World MoveIt! Day 2018 in Kashiwa-no-ha was held
World MoveIt! Day 2018 in Kashiwa-no-ha was held last Friday! I will introduce the state of the day by photograph. I hope to share the atmosphere with who could not participate.
State before opening

We are ready for start!
Opening
Finally the World MoveIt! Day 2018 in Kashiwa-no-ha started! There was explanation about an example of challenge at the hackathon.
TORK Tajima’s greeting
Next, there was an introduction of the robot from the company that exhibited the robot at the venue.

Sawyer

An announcement by SEED Solutions

Presentation by Fuji Soft
Hackathon (morning) starts!
Everyone is working muzzle. There were some people who tried the program on actual machines.

Hackathon’s appearance
Lunch
Good work every morning! It is lunch time.

The lunch we offered from Omron Sinic X Co., Ltd. was very delicious.

So yummy.
Presentation by participants
Presentation by participants began while eating lunch.
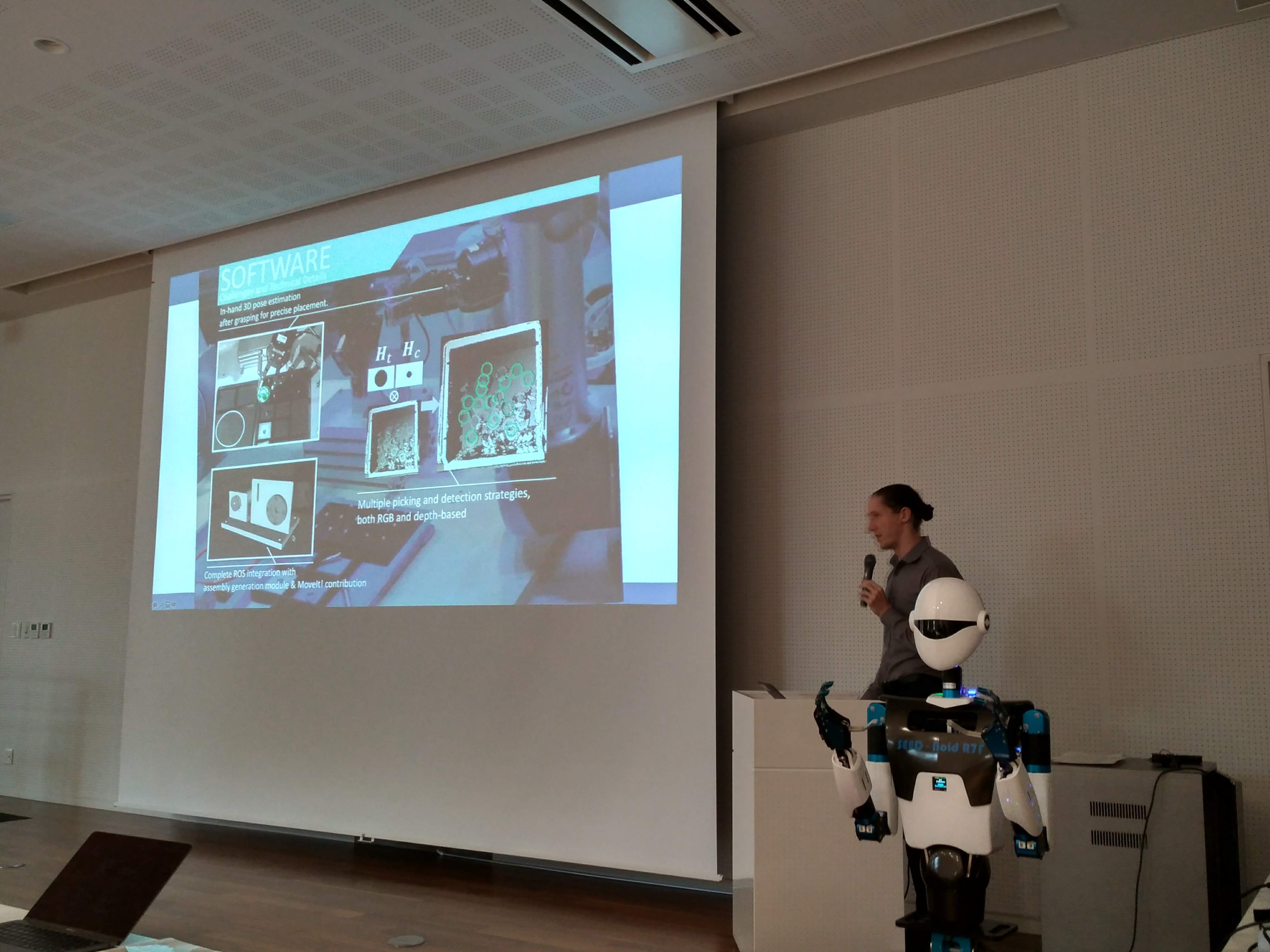
OMRON SINIC X Corporation @felixvd
An introduction of WRS2018 product assembly challenge participation report was given by Omron Sinic X Co., Ltd.

About MoveIt! Task Planning @ youtalk
He introduced about the new function of MoveIt! Task Constructor. This seems to enable parallel tasks such as moving while grabbing things that we could not do currently.
SEED-noid Introduction Mr. Kondo
The practical example of SEED-noid given by Seed Solutions, through the story of demonstration experiment at a competition set in a convenience store and a restaurant.
Introduction of JointTrajectoryPlot Taoka (TORK)
It is an introduction of useful tools when you want to know the angle of each joint when moving the robot with MoveIt!
Hackathon (afternoon) starts!
When the presentation is over, Hackathon is resuming.

As in the morning, quiet and calm time flows.
Achievement presentation
Thank you for your hard work! Hackathon is over. Time to present we worked on today all day.
Hold Kamehame-ha gesture with SEED-Noid Mover (Use MoveIt! On actual machine)

Move the new robot’s product with gazebo using MoveIt! (ROBOTIS-sama)

Add information on new robot products to MoveIt!’s homepage
To simplify collision calculation with MoveIt!, Simplify the robot’s mesh model
Efforts to Issue (1)
Efforts to Issue (2)

