
Roomblock(5): 3Dプリンタで出力可能なフレーム構造
前回までにルンバ,ラズベリーパイ,モバイルバッテリ,そしてレーザー距離センサといったRoomblockの部品を紹介しました.これらをルンバの上に載せるための,3Dプリンタで出力できる構造材を紹介します.
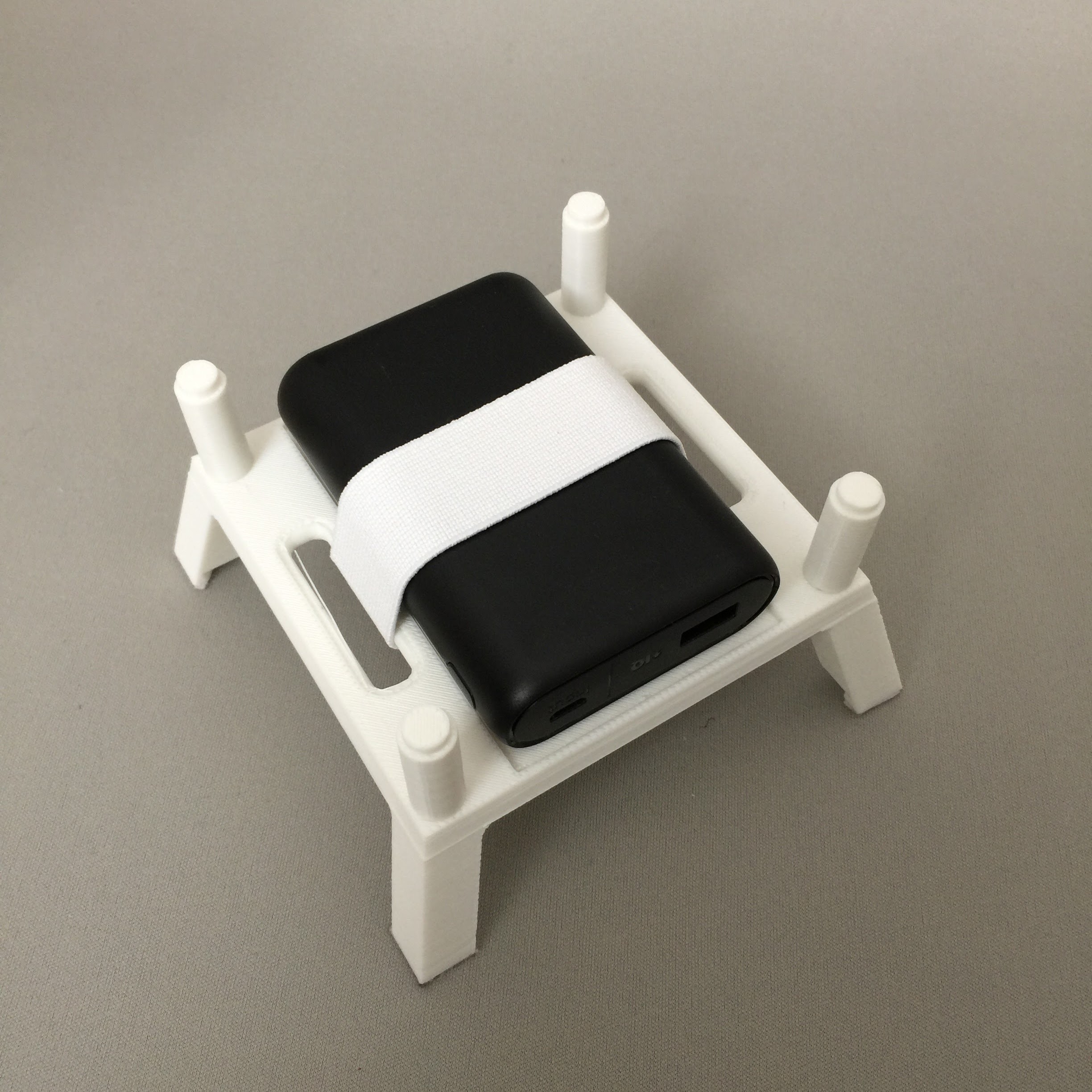
Battery stage
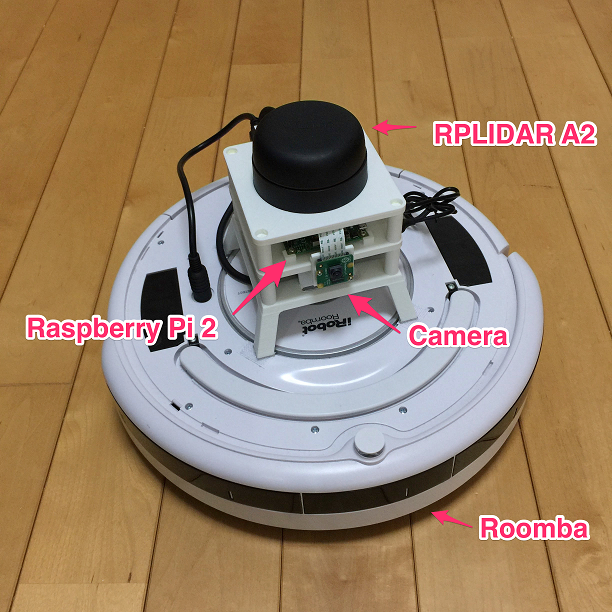
棚のような構造で,1番下の段にモバイルバッテリ,2番目の段にラズベリーパイ,1番上の段にRPLIDAR A2を載せます.動作中にモバイルバッテリが落ちてしまうことがあるので,1番下の段にはバッテリー固定用のベルトがつけられるようになっています.

