメイルを送るだけで,どなたでも無償購読できます.
TORK assisted Toyota to run a hackathon on HSR (Human Support Robot)トヨタ自動車様が開発中のロボット HSR (Human Support Robot) を用いたハッカソンを支援させて頂きました
トヨタ自動車株式会社 (以下トヨタ) 様が,同社が開発中のロボット “HSR” を用いた “ハッカソン” を行い,弊社はイベント運営とソフトウェア開発のお手伝いをさせて頂きました.
“ハッキング” (注) + “マラソン” の造語であるハッカソンは,短期間に集中してアイデアを出し合いながらソフトウェア開発を行い技術やアイデアを競い合うことで,新たなイノベーションのきっかけを模索するイベントです.
HSR は手足が不自由な人や高齢者の支援の為に開発中のロボットで,物を運んだり離れた所に居る人の様子を確認するなどして,家庭や施設での介護支援が念頭に置かれています.
トヨタ様では,HSR を研究の或いは医療福祉サービス提供のプラットフォームとして興味をお持ちの方々に実際に開発体験をして頂き,高性能のモバイル・マニピュレータを自由に扱って愉しみつつ,ユーザ視点のフィードバックを頂くことで今後の開発に繋げたい意向です.今回は,国内の研究者・学生の合計15名の方々を対象に,2014年10月23日,24日の二日間に渡り東京・湯島で開発を行なって頂きました.
まずデモと安全講習,チュートリアル等によってロボットの可能性を把握頂いた後,参加者はチームに分かれてこのロボットでの開発内容を話し合い,二日間の八割程度をチームごとの開発に費やしました.やはり HSR の本来の開発目的である介護シーンでの利用を中心に,しかし中にはエンタテイメント性を含んだり,バラエティのあるデモ案が実装に取組みました.
HSR は自己位置推定や認識に基づく障害回避,動作計画といった高度機能を搭載しており,それらはオープンソースのロボット用基盤ソフトウェアとして世界に広まりつつある ROS (Robot Operating System) 経由で利用できるため,既に ROS に習熟した参加者は違和感なくそれらの機能を用いて開発を進めることができたようです.一方 ROS にそこまで明るくない方も,簡易的にプログラミングできる Python 言語環境が用意されたため,支障なく開発を行うことができました.
二日間の最後には,成果発表,懇親会,ハッカソンイベントの”恒例”であるお揃いのイベント T シャツでの記念撮影などを通じ,濃密な二日間の労を労いつつ,HSR の今後の発展を話題にしながら親睦を深めました.
 HSR 三体が出動!
HSR 三体が出動!
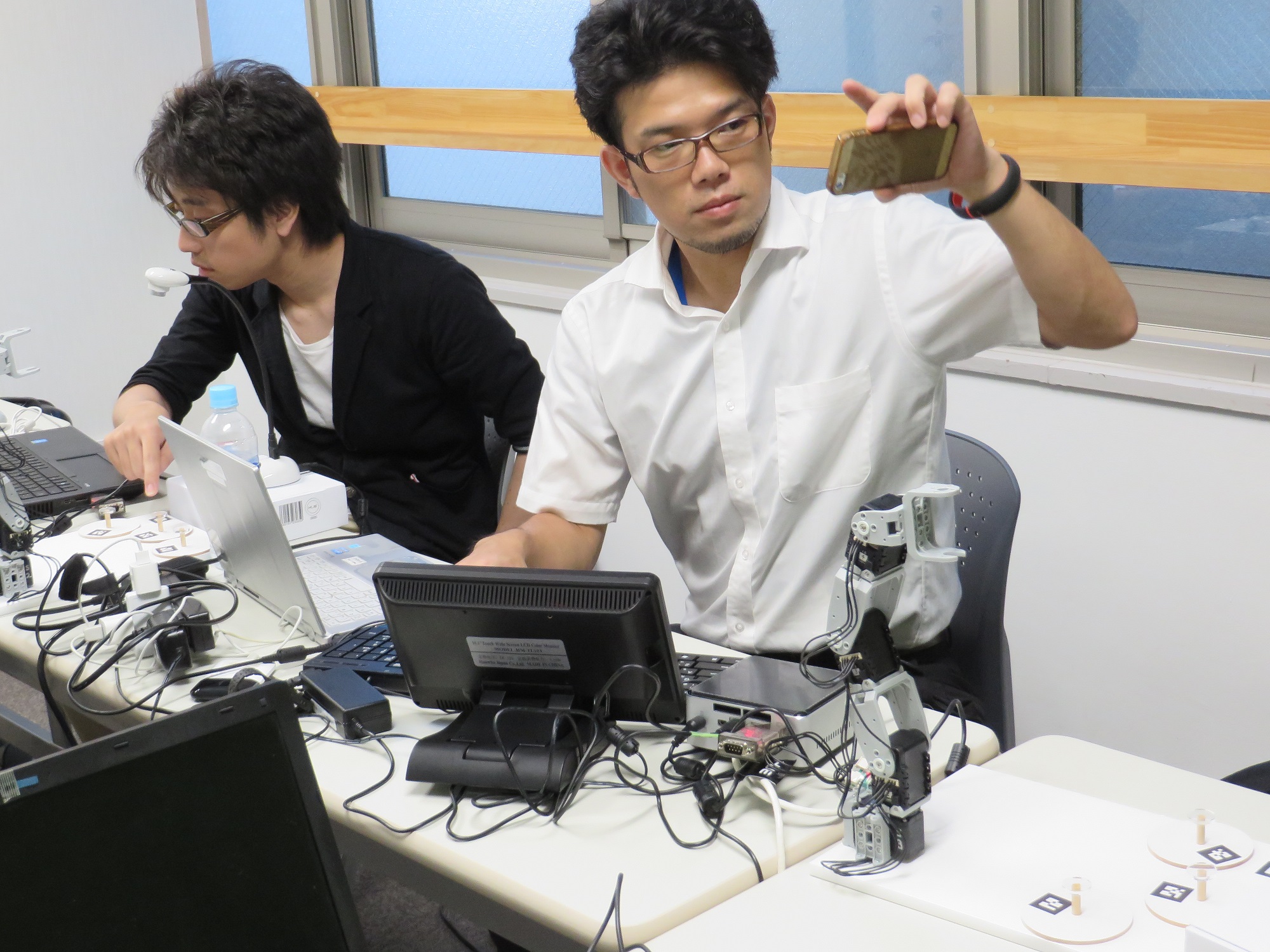
 開発真っ最中.活発な質問を頂き,トヨタ様・弊社共にスタッフも対応中.
開発真っ最中.活発な質問を頂き,トヨタ様・弊社共にスタッフも対応中.  ハッカソンの友:エナジードリンクの山.
ハッカソンの友:エナジードリンクの山.
 HSR,会話中 (静止画で伝わりにくいですが).
HSR,会話中 (静止画で伝わりにくいですが).
 トランプ対決!
トランプ対決!
 HSR は無事に洋服を届けられるか?全員が固唾を飲んでます.