Try using JointTrajectoryPlot on gazebo
There are a lot of efforts to be helpful at the next participation!
It is a commemorative photo!
Thank you very much for all the participants! Let’s meet next year!
ROS Workshop for Beginners on 12th September 2018
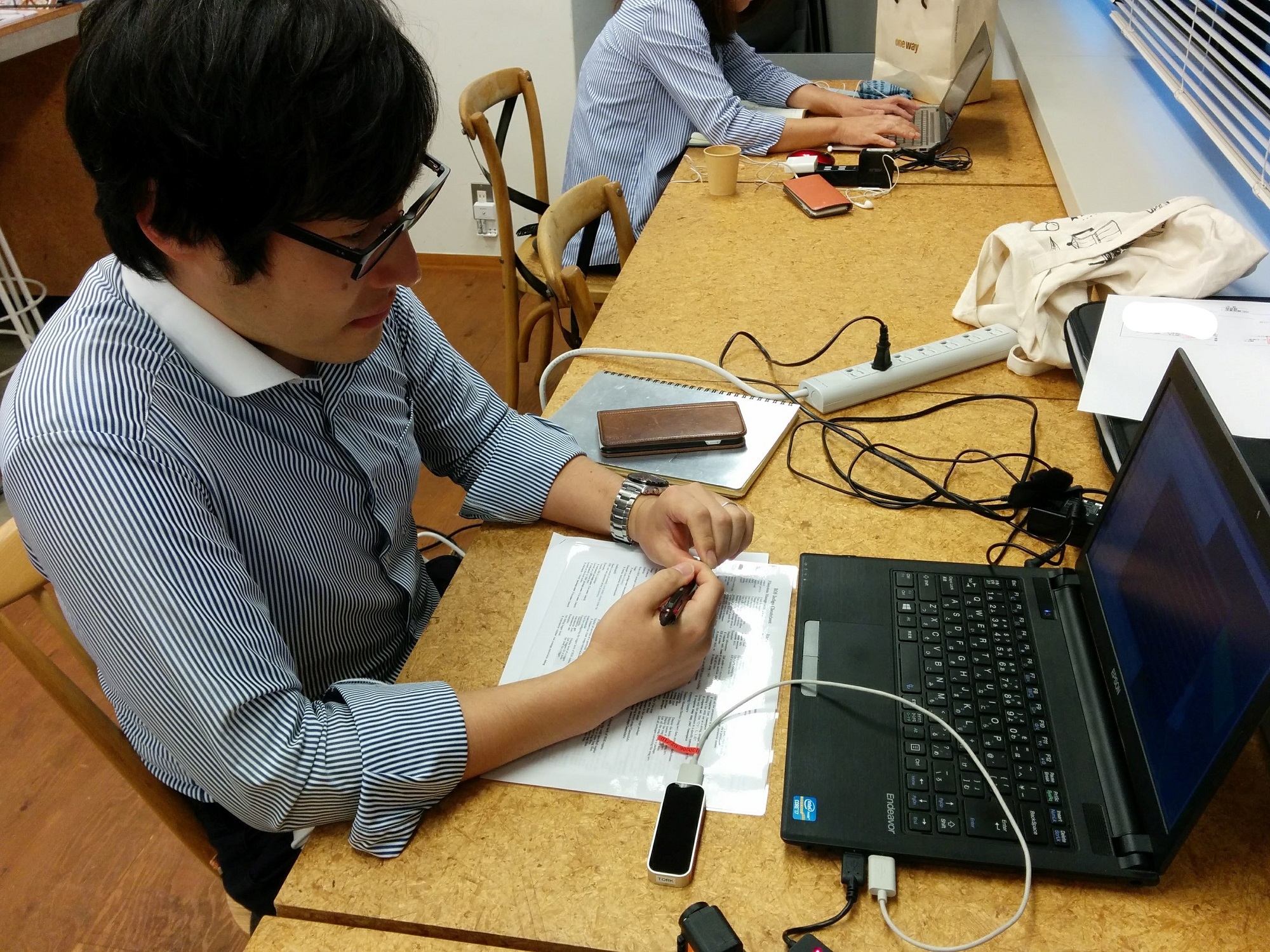
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!

ROS Workshop for Beginners on 8th August 2018
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
ROS Workshop for Beginners on 25th July 2018
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
ROS Workshop for Beginners on 17th April 2018
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!