Raspberry Pi stage
部品をブロックのように交換したり追加したりして,機能を拡張することを狙っているので,”Roomblock”と名付けました.安直ですね.ラズベリーパイ用のボードカメラを固定するための部品も追加しました.

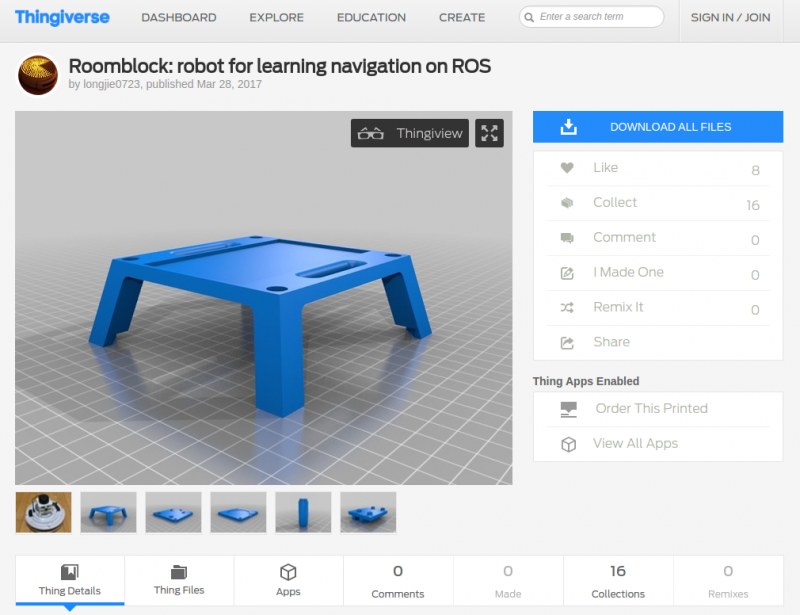
Roomblock’s frame
ルンバとフレーム部分はベルクロテープで固定されているので,取り外しも簡単です.
この構造材は,比較的安価な3Dプリンタでも出力できるサイズで設計されています.確認には UP! plus2を使いましたが,ワークエリアが15cm x 15cm程度の3Dプリンタであれば,大抵の機種で出力できると思います.3Dデータ(STLファイル)は,Thingiverseからダウンロードすることができます.
Roomblockの詳細な作り方については,Instructablesで公開しています.ただし当社は,これらの内容によって生じるいかなる損害についても責任を負いません.興味がわいた方はあくまで自己責任で,チャレンジしてくださいね.

Roomblock(4): 低価格なレーザ距離計 RPLIDAR A2
前回はルンバと通信するための計算機として用いているラズベリーパイについて紹介しました.今回は,自律移動のためのキーパーツである,レーザ距離センサについて紹介します.レーザースキャナ,LIDAR(Laser Imaging Detection And Ranging)とも呼ばれます.
弱いレーザービームを発光し,物体への反射光を計測して,その時間差により物体までの距離を測ります.計測部分を回転させながら計測(スキャン)すれば,平面内の物体までの距離が計測できます.レーザービームを複数並べたり,細かく向きを変える機構を使うことで,平面内だけでなく3次元的な計測点が得られる3次元レーザ距離センサもあります.
一般的にレーザー距離センサは,2次元のものでも数十万円していたので,そう手軽に使えるものではありませんでした.しかしRoomblockで使っている SlamTech社のRPLIDAR A2 は,なんと5万円程度と破格なのです.