HSR は無事に洋服を届けられるか?全員が固唾を飲んでます.
 ハッカソン T シャツを着込んだ皆様と HSR.お疲れ様でした!
ハッカソン T シャツを着込んだ皆様と HSR.お疲れ様でした!
注:ハッキングはコンピュータ等技術の深い知識を利用して様々な課題をクリアする行為を指します.メディア等では悪意を持ったコンピュータの侵入行為等がハッキングと呼ばれますが,本来その意味は”クラッキング”として区別されます (参考: Wikipedia).
Toyota Motor Corporation (TMC) hosted a 2-day hackathon on their HSR (Human Support Robot) on October 23th and 24th in Tokyo. TORK assisted the event organization and making the software.
HSR has been developed as an elderly care for domestic situations as well as in medical facilities. This time TMC invited researchers and students from institutes in Japan. 15 participants got a hands-on experience, tried out making small tasks to let the mobile-manipulator robot interact with human, and had fun.
All of the higher-end functionalities such as self-localization, vision-based collision avoidance, motion planning and so on are available via a de-facto standard opensource robotics framework ROS (Robot Operating System) (that is, as previously announced). It also comes with script language interface so that it doesn’t require developers to be well acquainted with ROS.
With the feedback from the attendees this time TMC expects to boost the development in the future.
Reference:Announcement on TMC Facebook page (in Japanese)
One of the best accompaniment at hackathons: energy drinks.
HSR, talking.
HSR plays the card!
HSR picking a shirt for an (hypothetical) elder person.
