World MoveIt! Day 2018 in Kashiwa-no-ha was held
World MoveIt! Day 2018 in Kashiwa-no-ha was held last Friday! I will introduce the state of the day by photograph. I hope to share the atmosphere with who could not participate.
State before opening

We are ready for start!
Opening
Finally the World MoveIt! Day 2018 in Kashiwa-no-ha started! There was explanation about an example of challenge at the hackathon.
TORK Tajima’s greeting
Next, there was an introduction of the robot from the company that exhibited the robot at the venue.

Sawyer

An announcement by SEED Solutions

Presentation by Fuji Soft
Hackathon (morning) starts!
Everyone is working muzzle. There were some people who tried the program on actual machines.

Hackathon’s appearance
Lunch
Good work every morning! It is lunch time.

The lunch we offered from Omron Sinic X Co., Ltd. was very delicious.

So yummy.
Presentation by participants
Presentation by participants began while eating lunch.
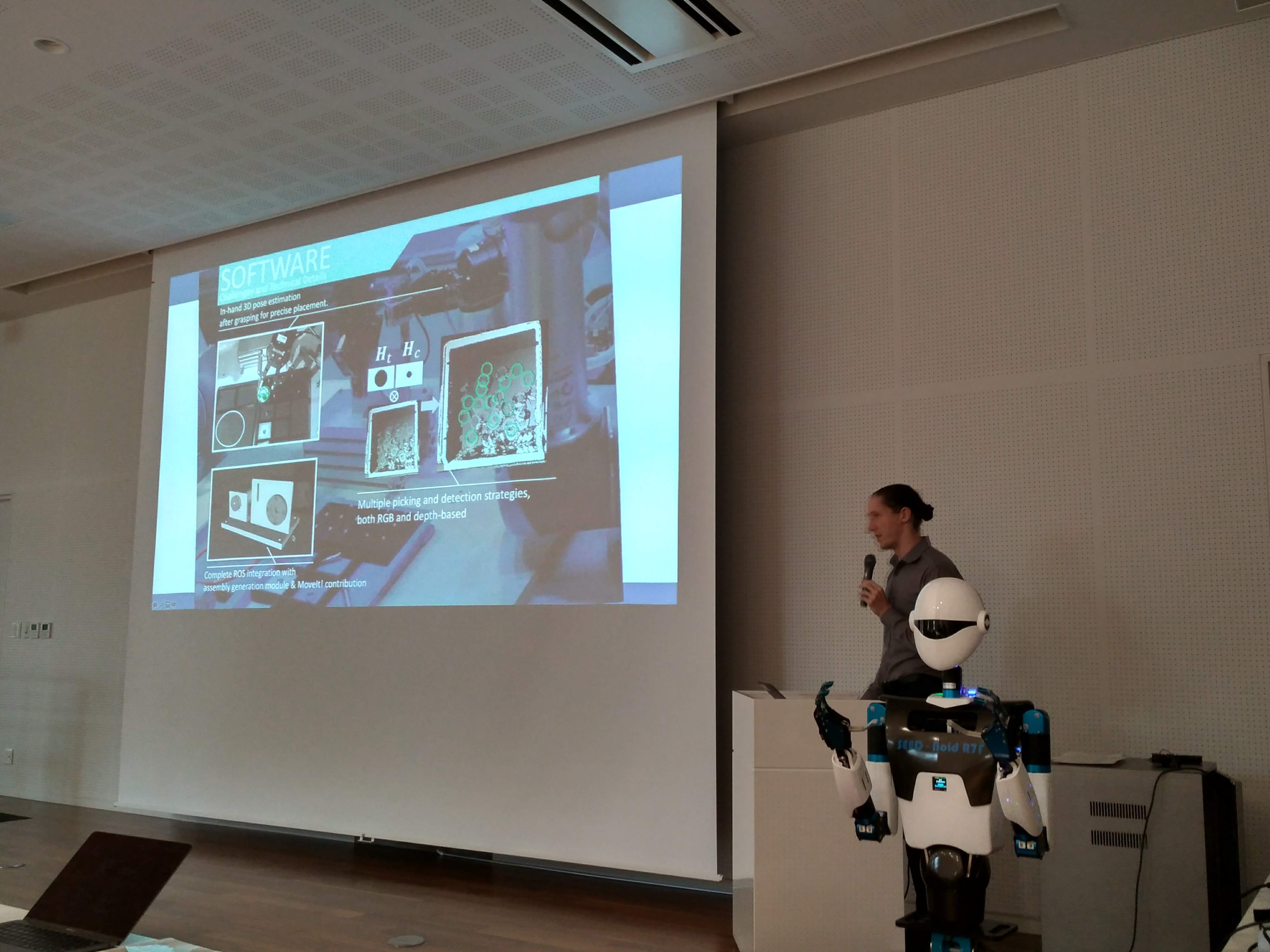
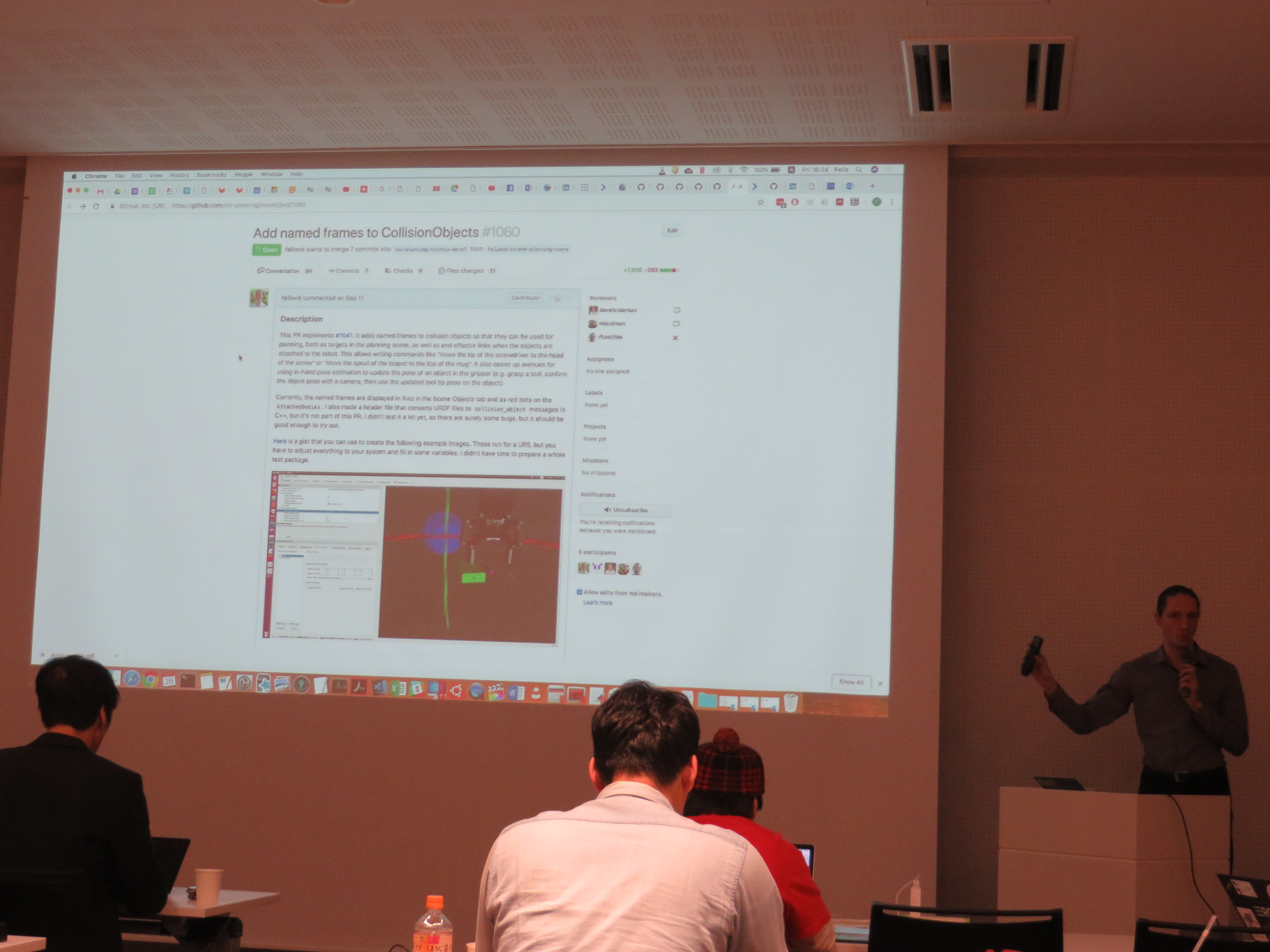
OMRON SINIC X Corporation @felixvd
An introduction of WRS2018 product assembly challenge participation report was given by Omron Sinic X Co., Ltd.