自律移動のキーパーツ,LIDAR
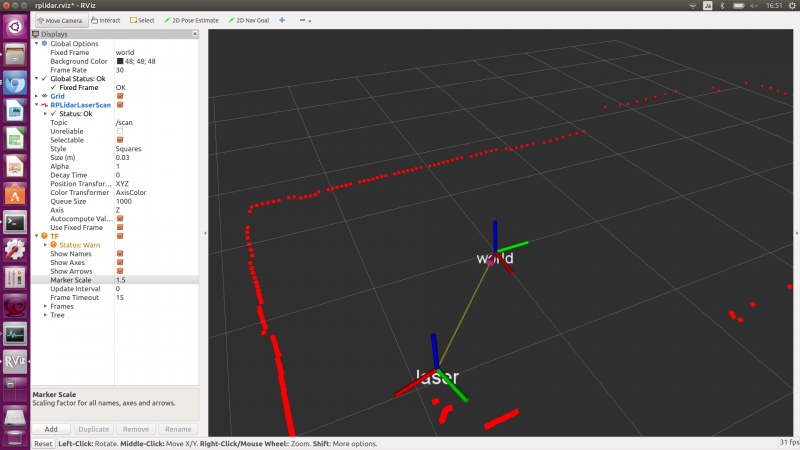
RPLIDAR用のROSドライバが公開されています.
$ sudo apt install ros-kinetic-rplidar-ros
として,
$ roslaunch rplidar_ros view_rplidar.launch
とするだけで,rvizで計測した点が表示されるお手軽さです.

rvizで表示した距離データ
計測可能距離は16m, 更新周期は10Hzと,高価なレーザスキャナと比べて性能では劣るものの,通常の屋内であれば地図生成や自己位置推定に問題はありません.スキャンは1度刻みで360度なので死角がありませんが,センサ上部がむき出しのままぐるぐると回転するので,動作中に触ってしまわないように注意が必要です.インターフェースはUSB2.0で,バスパワー駆動なのもうれしいところです.
laser_scan_matcherパッケージで少し遊んでみましょう.
$ roslaunch rplidar_ros view_rplidar.launch
としてセンサを起動した後,
$ rosrun laser_scan_matcher laser_scan_matcher_node _base_frame:=laser
として,センサの水平を保ちながら,ゆっくりと動かしてみます.
スキャンマッチングの様子
初期状態ではworld座標系と一致していたlaser座標系が,センサの動きに応じて位置と姿勢がレーザのスキャンマッチングにより更新されていきます.センサを元の位置,姿勢に戻すと,だいたいworld座標系に一致しています.ただ,レーザのスキャンマッチングでは,フレーム間の移動量を推定してこれを積算するので,長く移動させるとエラーも積算されていきます.これを避けるためには,より高度な自己位置推定のアルゴリズムが必要になります.
次回はこれらの部品をルンバにのせるフレームを3Dプリンタで出力します.
Roomblockの詳細な作り方については,Instructablesで公開しています.ただし当社は,これらの内容によって生じるいかなる損害についても責任を負いません.興味がわいた方はあくまで自己責任で,チャレンジしてくださいね.
ルンバとラズベリーパイとレーザ距離センサによる自律移動ロボット Roomblock(3)
前回はルンバと通信するためのROIコネクタについて紹介しました.今回はルンバと通信するための計算機として用いている,ラズベリーパイ(Raspberry Pi)について書きます.
ラズベリーパイについては改めて言うまでもないかもしれませんが,低価格なARM搭載のボードコンピュータです.Roomblockで用いているのはラズベリーパイ2です.通常のPCと同じように,Ubuntuをインストールしたあと,ROSをインストールすることができます.

Raspberry Pi 2
ルンバのROIコネクタとラズベリーパイは,USB-シリアル変換器を使って接続します.変換器を内蔵したケーブル(秋月電子で購入できます)を使うと,ミニDINコネクタとはんだ付けするだけで写真のようなケーブルが出来上がります.Roomblockで唯一のはんだ付けが必要な部品ですが,3,4箇所をはんだ付けするだけなのでそれほど難しくないと思います.
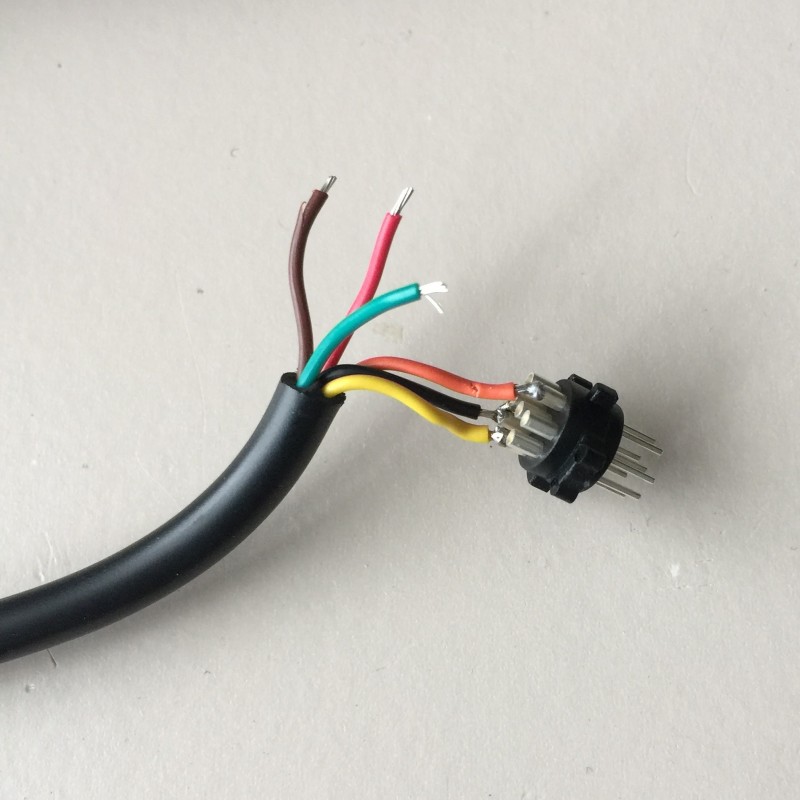

USB-シリアル変換ケーブル
ラズベリーパイの電源はどうしましょうか?ルンバのROIポートにも電源が出ているのですが,これはルンバのバッテリの電圧がそのまま出ているので,使う場合には電圧の変換が必要になってしまいます.Roomblockでは市販のUSBモバイルバッテリーを別電源として使用することにしました.10000mAのものが3000円程度で購入できる,良い時代になりました…これでラズベリーパイを数時間は動作させることができます.