Low-cost LIDARs!(3) ROS package
ROS compatibility
In the previous post, we look into the specification of these two LIDARs.
RPLIDAR A2 and Sweep have their respective SDKs released, which is possible to use data from our own software. However, if you are using it for a robot, no reason not to use ROS. Here we will look at the ROS compatibility.
In both RPLIDAR and Sweep, the ROS driver code has already been created.
Sweep has not been released yet, so it needs build from source.
RPLIDAR has already been released, it can be installed with apt comand
$ sudo apt install ros-kinetic-rplidar-ros
Activation of sensor
Both can easily retrieve the data with the included launch file and see it with rviz.
RPLIDAR A2:
$ roslaunch rplidar_ros view_rplidar.launch
Sweep:
$ roslaunch sweep_ros view_sweep_pc2.launch
Differences in messages
rolidar_ros outputs the sensor_msgs / LaserScan message.
Sweep_ros, on the other hand , outputs sensor_msgs / PointCloud 2 . This is probably because Sweep’s measurement is not synchronized with rotation, as mentioned before. However, by using scan_tools / pointcloud_to_laserscan , PointCloud2 messages can be converted to LaserScan messages.
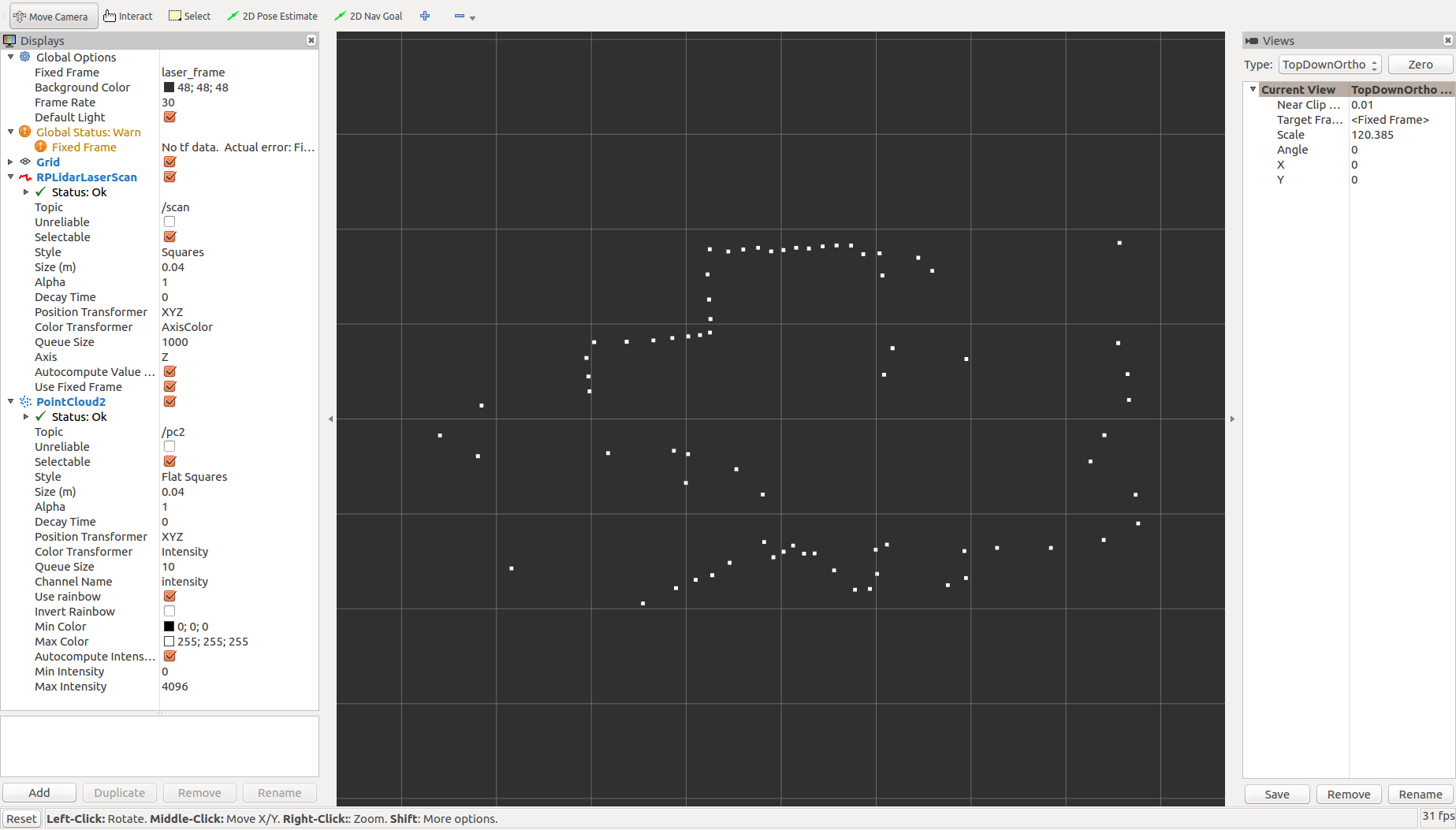
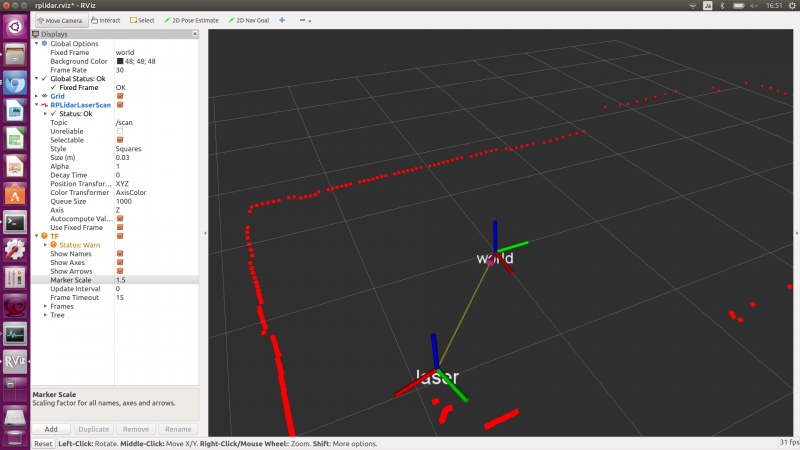
Displayed in Rviz
I tried visualizing data in the same place.
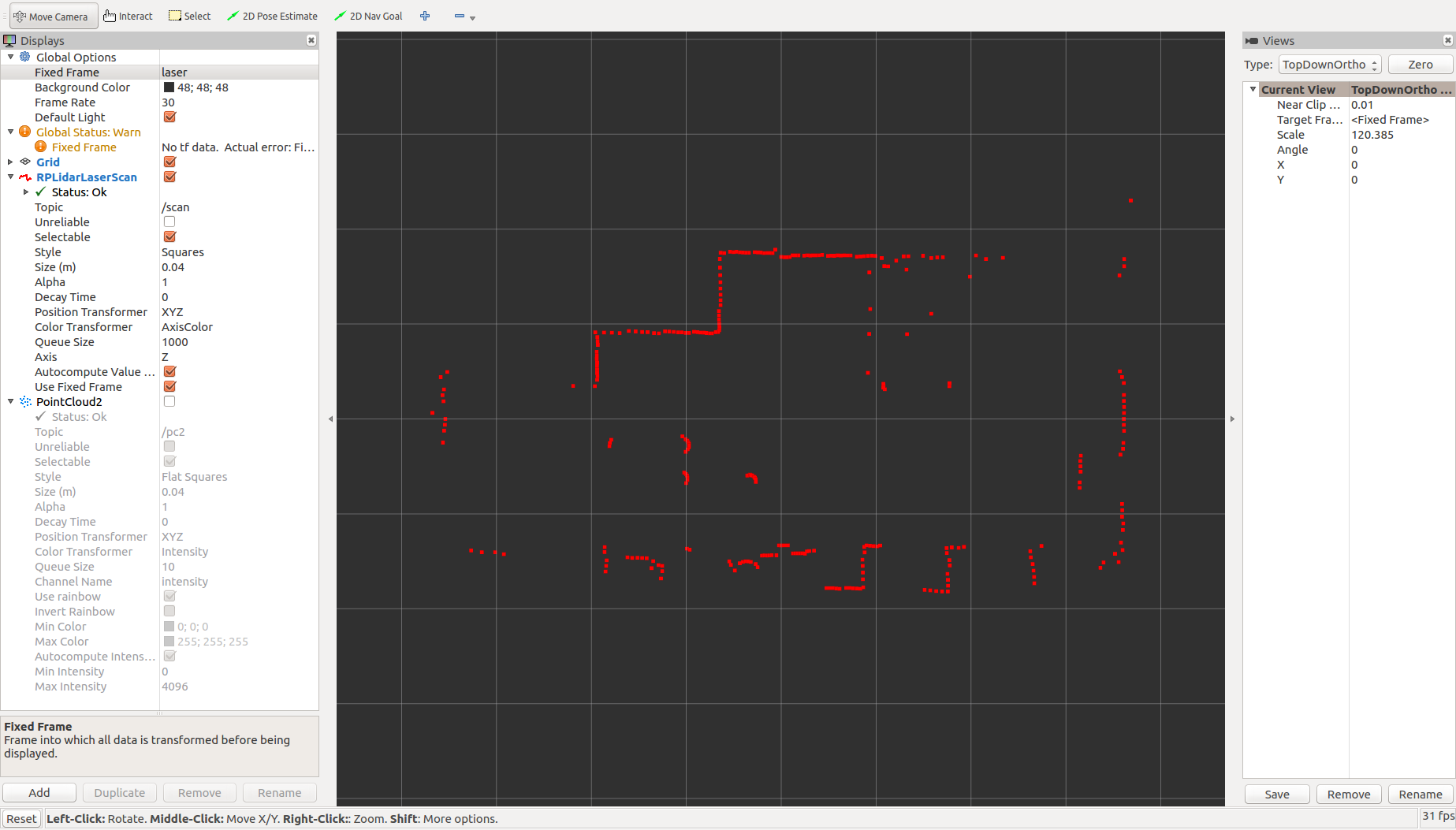
RPLIDAR A2(10Hz)
RPLIDAR A2 is the default setting and you can understand the shape of the room. We also confirmed that it can be used enough for map generation and autonomous movement of robots .
Sweep rotating at the same 10 Hz in the default state is here.
Sweep(10Hz, sample_rate=500Hz)
Well, after all, at the same speed, the roughness of Sweep stands out. But it seems to me that the resolution is too low.
I noticed that the default sample rate of the sweep_ros node was half of the maximum specification (1 kHz) at 500 Hz . I would like to have the maximum performance by default, but we can set sample_rate parameter to 1000 and tried again.

Sweep (10Hz, sample_rate=1kHz)
The detail level has improved much. However, compared to RPLIDAR A2, the shape of the room is hard to understand.
Continue trying to lower the scan (rotating) speed to 3 Hz.
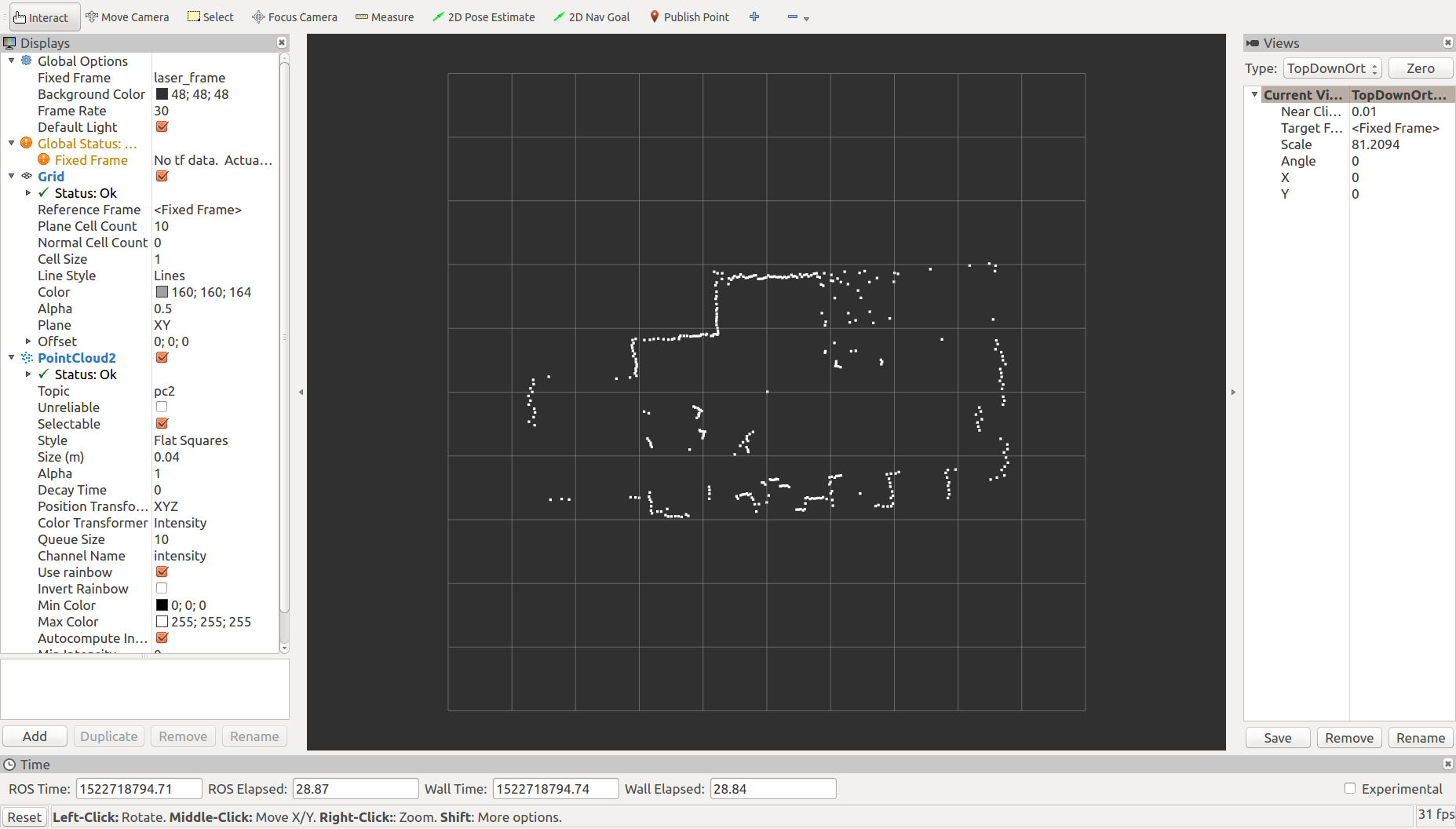
Sweep (3Hz, sample_rate=1kHz)
I can understand the shape of the room this time. The renewal cycle is about three times longer than RPLIDAR A2, as the rotation speed has decreased.
ROS Workshop on Navigation was held in Nagoya