Baxter Research Robot ROS Users Community in JapaneseBaxter Research Robot の ROS ユーザ向け日本語コミュニティ
So it’s been awhile since the Rethink Robotics has announced an industrial dual-arm robot Baxter, and the community of its research version has been very active world-wide. We just created a yet another community particulalry for users who are the most comfortable in Japanese.
Splitting forums into each language is always a question when the knowledge for the subject domain overlaps almost 100% so that users in any language could have shared info if the discussion channel is united. Reality isn’t that just simple for people who are naive to English and often end up being passive about expressing themselves. Thus we rather open a language sig to first stimulate the conversation local to the language. Hope one day technology evolves so that you can query in any language and reach the same batch of info (I know you have come close Google)!
Join here: Baxter ROS user group in Japanese
Rethink Robotics が安価な産業用総腕ロボット Baxter とその研究者向け版 (RBB) を発売して久しいです.その英語のコミュニティは活発で毎日何通かのメイルで Baxter 固有の問題に関するやり取りが行われています. しかしそこでの日本人と思しきユーザの発言は極めて少ないのが現状で,日本語の Baxter ユーザは居ないのではないかとすら思えてしまいそうです.
言語毎にコミュニティを分けるのは,あるドメインのコミュニティにとって最良の解決策ではありません;一般的でない言語で書かれた情報はその言語ユーザ間でしか共有されず,共有されない情報は発展もしないので,長い目でみると誰もハッピーになりません.しかしながら現実は言語が隔てる壁は高いのも無視できません.理想を掲げる前に,まずは発言を共有したいと考え,Baxter 日本語コミュニティを作りました.
http://groups.google.com/d/forum/ros-sig-baxter-jp
いつの日か技術によって言語関係なく情報を共有できる日が来たら楽ですね.
Calling for trial participant for ROS Advanced Seminar (in Japanese)ROSセミナー中級編のモニター募集
当協会は,ROS 学習用教材の開発にも注力しております.
かねてから予告しておりましたROSセミナー中級編の教材が完成致しました.
この中級編では以下の「StackIt!」ロボットを動かすことを通じて,ROS 用のロボットモデル(URDF)の作成方法とROSにおける座標変換およびMoveIt! を利用したマニピュレーションの基礎を習得することが出来ます.
「StackIt!」ロボットは,任意の場所に置かれた3つのパックを順番に積み重ねていくタスクを実行する4軸ロボットです.
セミナー用教材の目次は以下のようになっております.
1.ロボットアームのモデル作成と表示
2.実物のロボットとシミュレータ上のロボットの接続
3.MoveIt!を使ってシミュレータ上のロボットを動かす
4.MoveIt!を使って本物のロボットを動かす
5.カメラによるARマーカの認識と座標変換
6.ロボットの動作プログラムの作成
本格開講に先立ちまして,このROSセミナー中級編のモニターを募集いたします.
一社当たり2名様まで,計3社分の募集となります.
開催日時は2014年10月3日(金)10:00~18:00です.
場所は湯島駅近くのシェアオフィスとなります.
参加費は無料です.
参加希望の方はinfo[a t]opensource-robotics.tokyo.jp までご連絡ください.
お申し込みは先着順となりますので,ご了承ください.
当協会は,ROS 学習用教材の開発にも注力しております.
かねてから予告しておりましたROSセミナー中級編の教材が完成致しました.
この中級編では以下の「StackIt!」ロボットを動かすことを通じて,ROS 用のロボットモデル(URDF)の作成方法とROSにおける座標変換およびMoveIt! を利用したマニピュレーションの基礎を習得することが出来ます.
「StackIt!」ロボットは,任意の場所に置かれた3つのパックを順番に積み重ねていくタスクを実行する4軸ロボットです.
セミナー用教材の目次は以下のようになっております.
1.ロボットアームのモデル作成と表示
2.実物のロボットとシミュレータ上のロボットの接続
3.MoveIt!を使ってシミュレータ上のロボットを動かす
4.MoveIt!を使って本物のロボットを動かす
5.カメラによるARマーカの認識と座標変換
6.ロボットの動作プログラムの作成
本格開講に先立ちまして,このROSセミナー中級編のモニターを募集いたします.
一社当たり2名様まで,計3社分の募集となります.
開催日時は2014年10月3日(金)10:00~18:00です.