今回はここまでです.次はレーザースキャナについて紹介します.
Roomblockの詳細な作り方については,Instructablesで公開しています.ただし当社は,これらの内容によって生じるいかなる損害についても責任を負いません.興味がわいた方はあくまで自己責任で,チャレンジしてくださいね.
ルンバとラズベリーパイとレーザ距離センサによる自律移動ロボット Roomblock(2)
前回紹介したRoomblockに使えるルンバは,500, 600, 700, 800 シリーズと呼ばれるものです.これらの機種は,外部と通信するためのシリアルポートを備えています.ただし,現在の最上位機種のルンバ900シリーズは,画像による地図生成までできるすごいものですが,シリアルポートを備えていないのでRoomblockのベースとしては使用できないので注意してください.
ところでそのシリアルポートはルンバのどこにあるのでしょう?シリーズにより位置が異なります.500シリーズ,600シリーズは,上面のカバーを外さなければなりません.このカバーは4か所のツメで固定されていて,最初は少し硬いので外すのに力が必要です.ケガや破損に十分注意してください.


Roomba 500シリーズのROIコネクタ
700シリーズ,800シリーズは,ルンバ上面の取っ手の下にROIコネクタがあります.カバーを外す必要はなく,取っ手を持ち上げるだけでアクセスできます.


Roomba 700シリーズのROIコネクタ
Roomblockの詳細な作り方については,Instructablesで公開しています.ただし当社は,これらの内容によって生じるいかなる損害についても責任を負いません.興味がわいた方はあくまで自己責任で,チャレンジしてくださいね.

Roomblock: ループを含む大きな建物での地図生成
名城大学構内で実験させていただいたデータから,ROSの地図生成パッケージで地図を生成してみました.データはROSのbagファイルとして取得したので,同じデータに対して異なる地図生成パッケージを適用することが可能です.
ROSの地図生成のパッケージとして,
- gmapping
- slam_karto
- hector_slam
- Google cartographer
の4つのパッケージを用います.
これまで家屋や廊下など,比較的狭い環境で地図を作ってきました.それらの環境ではどの地図生成パッケージも,(誤差はともかくとして),自律移動に使えないような大きく矛盾する地図を作成することはありませんでした.狭い部屋では,基本的にレーザセンサのデータをずっとつなぎ合わせ続けることで,部屋の地図を作ることが可能です.
しかし,今回のデータは非常に大きな建物の長方形の廊下を一周したものです.廊下を一周回って元の場所に戻ってきた時,それが元の場所であることを認識せず,そのままレーザセンサのデータをつなぎ合わせていくと,最初に作った地図と矛盾したものを上書きし続けてしまいます.これを避けるためには,現在居る場所が以前来たことのある場所であると認識した上で,地図全体を辻褄があうように生成しなければなりません.これは”loop closure”と呼ばれ,地図生成では非常に難しい問題です.
以下の動画は,4つのパッケージで地図を生成した結果をまとめたものです.地図のグリッドサイズは5cmとし,各パッケージのパラメータのほとんどはパッケージの規定値のままで,一部のパラメータのみ少し調整しました.
gmappingは非常に健闘しました.途中の廊下は真っ直ぐになっておらず,地図の形は後半にかけて不正確になっています.これはルンバのあまり正確でないオドメトリを少し信頼しすぎているようです.しかし,一周回ってきた最後に注目してください.以前来たことのある場所だと認識し,辻褄があうように地図全体を変形させました.矛盾のない,ほぼ正しい地図が出来上がりました.
slam_kartoは,今回はloop closureの検出に失敗してしまいました.一周回ってきた後,最初に作った地図を破壊しながら,新しい地図を上書きしていきます.矛盾した地図となってしまいました.
hector_mappingには,じつはloop closureの機能がありません.また,車輪の回転速度(オドメトリ)を使っていません.そのため,この環境ではうまく地図を作ることはできませんでした.