in Nagoya Fushimi
The ROS workshop: intermediate autonomous navigation was held in Nagoya. Participant is already mastering the basis of ROS, so we were able to advance the curriculum smoothly.
Experience of the autonomous navigation
In the autonomous navigation workshop, firstly we got to try the functions of the navigation on simulation. Next, Roomba-based teaching materials robot Roomblock was hired to operate in the room and corridor of the office, making map, navigating autonomously. Then we can learn the configuration of the navigation packages in ROS system. Questions about ROS and robotics other than the curriculum will be answered as much as possible.
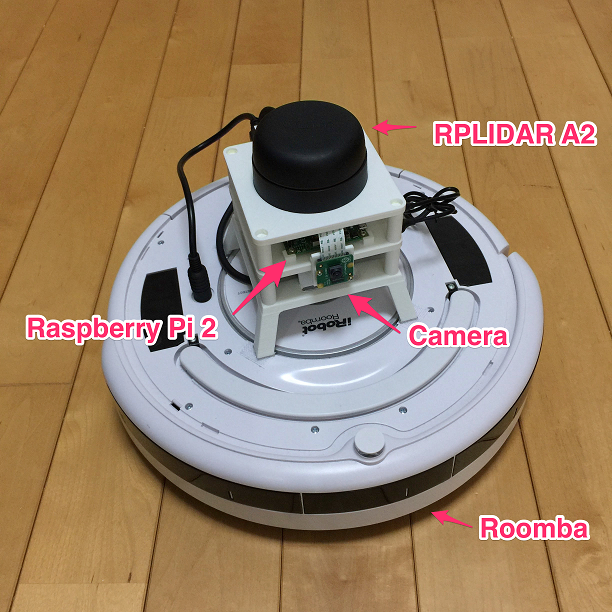
Autonomous mobile robot Roomblock
The public workshop schedule in November !
Also it has published a blog to the first study to people the ROS. Please see for your reference.
Private workshops, we also offer consultation for other OSS.
Please feel free to contact us!
info [at] opensource-robotics.tokyo.jp
ROS Workshop for beginners in 27th September !
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
The workshop schedule of October is now open!
in October, ROS Workshop Intermediate Course (Navigation) is also open!
It’s blog for beginners studying ROS for the first time. Please refer to it.
Private workshops, other consultations on OSS are also accepted.
Please do not hesitate to contact us!
info [at] opensource-robotics.tokyo.jp

ROS Workshop for Beginners on 30th August
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!

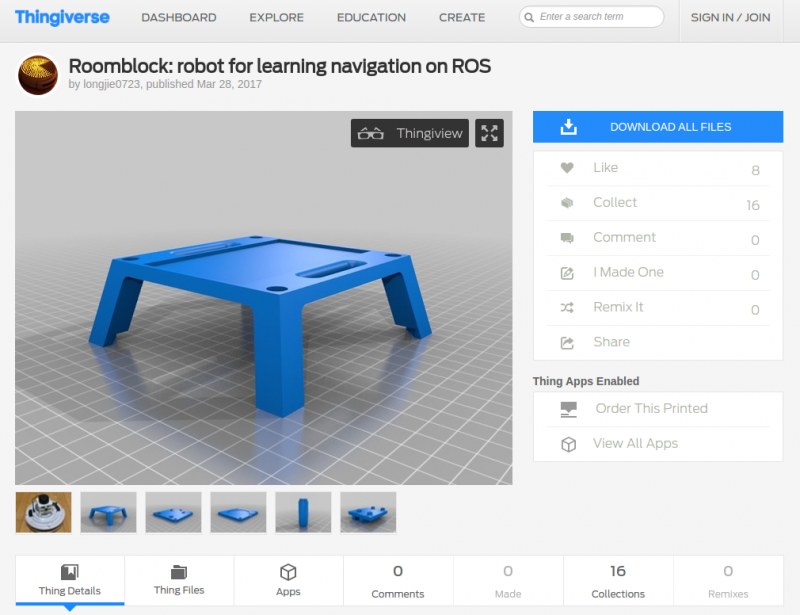
Roomblock(5) : 3D Printable Frame Structure
Roomblock has Raspberry Pi, Mobile battery and RPLIDAR on a Roomba as described in the previous post. We need to a frame structure to make them bind.
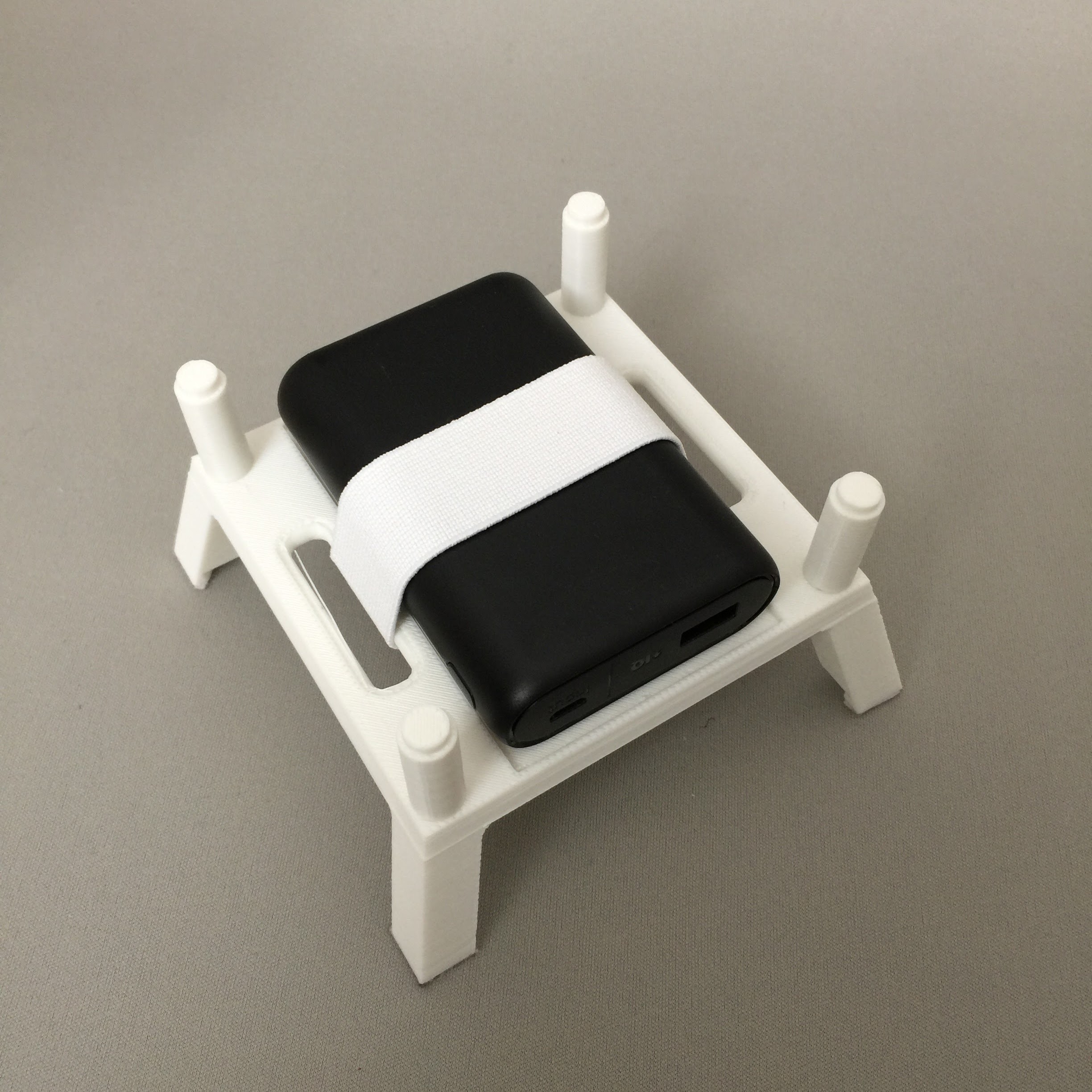
Battery stage
The frame is a extendable shelf-like structure. It consists of the first battery stage, second Raspberry Pi stage, and the top RPLIDAR stage.