場所は湯島駅近くのシェアオフィスとなります.
参加費は無料です.
参加希望の方はinfo[a t]opensource-robotics.tokyo.jp までご連絡ください.
お申し込みは先着順となりますので,ご了承ください.
2014年10月開始のROS セミナー中級編の予告
当協会は,ROS 学習用教材の開発にも注力しております. おかげさまで,第一弾の ROS セミナー「基礎編」は,ほぼ毎週開催させて頂く運びとなっております. 2014年10月より,ROS セミナー第二弾「中級編」を開催させて頂きます.「中級編」では,MoveIt! を使ってオリジナルのロボットを動かします.具体的には,以下のムービーのように,カメラ画像から物体の位置を推定して特定のタスクを実行させます.
詳細については以下のURLをご参照ください.
https://opensource-robotics.tokyo.jp/?page_id=666
このセミナーを通じて,CAD の図面を基にして ROS 用のオリジナルのロボットモデル(URDF)を作成するのに必要な知識を得ることが出来ます.また,MoveIt! を利用したマニピュレーションの基礎を習得することが出来ます.上記例では AR マーカを使用していますが,3次元位置計測装置等使用することにより将来的にバラ積みピッキング等にも応用が可能です. セミナーは2~3日間で行われる予定です.こちらのセミナーは有償となります.金額については,info[a t]opensource-robotics.tokyo.jp までお問い合わせ下さい.正式な開催日時等決まりましたら,また当ウェブサイトにてお知らせさせて頂きます. 引き続き,「基礎編」の参加者も募集しております.詳細は,上記メールアドレスまでお問い合わせ下さい.
Seeking a talent for immediate short-term web-robot development超短期の web-ロボット開発作業ができる方を募集します
We’ve posted an ad on ros-users forum. Forwarding to anyone who might get interested in is appreciated!
超短期の募集を ros-users フォーラムに告知しました.ご興味ありそうな方に転送下されば幸いです.
Free ROS seminar for business users企業様向け無償 ROS セミナー開催のお知らせ
TORK is now ready to roll seminars for ROS for business developers who are interested in building robots using ROS. Though we’ve started off giving free sessions but in Japanese, send us any interest to info[a t]opensource-robotics.tokyo.jp. See the Japanese translation page for images.
UPDATE 2015年4月: 無償セミナー開催は終了しました.引き続き ROS ワークショップ初級編 (有償) として好評開催中です.
この「基礎編」では,ROS を使ってセンサからの情報でアクチュエータを動かすところまで学習することを目的としています.
具体的には LeapMotion というセンサを用いて,
TORK to appear at ROS Kong 2014TORK は香港でのワークショップ “ROS Kong 2014” に参加します
On top of any community socializing events that have been recently announced in ROS community, ROSCon is the one officially organized by the maintainer of ROS, OSRF, and has been the most attractive force for the last two years since its first occurrence. Now this year it comes to Asia for the very first time, in Hong Kong!
Among all the guests speakers coming around Asia-Pacific region including Korea, Australia, Hong Kong and two from Japan, an associate professor at University of Tokyo and our CTO Kei Okada is honorably giving an opening speech at a one-day event. Here’s an abstract excepted from ros.org.
Hope to see you there!
Open Source Robotics at JSK/Tokyo
Kei Okada
Robotics, specially Humanoids research requires long-term vision and efforts due to it’s complexity and synthesis. This talk will show research history on humanoid robots last 20 years at JSK/U-Tokyo and discuss how we have been integrating and maintaining integrated humanoid software over different generation of both students and robots. Rapid-prototyping and contentious-development is the key of these environment and how these features are utilized in national/international projects and challenges. From this perspective, emergence of opensource robotics had great impact since we already had great deal of in-house software resources and had to cope with how to fuse and connect existing internal software and external open software. I’ll not only explain strategy to this integration but also show our automatic translation system of different software component. Lastly, I’ll explain our effort on commercializing our software in Tokyo to expand open robotics software not only academia but also robotic industries.
 (Image referring to https://events.osrfoundation.org/wp-content/uploads/2014/03/ROSKong14_Shirt_500.png)
(Image referring to https://events.osrfoundation.org/wp-content/uploads/2014/03/ROSKong14_Shirt_500.png)
過去二年間,ロボティクスの国際学会 ICRA の直後に開催されてきた ROS 開発者・ユーザの祭典 ROSCon ですが,今年は遂にアジアで初めて,香港での開催となりました!