About MoveIt! Task Planning @ youtalk
He introduced about the new function of MoveIt! Task Constructor. This seems to enable parallel tasks such as moving while grabbing things that we could not do currently.
SEED-noid Introduction Mr. Kondo
The practical example of SEED-noid given by Seed Solutions, through the story of demonstration experiment at a competition set in a convenience store and a restaurant.
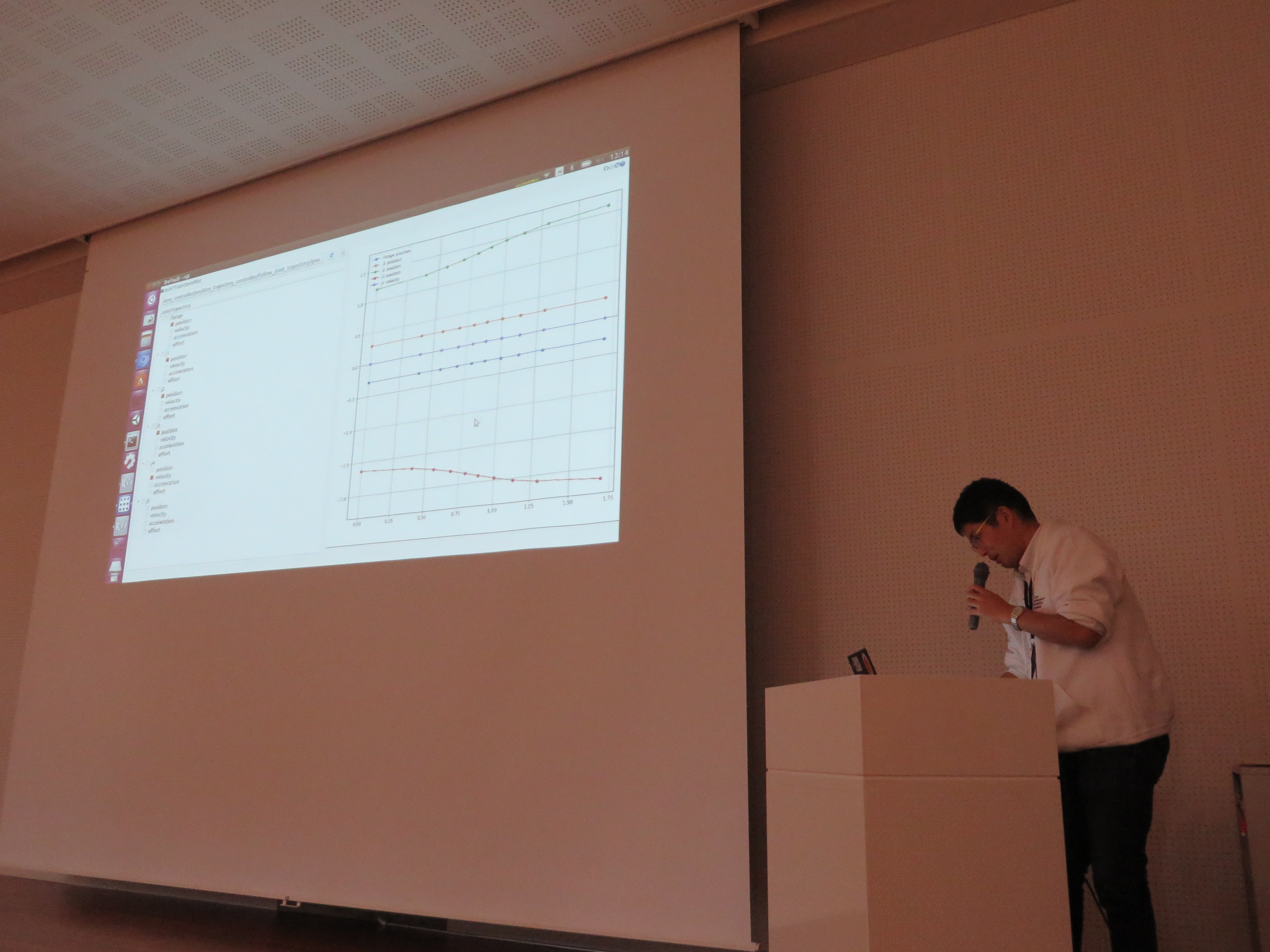
Introduction of JointTrajectoryPlot Taoka (TORK)
It is an introduction of useful tools when you want to know the angle of each joint when moving the robot with MoveIt!
Hackathon (afternoon) starts!
When the presentation is over, Hackathon is resuming.