Raspberry Pi stage
We named this robot Roomblock, because it is extendable like “blocks”.

Roomblock’s frame
We publish the STL file for 3D printing, so that you can print it out with your own 3D printer. Please check the Thingiverse site.
We share how to build Roomblock at Instructables. Please try it at your own risk.
ROS Workshop for Beginners on 8th August
TORK has just passed 4th annual mark on August 8th, 2017.
Thank you all for your business with us, and understanding toward the opensource robotics.
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!

ROS Workshop for Beginners on 2nd August
We had ROS Workshop at Yurakucho, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
Amazing montage video incl. NEXTAGE OPEN celebrates MoveIt! 5-year
MoveIt!, de-facto standard motion planning library for ROS, now celebrates 5th year since its initial release by an amazing compilation of application videos.
This is the 2nd time MoveIt! maintenance team makes such a montage. Comparing with the one from 4 years ago back in 2013 soon after the software was just released, we can see many more Pick&Place applications this time.
Also captured my personal interest was that there are some mobile base/subsea rover manipulation apps, which is one of the future improvement items of MoveIt! (see this page “Mobile base integration”). It’d be absolutely a great contribution if the developers of those apps would give back their development to the upstream MoveIt! software.
As has always been, NEXTAGE Open, a dual-arm robot that TORK has been actively contributing to its maintenance and providing support service, appears in the video as well thanks to a Spanish system integrator Tecnalia presumably for their work with Airbus.
Hironx in motion from MoveIt! 5-year montage by courtesy of Tecnalia
TORK has been a motivated, skillful supporter of ROS and MoveIt! since our launch in 2013. If you’re wondering how you could employ MoveIt! to your robot, please consider our hands-on workshop series too.
P.S. List of all application’s developers are also available as follows:
(0:06) Delft Robotics and TU Delft Robotics Institute
(0:09) Techman Robot Inc.
(0:13) Correll Lab, CU Boulder
(0:37) Nuclear & Applied Robotics Group, Unv Texas
(0:50) Beta Robots
(0:55) GIRONA UNDERWATER VISION AND ROBOTICS
(1:03) Team VIGIR
(1:34) Honeybee Robotics
(1:49) ROBOTIS
(1:58) TECNALIA
(2:05) Correll Lab, CU Boulder
(2:26) TODO Driving under green blocks
(2:38) ROBOTIS
(2:54) Fetch Robotics
(3:05) Hochschule Ravensburg-Weingarten
(3:12) TU Darmstadt and Taurob GmbH – Team ARGONAUTS
(3:20) isys vision
(3:27) Technical Aspects of Multimodal System Group / Hamburg University
(3:33) Clearpath Robotics
(3:43) Shadow Robot
ROS + Snappy Ubuntu Core (1) : What is it?
What are the challenges to introduce the market infrastructure of applications such as iPhone’s AppStore and Android’s Google Plain into the world of robots? ROS has been looking into the “Robot App Store” since its inception, but it has not yet been realized.
Among them, the recent appearance of a mechanism called Ubuntu Snappy Core seems to greatly contribute to the opening of the Robot App Store.

I’d like to write about Ubuntu Snappy Core and ROS in the several future entries.
The circumstances of Ubuntu
Ubuntu, on which ROS depends as the main base operating system, has two Regular releases twice a year, and its support period is nine months. There is also a release called LTS (Long Term Support) every two years, and the support period is five years. People seeking practical use continue to use the stable LTS while adopting the latest technology and using the Regular release for the new development.
However, devices targeted by Ubuntu are spreading not only to desktop PCs and servers but also to edge devices such as IoT and routers. Unfortunately, Ubuntu Phone would not come out…
For these devices, from the security point of view, it is not a synchronous one like Ubuntu, but continuous updates of more irregular and finer intervals are indispensable. In addition, fault tolerance, such as rolling back when software containing defects is delivered, is required.
Snappy Ubuntu Core
In response to these demands, Ubuntu has developed a mechanism called (Snappy) Ubuntu Core for IoT and edge devices.
This is to separate the OS and device drivers, separate the kernel and the application, and make it possible to update each independently, in a fine cycle.
The circumstances of ROS
Robots can also be seen as a kind of IoT and edge devices, so in the future ROS, this Snappy package system may become mainstream. Also, the release system of ROS seems to be getting flawed.
Until now, ROS has done synchronous releases like Ubuntu. However, with the release once a year, it seems too late to adopt the technologies of moving forward. On the other hand, when using ROS for business, priority is given to operation, and it tends to become conservative not to update frequently.
Also, the ROS package depends on many external libraries. Every time the API of the external library is changed, the package of ROS needs to correspond to it. When the specification changes, it is necessary to check the operation after matching the package.
Therefore, every time it is released, more packages are coming off the release. Despite being a necessity and commonly used package, there are cases in which it is not released due to the fact that there is no maintainer to perform the corrective operation, although the fix is necessary for release, or the release is delayed.
If you think about selling robot products with ROS, at the timing of Ubuntu or ROS update, you do not know what kind of specification change or malfunction will be mixed, and it takes huge resources to deal with it.
Based on the above, we anticipate that Snappy ROS systems will become mainstream in the future.
It is reliable that a robot engineer working for Canonical (Mr. Kyle Fazzari) is vigorously disseminating information. The following series of blogs and videos released in April are also must-see.
In the next post, we’ll look into how to create Snappy based ROS package.