Google cartographerは最後発で,しかもこのような大規模環境の地図を作るために開発されたアルゴリズムです.やはりループを正しく閉じることに成功しました.
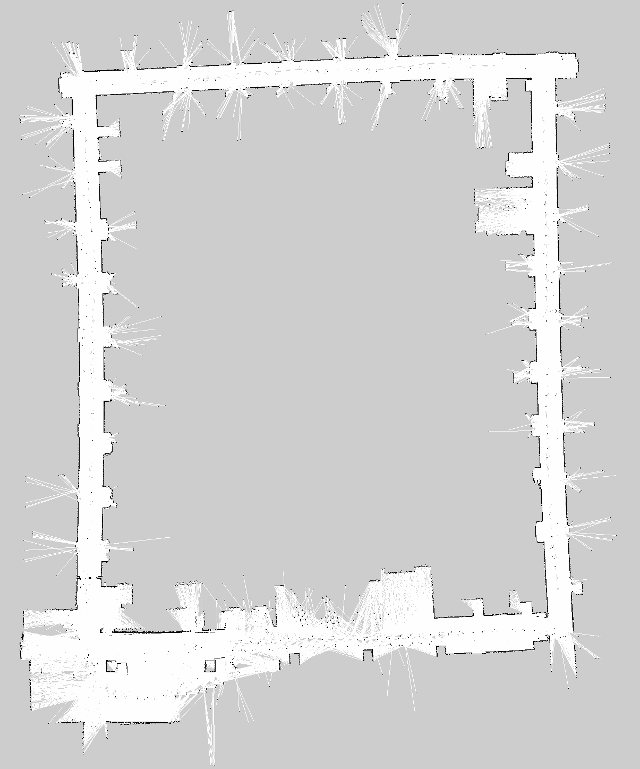
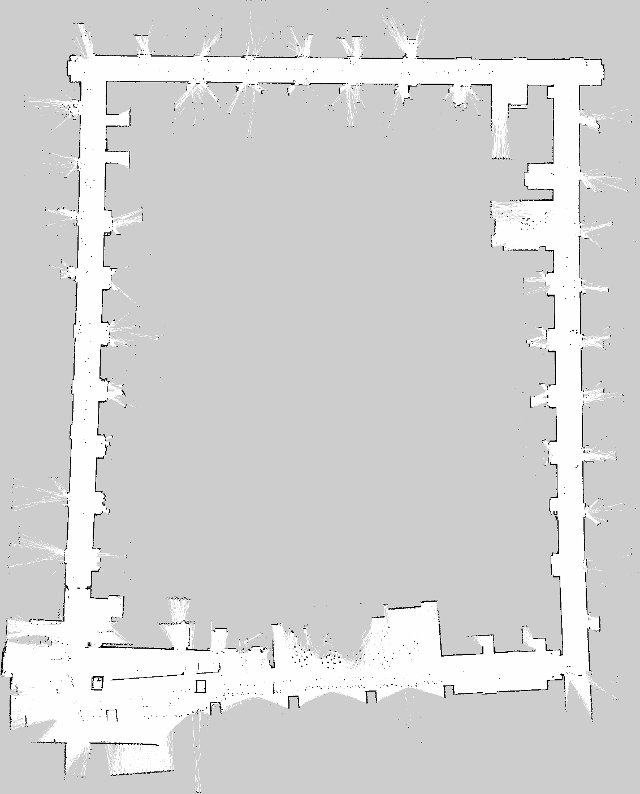
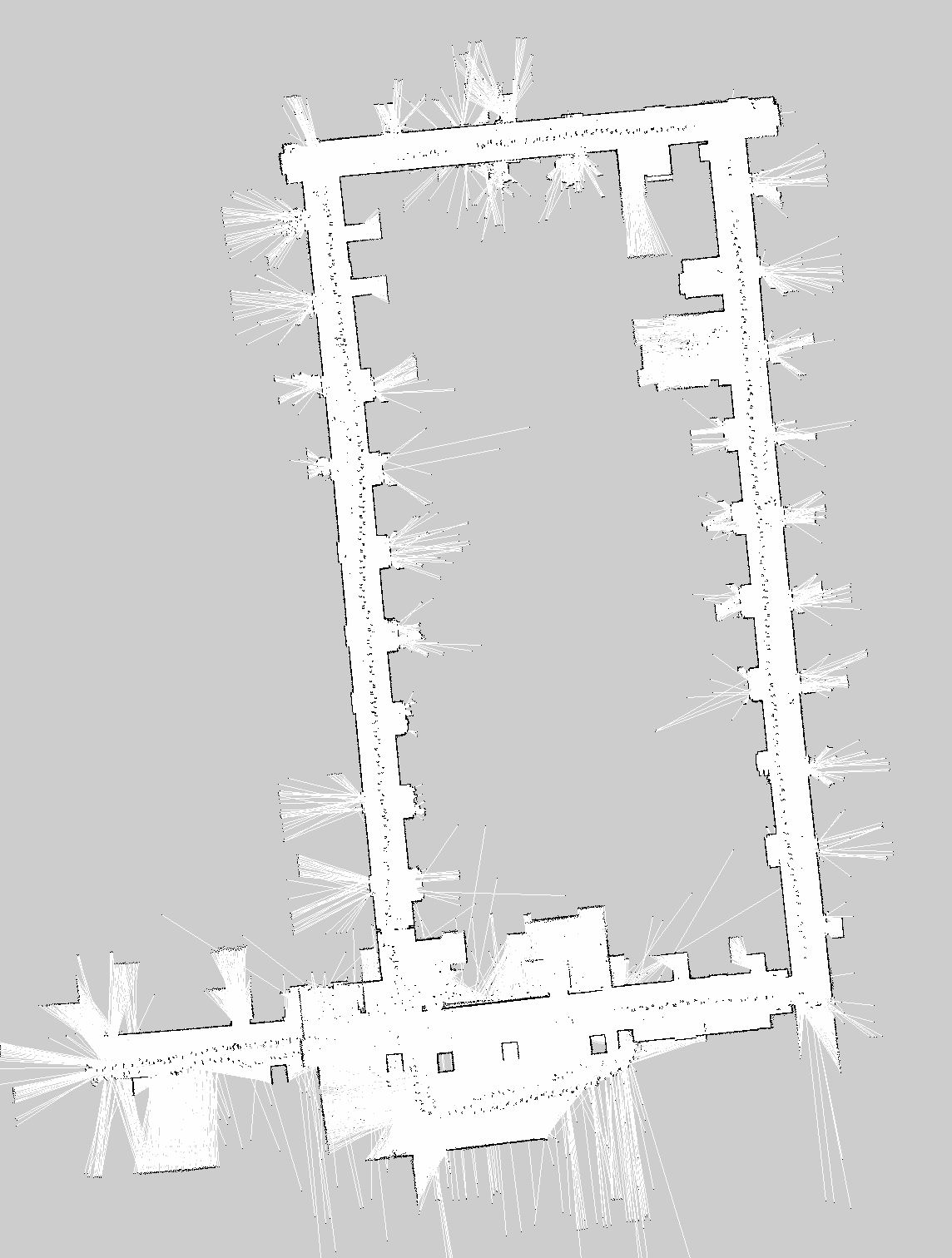
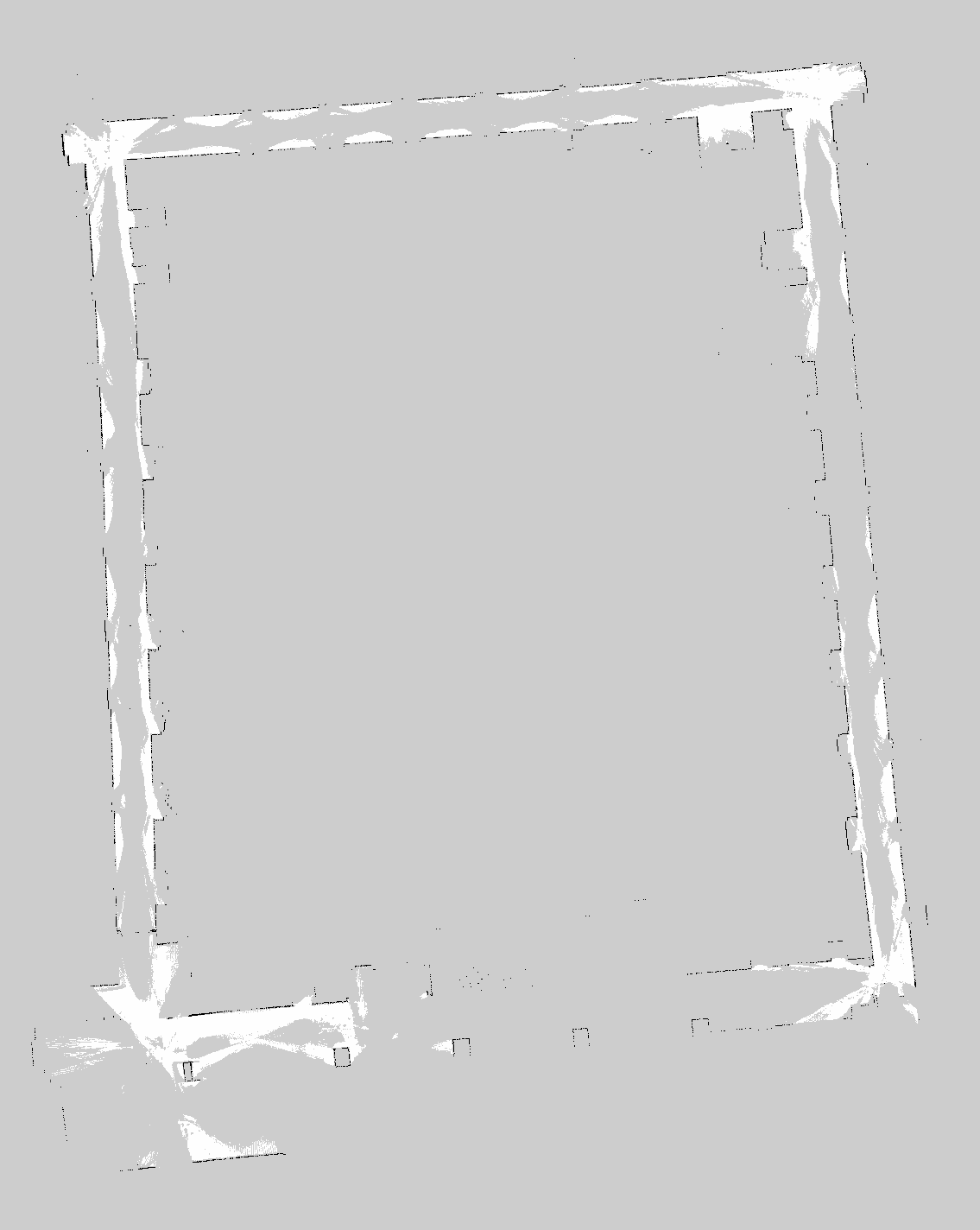
最終的に生成された地図(左から,gmapping, slam_karto, hector_slam, cartographer)
以上の結果は,どのパッケージやアルゴリズムが優れているか,どのパッケージを選ぶべきかということを示すものではないことに注意してください.今回,パラメータはほとんどチューニングしなかったので,それぞれのパッケージの最高の性能が出ているわけではありません.また,それぞれのアルゴリズムには得意不得意があるので,課題に対してどれが良いかは,実際に試してみないと分からないことが多いはずです.
現在のところROSはこのような様々な地図生成パッケージを比較検討できる唯一のプラットフォームです.オープンソースの利点を活かし,ぜひご自分の手で確かめてみることをお勧めします.