それに伴ってか少し趣旨変わり,これまで二日間だったのが一日間となり,名称もこのようになりました.ROS コミュニティのアジアでの勃興を意識してなのか,ゲストスピーカーも韓国,豪州そして地元香港から一名,そして日本から二名と環太平洋勢となりました.そんな中,東京大学准教授・当社代表理事の岡田慧がオープニングのスピーチをさせて頂くことになりました.ros.org に掲載されたアブストラクトを以下に引用します.
Open Source Robotics at JSK/Tokyo
Kei Okada
Robotics, specially Humanoids research requires long-term vision and efforts due to it’s complexity and synthesis. This talk will show research history on humanoid robots last 20 years at JSK/U-Tokyo and discuss how we have been integrating and maintaining integrated humanoid software over different generation of both students and robots. Rapid-prototyping and contentious-development is the key of these environment and how these features are utilized in national/international projects and challenges. From this perspective, emergence of opensource robotics had great impact since we already had great deal of in-house software resources and had to cope with how to fuse and connect existing internal software and external open software. I’ll not only explain strategy to this integration but also show our automatic translation system of different software component. Lastly, I’ll explain our effort on commercializing our software in Tokyo to expand open robotics software not only academia but also robotic industries.
それにしても Kong という名称になっても ROS の場合はどこに行こうがやはりカメのようです.日本人だとキングコングや,往年の TV ドラマ “特攻野郎 A チーム”などを想起してしまう方もおられると思いますが (私はそうでした.歳がばれる?).
(Image referring to https://events.osrfoundation.org/wp-content/uploads/2014/03/ROSKong14_Shirt_500.png)
TORK Adds Another ROS wiki Mirror
As we mentioned a few months ago, mirrored web sites for ROS documents are in much need, not just when the original web site isn’t accessible but for a number of other reasons.
In ros-users forum there was recently an update announcement about ROS wiki mirroring status, and improved maintenance method for mirrors. On or before that announcement, TORK started mirroring wiki and api docs as well, which is also now noted in the list of mirrors on wiki.ros.org.
Needless to mention that this list of mirror sites aren’t accessible when the web site is down too…so I’ve updated a “mirror” of the list of mirrors.
Adopting Research Robots余っている研究用ロボットを探しています
April! The beginning of new fiscal year, new school, and most importantly the season of sakura blossoms here in Japan! So do we something new. TORK is planning to dedicate more this year on testing and stabilizing the software packages we develop/maintain on as many robots as possible. To do so we need testbed — robots. Yes, we need robots. We’re looking for research robots, preferably with an arm or two, that we can “adopt” from you. While we mainly limit to Japan where we have some ideas of how to legally transfer the machines, your contact from anywhere on earth would be appreciated to info [a t] opensource-robotics.tokyo.jp about your robots or about the possible collaboration.
東京オープンソースロボティクス協会は,多品種のロボットで試験を行い,より高信頼で適応性の高いソフトウェアの開発評価を行ないたいと考えています.ご使用予定の無いロボットがありましたら,お譲り頂ければ幸いです.info [a t] opensource-robotics.tokyo.jp までご一報ください.
wiki.ros.org ミラーサイト
According to status.ros.org, the wiki pages of ROS (wiki.ros.org) has been busy these days handling more than 60 requests every day every minute every day on average (seen on 2/20/2014). Just in case the web server may want to take a break for a moment, there are mirrors all over the world. The URLs are listed on this blog.
Ubuntu deb packages available (hrpsys and some of its clients)hrpsys 等の Ubuntu deb バイナリをメンテしています
The binary files have been already there since several months ago; this announcement is to raise more attention to the wonderfully easy debian packages that hopefully free you from compiling nightmare (unless you enjoy it more). Feedback is very welcomed!当社エンジニアの Isaac が,hrpsys や関連パッケージの Ubuntu バイナリ化状況について告知しました.
これらバイナリは実際は数ヶ月前,2013年夏頃から入手可能になってはいましたが,認知度を高め,コマンド一発で入手可能であることの便利さを体験して頂こうと考えたため,改めて告知しました.ご自分でコンパイルしないと気が済まない質でも無い限り,有効に利用頂けると期待しております.フィードバックも大歓迎です.