Roomblock(4): Low Cost LIDAR: RPLIDAR A2
In the previous post, we explained the Raspberry Pi, which communicate with Roomba.
Roomblock is using a low cost RPLIDAR A2.
This is very easy to use, and low cost.

Range data in rviz
This sensor is ROS-ready. You can view the data by typing one command line.
Scan matching
laser_scan_matcher package help you to estimate sensor’s motion only from the laser scan data by scan matching.
In the next post, we’ll show the 3D Printable frame structure for Roomblock.
We share how to build Roomblock at Instructables. Please try it at your own risk.
Roomblock: Autonomous Robot using Roomba, Raspberry Pi, and RPLIDAR(3)
In the previous post, we introduced ROI connector to communicate with Roomba. Roomblock is controlled by a Raspberry Pi. As you know, Raspberry Pi is low cost ARM based board computer. We use Raspberry Pi 2, Ubuntu and ROS are installed on it.

Raspberry Pi 2
The ROI connector on the Roomba and Roomblock are connected with a USB-serial adapter cable.
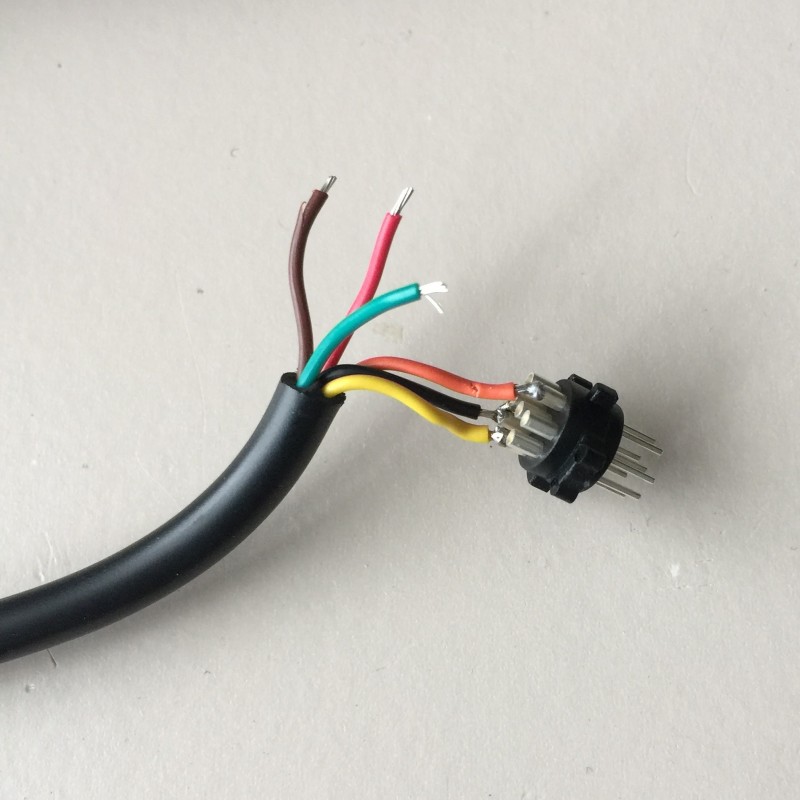

USB-Serial adapter cable

In the next post, we will explain LIDAR for Roomblock.
We share how to build Roomblock at Instructables. Please try it at your own risk.
Roomblock: Autonomous Robot using Roomba, Raspberry Pi, and RPLIDAR (2)
You can use Roomba 500, 600, 700 and 800 series as a base of Roomblock,which we introduced in the previous post. They have a serial port to communicate with external computers. Notice the flagship model Roomba 900 series have no serial port, so you cannot use it.
You can see the serial port as the picture shows. Be careful not to cut your fingers or break your Roomba!


Roomba 500 series ROI connector


Roomba 700 series ROI connector
In the next post, we will show how to connect Raspberry Pi computer and Roomba.
We share how to build Roomblock at Instructables. Please try it at your own risk.