TORKでは,自律移動編を含むROS初級,中級のワークショップ,企業や大学でのプライベートワークショップのご依頼も承っております.お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp
ルンバとラズベリーパイとレーザ距離センサによる自律移動ロボット Roomblock(1)
弊社のROS中級ワークショップ・自律移動編では,ルンバをベースとした自律移動ロボット”Roomblock”を教材として使用しています.不定期なエントリとして,このRoomblockの内容を紹介していきます.
まず,Roomblockは車輪移動台車として,iRobot社のお掃除ロボット,ルンバ(Roomba)を使用しています.驚かれる方もいるかもしれませんが,ルンバは実は通信用のシリアルポートを持っていて,パソコン等から操作したりセンサ情報を取得することが可能なのです.ルンバのこの機能は,発売当初から一部のエンジニアやホビイストの間で話題になり,ルンバを操作して楽しむ”Roomba Hacking”がブームとなったほどです.ROSが登場するよりもずっと前の話です.

もう壊れてしまいましたが,2007年に私が初めて購入したRoombaです
iRobot社からは,”iRobot Create”という,掃除機能を省いた教育向けのルンバが発売されていたこともありました.ROSでも初期のTurtlebotプラットフォームは,このCreateをベースにしていました.現在はiRobot Createの販売は終了しており,TurtlebotもKobukiを用いたTurtlebot2, そしてRobotis社による独自プラットフォームTurtlebot3へと進化しています.
そんな中,なぜ今お掃除ロボット,ルンバを教材のベースとしたのでしょうか?3つ理由があります.
1つめは,ロボットの全体の価格をできるだけ抑えるためです.発売当初は割高に感じたルンバも,普及が進み今では3万円台から手に入るようになっています.屋内での自律移動に適したサイズ,車輪,センサなどを備えたロボットとしては破格です.
2つめは,ROSのパッケージがすでに存在していることです.それらを利用して,自律移動技術の本来的な目的である,地図生成や経路計画のソフトウェアの学習をすぐに始めることができます.
3つめは,ルンバが掃除をしてくれるからです…当たり前ですね.しかし,余暇にロボティクスを勉強したいエンジニアが,家族に「自律移動ができる10万円のロボットを買いたい」と言って納得してもらえるでしょうか?「ルンバなら掃除もしてくれるよ!」というとみんな喜んでくれます.