Our Demos in New Year MoveIt! MontageMoveIt! モンタージュに弊社ロボットデモ二件が取り上げられました
Happy 2014!
Last year was our inaugurate and thank you for the support and interest. We hope this year is going to be even more fruitful for both the world’s opensource robotics and us!
Development team of MoveIt!, a state-of-art motion planning tool in ROS, released a montage where two of the demo we were involved in last year (DENSO’s VS060,Kawada’s Nextage Open) are included. We happily refer to it to compensate our new year’s greeting.
2013 年は私達東京オープンソースロボティクス協会立ち上げの記念すべき年となりました.本年もより一層世界のオープンソース・ロボティクスに貢献していく所存です.
さて,ROS の動作計画ツール MoveIt! のビデオに私達が携わった動作計画デモ二件 (デンソー社 VS060,カワダロボティクス社 Nextage) が含まれたので,年賀状代わりとして引用させていただきます.
デンソーの産業用ロボット用 ROS パッケージ “denso” を公開しました
From ros-users.
デンソー社の産業用ロボットに対応する ROS パッケージを公開しました.経路計画アプリケーションの MoveIt! に対応します.

- 現在垂直多軸アームの VS-060 に対応します.
- ROS は UDP ベースの標準化されたプロトコル “ORiN” を通じてロボット内のコンピュータと通信します.このコンピュータは産業界で実績のあるもので,また ROS からの指示内容の異常値を検出する機構も持っています. これにより,同社製品の信頼性は損なわずにオープンソースの恩恵を取り込むことが可能になりました.
- しかしながら今回発表の ROS パッケージはまだ実験的なので,ユーザからのフィードバックは貴重です. RViz を利用したシミュレーションによって障害回避を体験して下さい.
- 東京大学 JSK が開発し,東京オープンソースロボティクス協会がメンテナンスを行います.
最期に,障害回避アプリケーションに不可欠な,ロボットの幾何モデルをオープンソースコミュニティに提供くださったデンソー社に感謝します.
岡田慧,植田亮平
1/05/2014 更新: パッケージ名を densowave から denso に更新しました.
Now you can get IROS/iREX DVD imageIROS/iREXで配布したDVDのオンライン配布
We are sorry that we did not have enough DVD for you at IROS/iREX.
Now you can get IROS/iREX DVD image from the link below.
htt
Reboot your PC from the DVD and login password is ‘opensource’.
Enjoy!IROS/iREXで用意したDVDの枚数が不足していたため,皆様にはご迷惑をおかけしております.
そこで,DVDのイメージを下記リンクからダウンロード出来るようにさせて頂きました.
htt
起動後のログインパスワードは opensource です.
IROS/iREX DVD content instructionIROS/iREX で配布した DVD の使い方ページ
At IROS and iREX 2013 that is occurring from Nov. 4 through 9, 2013 in Tokyo, we are showing demo at Kawada Robotics compartment. There we are distributing a DVD that contains an installer for our ROS-based robot component software rtmros_hironx. Here’s an instruction for it that you may find useful after installation is done. Enjoy!
現在開催中の IROS と iREX 2013 に,カワダロボティクス社のブースで展示中です.
お越し頂いた特典として,同社のスティッカーの他,TORK からは私達が保守を行なっている ROS ベースのソフトウェア rtmros_hironx を梱包した DVD を配布しています.
お使いの Ubuntu コンピュータに挿せばインストーラが起動し,すぐにお使いいただけます.200 枚用意した DVD もここまで四日間でおかげさまで残りわずかとなりました.しかし申し訳ないですがその使い方を書くのを忘れました!今回ここに記載したので,参照し,シミュレータ (/勿論実機をお持ちの方は実機で!) でお試し下さい.
続きを読む
ROSオープンソースを用いた基本ソフトウェアシステムのサポート開始について
一般社団法人東京オープンソースロボティクス協会は2013年8月にオープンソースソフトウェアに基づくロボティクス領域の形成と発展を目指して設立され,これまでにOpenRTM,ROS 等のロボット用オープンソースソフトウェアのユーザコミュニティ向け支援活動を行って参りました. この度,2014年1月より企業会員の募集を始めると共に,会員企業向けに ROS 導入に関わる諸問題の解決を支援する専用サポートサービスを開始致します.