Mapping Experiment in a Large Building
We did very loose evaluation of ROS mapping packages with a relatively large scale building including loop closure. The loop closure is difficult issue for mapping, and it shows some package can close the loop even with the default parameters.
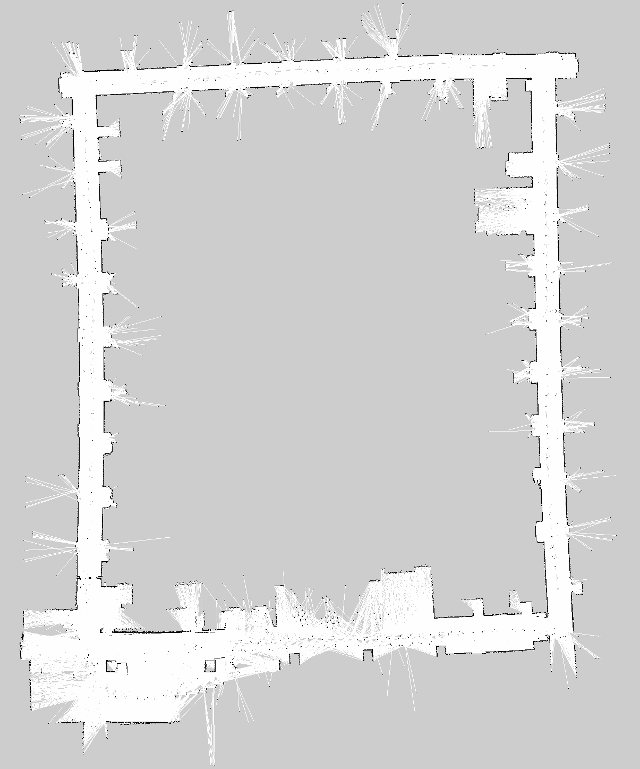
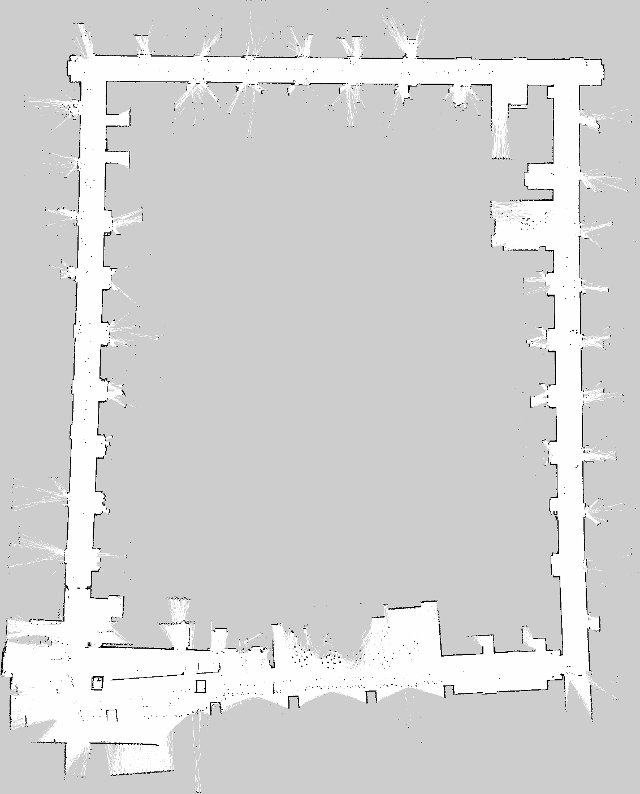
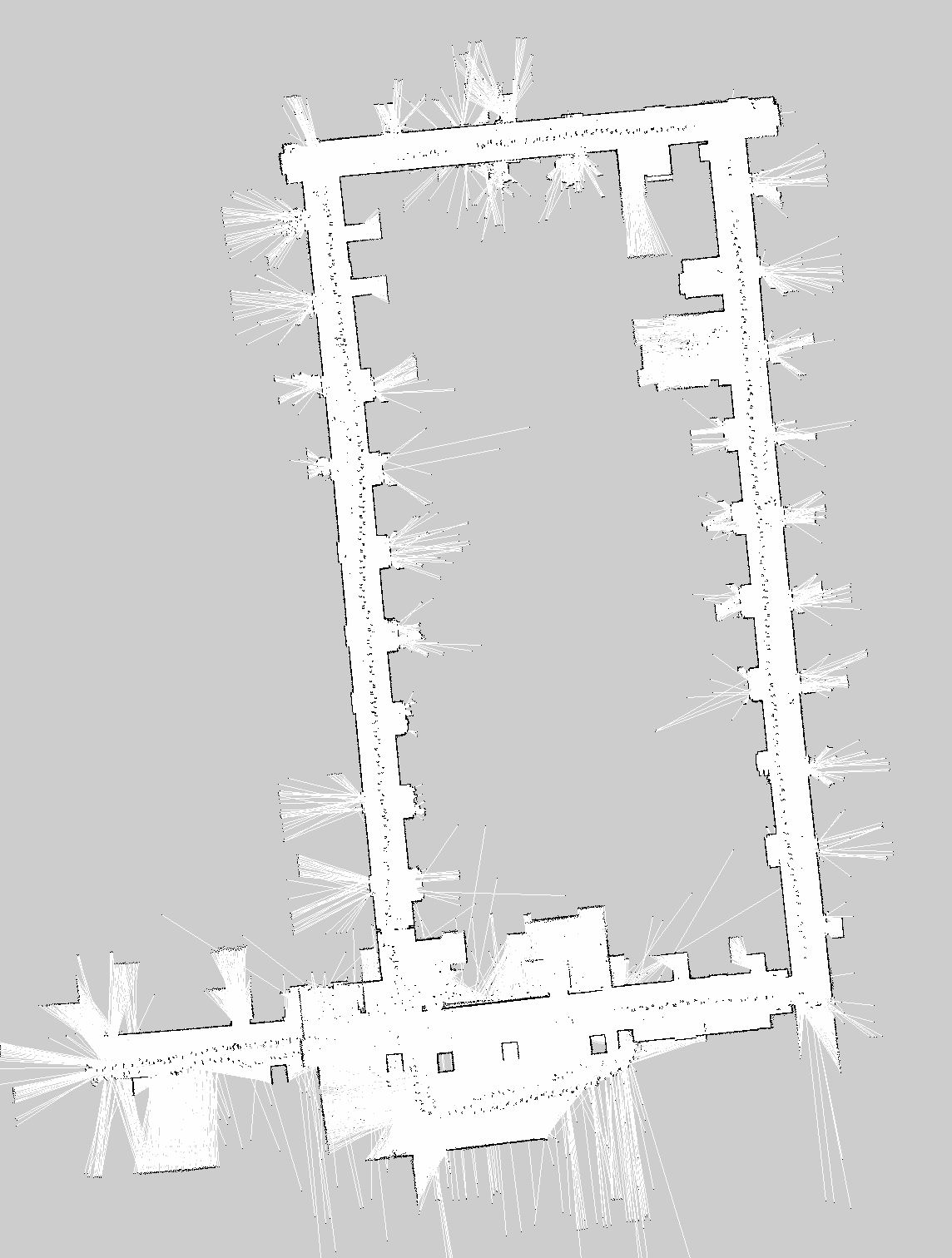
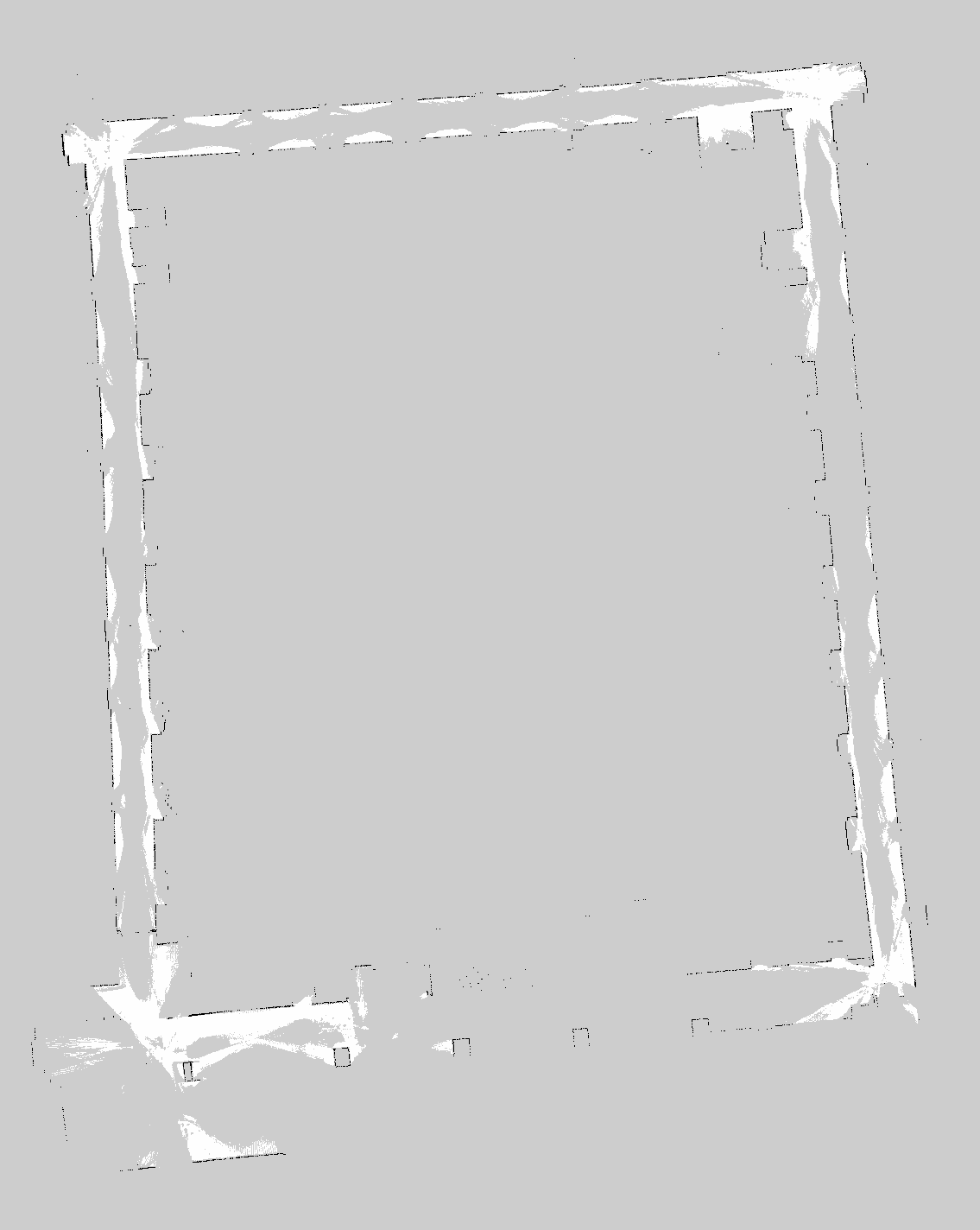
Generated map(from left, gmapping, slam_karto, hector_slam, cartographer)
Notice, this result doesn’t compare true efficiency of each algorithm. We just use nearly default parameters for each package. We recommend you to select mapping packages for your problem by yourself. ROS is suitable for doing it.
Roomblock: Autonomous Robot using Roomba, Raspberry Pi, and RPLIDAR(1)
We are using a robot named “Roomblock” as a material of ROS workshop. Roomba is wonderful not only for room cleaning, but also for learning robotics. Roomba has an serial port to communicate with PC, and of course, ROS system.