As in the morning, quiet and calm time flows.
Achievement presentation
Thank you for your hard work! Hackathon is over. Time to present we worked on today all day.
Hold Kamehame-ha gesture with SEED-Noid Mover (Use MoveIt! On actual machine)

Move the new robot’s product with gazebo using MoveIt! (ROBOTIS-sama)

Add information on new robot products to MoveIt!’s homepage
To simplify collision calculation with MoveIt!, Simplify the robot’s mesh model
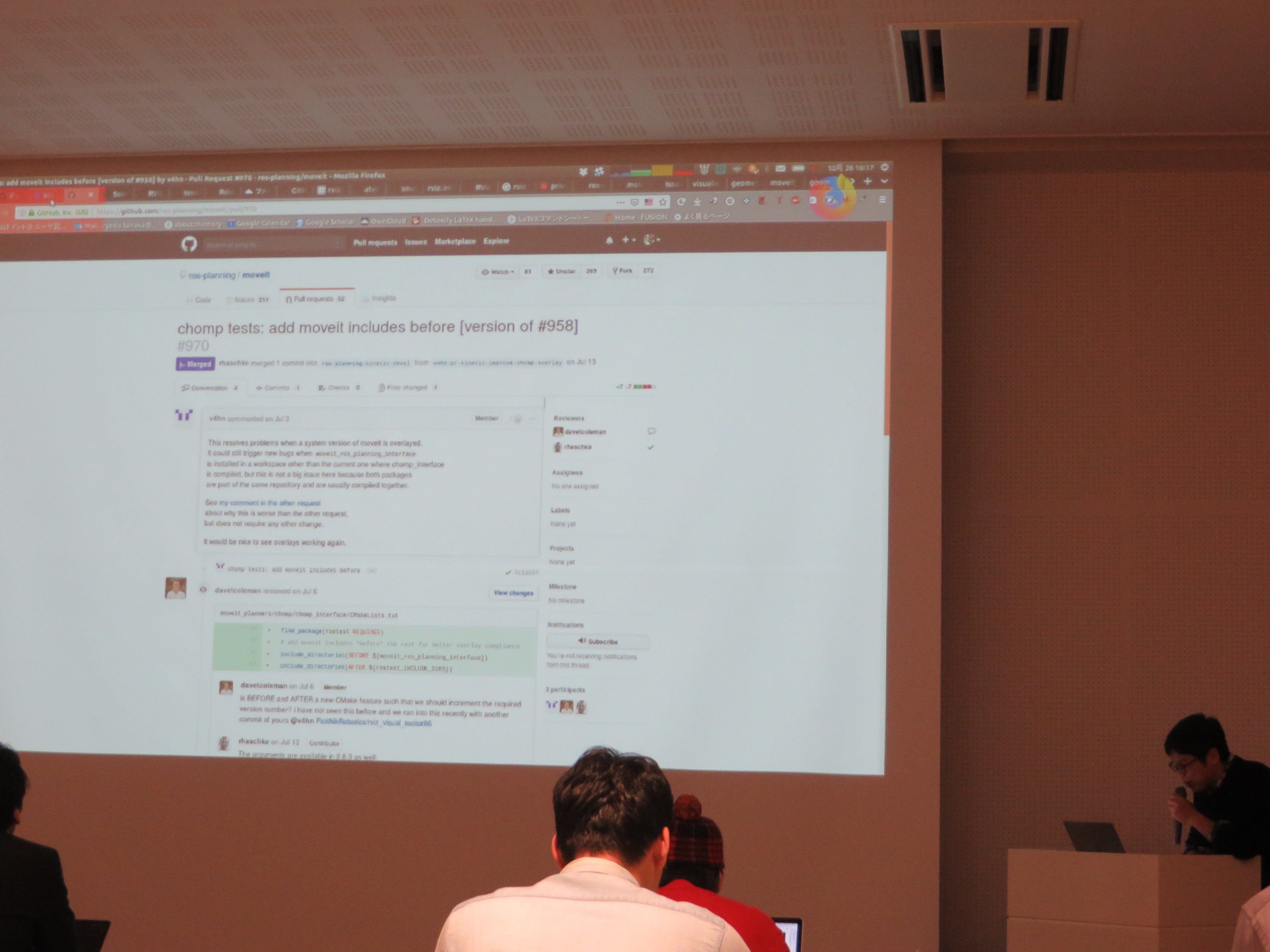
Efforts to Issue (1)
Efforts to Issue (2)

Try using JointTrajectoryPlot on gazebo
There are a lot of efforts to be helpful at the next participation!
It is a commemorative photo!
Thank you very much for all the participants! Let’s meet next year!
ROS Workshop for Beginners on 12th September 2018
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!