You can convince your family to buy a Roomba, of course for cleaning 🙂

The first Roomba I bought in 2007, broken now 🙁
In the next post, we’ll show more about the Serial Port for Roomba to communicate with PC.
We share how to build Roomblock at Instructables. Please try it at your own risk.

Autonomous Navigation Demo and Experiments at Meijo Univ.
We had a chance to perform a demo and experiments of our autonomous navigation robot at Meijo University, Nagoya, Aichi. Our Roomba based autonomous robot “Roomblock” could impress the students. ROS would help them to accelerate their study.


And we can do mapping experiments with the robot in a beautiful campus building. We are going to report the result in following posts.


Updated MoveIt! Now Comes with Trajectory Introspection
Through the package update earlier June 2017, MoveIt! now allows you to introspect planned trajectory pose by pose.
Using the newly added trajectory slider on RViz, you can visually evaluate the waypoints in a planned trajectory on MoveIt!.
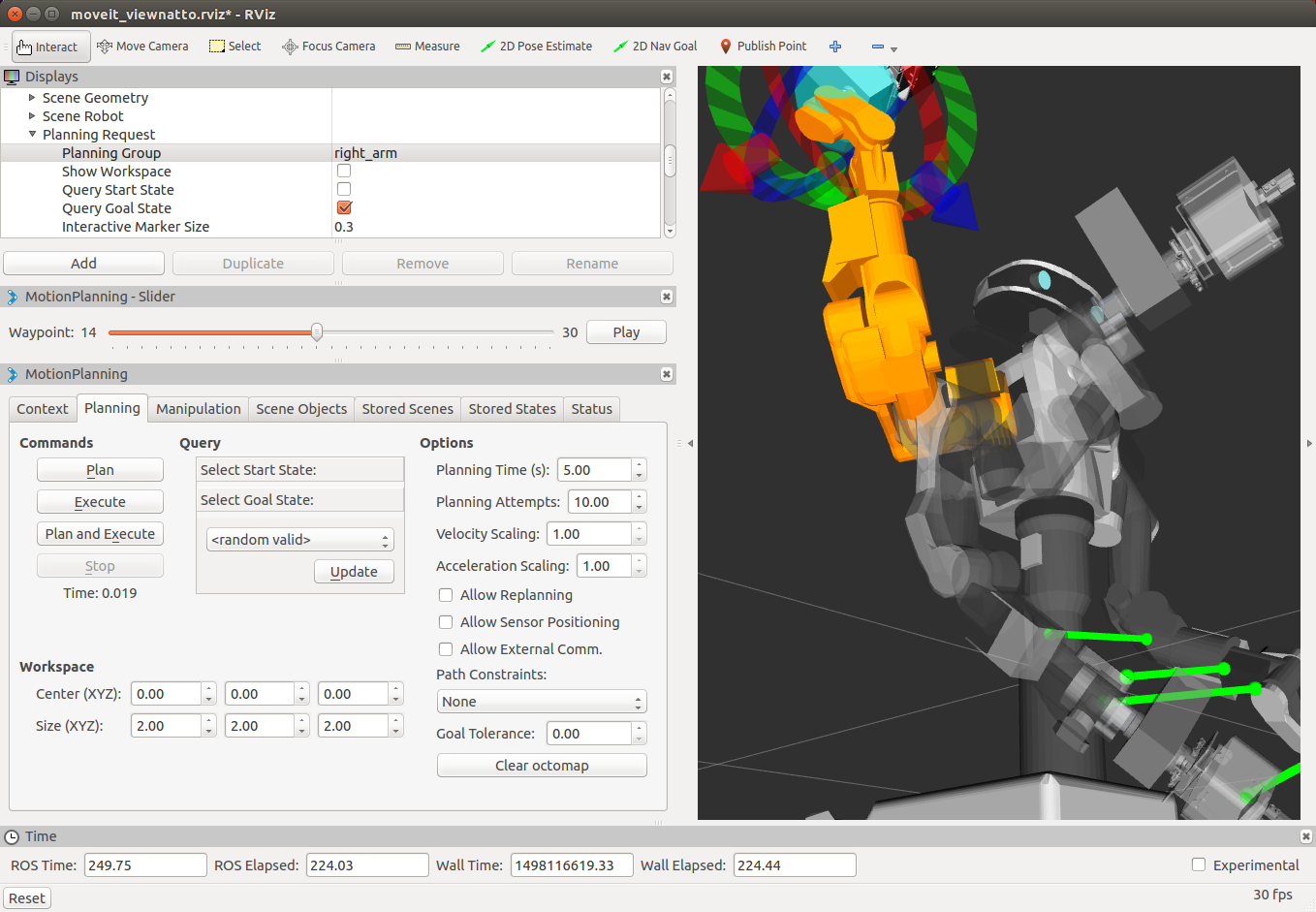
As you see on the slider on the left side, you can now introspect each waypoint in a planned trajectory on MoveIt! on NEXTAGE Open.
See MoveIt! tutorial for how to activate this feature.
Impedance Control using Kawada’s Hironx Dual-arm Robot
Here’s an advanced usecase of NEXTAGE Open (Hironx) robot.
A robot at Manipulation Research Group at AIST (Japan) is equipped with JR3 6-axis force sensor at the tip of the arms. Using the external force measurement from the sensor, impedance control is achieved to restrain the pose of the robot’s end-effector.
Interested users can take a look at this wiki page for how to configure your driver. Technically you can use other types of force sensors.
Need customization? Please contact us.
NEXTAGE OPEN software services progress
With TORK turning 2-year mark on August 8th, 2015, we give an update about the NEXTAGE OPEN’s ROS-based opensource software support, which is one of our first business services.
We’ve got 74 support requests so far from some of the support service users. Each request is answered, or fixed by us often based on the collaboration with the opensource community developers.
User’s case: Tecnalia
-
- (Spain) has been working toward factory automation project at Airbus, taking advantage of the dexterity and the ability for collaboration with humans that dual-arm robots provide. Their analysis and the work is reported in an academic paper[1].
Thank you all who have given us a support especially Kawada Industries and Kawada Robotics. Your understanding and generosity nourishes the opensource robotics.

(Photo: at 4th ROS Japan User Group meetup. Since NEXTAGE OPEN software comes with ROS-based simulation as well, whoever interested can give it a try, bring about meetup sessions like this using it.
TORK speaks about opensource robotics research and business at RSJ Seminar (09/11/2015)
Two of the board members at TORK will speak at a day-long seminar entitled “Opensource Software in Robotics, and its real- world examples” hosted by RSJ (Robotics Society of Japan) in September, 2015.
The following is some of the info cited from its official web page [Link to RSJ top page](where registration can be made as well). Reportedly watching the talks online-realtime will be possible on a request-basis.
- Seminar Language: Japanese
- Date: 9/11/2015 F 9:50-16:40 (entrance 9:20)
- Remote: Paid webinar style will be available. Registration opens in early August.
- Venue: Chuo University, Korakuen campus Bld.5 Rm.5134 (1-13-27 Kasuga, Bunkyo-ku, Tokyo)
- Speakers (translation by TORK)
- #1 10:00-11:00 Kei Okada (U. Tokyo) Current and the Future of Opensource Robotics Software in Research
- #2 11:10-12:10 Yoshitaka Hara (CIT) ROS-based autonomous robot for outdoor pedestrian space
- #3 13:10-14:10 Koichi Nagashima (Kawada Robotics Inc.) Humanoid research robot
- #4 14:20-15:20 Isaac I.Y. Saito (TORK) Facilitation of Opensource Robotics Software in Industry, and its future
- #5 15:30-16:30 Minoru Yamauchi (Toyota Motors Corporation) Toyota Partner Robot
We haven’t found English information for this session yet. If interested, we (TORK) might be able to provide assistance, so drop in a line at info[a-t]opensource-robotics.tokyo.jp