ROS Workshop for Beginners on 8th August 2018
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
ROS Workshop for Beginners on 25th July 2018
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
ROS Workshop for Beginners on 17th April 2018
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!

ROS Workshop for beginners in 27th September !
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
The workshop schedule of October is now open!
in October, ROS Workshop Intermediate Course (Navigation) is also open!
It’s blog for beginners studying ROS for the first time. Please refer to it.
Private workshops, other consultations on OSS are also accepted.
Please do not hesitate to contact us!
info [at] opensource-robotics.tokyo.jp

ROS Workshop for Beginners on 30th August
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
ROS Workshop for Beginners on 8th August
TORK has just passed 4th annual mark on August 8th, 2017.
Thank you all for your business with us, and understanding toward the opensource robotics.
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!

ROS Workshop for Beginners on 2nd August
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
Amazing montage video incl. NEXTAGE OPEN celebrates MoveIt! 5-year
MoveIt!, de-facto standard motion planning library for ROS, now celebrates 5th year since its initial release by an amazing compilation of application videos.
This is the 2nd time MoveIt! maintenance team makes such a montage. Comparing with the one from 4 years ago back in 2013 soon after the software was just released, we can see many more Pick&Place applications this time.
Also captured my personal interest was that there are some mobile base/subsea rover manipulation apps, which is one of the future improvement items of MoveIt! (see this page “Mobile base integration”). It’d be absolutely a great contribution if the developers of those apps would give back their development to the upstream MoveIt! software.
As has always been, NEXTAGE Open, a dual-arm robot that TORK has been actively contributing to its maintenance and providing support service, appears in the video as well thanks to a Spanish system integrator Tecnalia presumably for their work with Airbus.
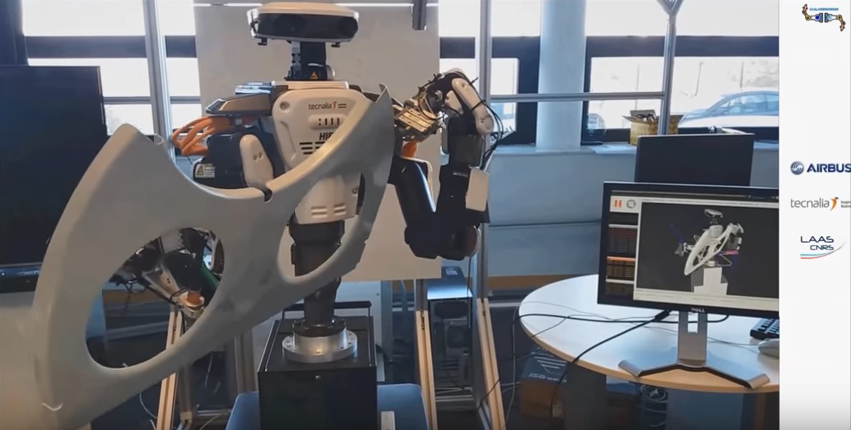
Hironx in motion from MoveIt! 5-year montage by courtesy of Tecnalia
TORK has been a motivated, skillful supporter of ROS and MoveIt! since our launch in 2013. If you’re wondering how you could employ MoveIt! to your robot, please consider our hands-on workshop series too.
P.S. List of all application’s developers are also available as follows:
(0:06) Delft Robotics and TU Delft Robotics Institute
(0:09) Techman Robot Inc.
(0:13) Correll Lab, CU Boulder
(0:37) Nuclear & Applied Robotics Group, Unv Texas
(0:50) Beta Robots
(0:55) GIRONA UNDERWATER VISION AND ROBOTICS
(1:03) Team VIGIR
(1:34) Honeybee Robotics
(1:49) ROBOTIS
(1:58) TECNALIA
(2:05) Correll Lab, CU Boulder
(2:26) TODO Driving under green blocks
(2:38) ROBOTIS
(2:54) Fetch Robotics
(3:05) Hochschule Ravensburg-Weingarten
(3:12) TU Darmstadt and Taurob GmbH – Team ARGONAUTS
(3:20) isys vision
(3:27) Technical Aspects of Multimodal System Group / Hamburg University
(3:33) Clearpath Robotics
(3:43) Shadow Robot