最近では「ルンバ対応」のリビングチェアなるものまであります
おっと,つい話が長くなってしまいました.私ルンバが大好きなもので….今回はここまでです.
Roomblockの詳細な作り方については,Instructablesで公開しています.ただし当社は,これらの内容によって生じるいかなる損害についても責任を負いません.興味がわいた方はあくまで自己責任で,チャレンジしてくださいね.

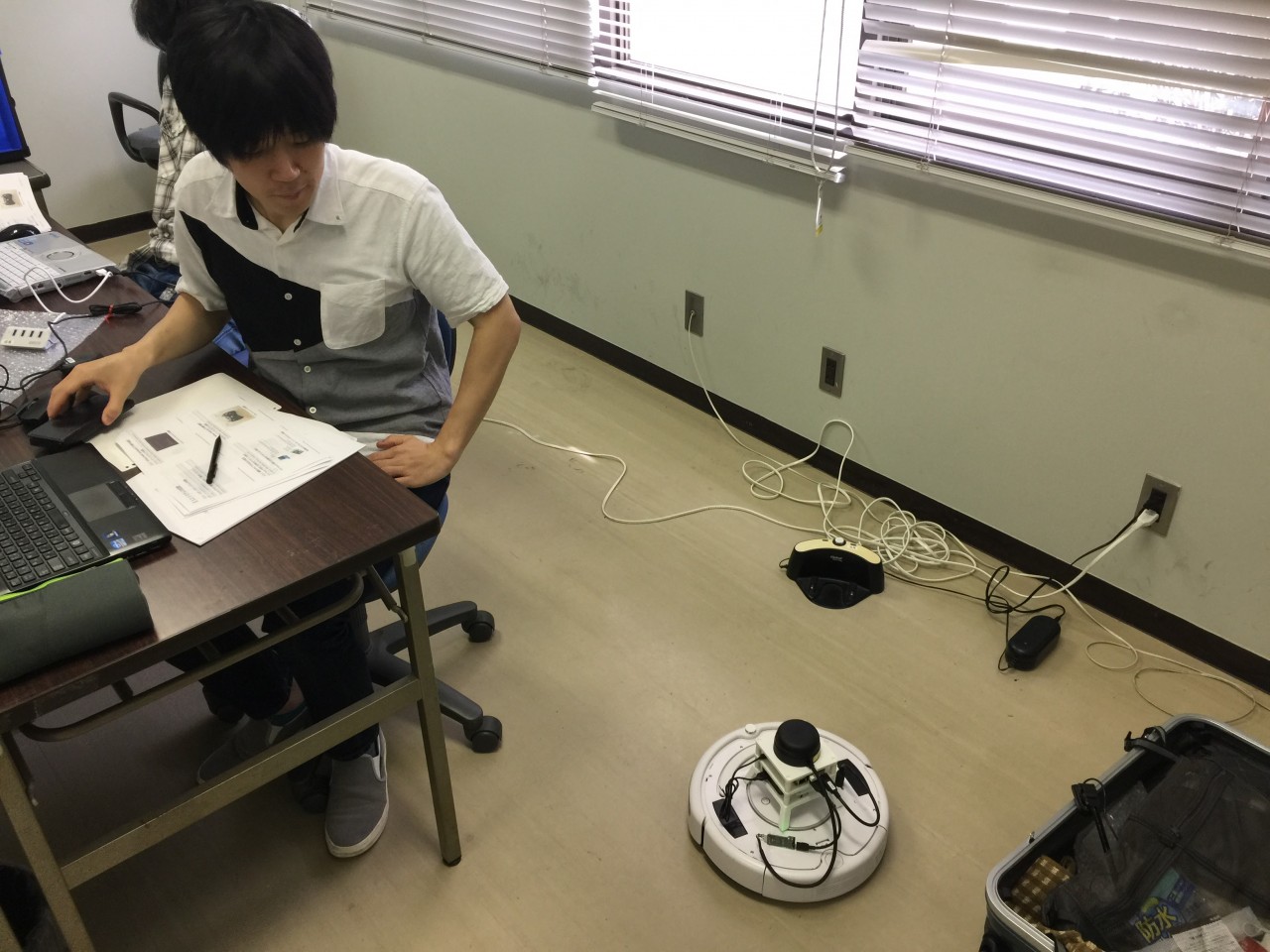
名城大学にて自律移動ロボットのデモ&実験をさせていただきました
ROS初級と中級・自律移動編を受講頂いた名城大学メカトロニクス工学科様のご好意で,自律移動ロボット”Roomblock”のデモンストレーションをさせていただきました.
ものの数分で部屋の地図を作った後,障害物を避けながら自律的に移動するロボットに,学生さんたちも興味津々でした.




TORKでは,自律移動編を含むROS初級,中級のワークショップ,企業や大学でのプライベートワークショップのご依頼も承っております.お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp
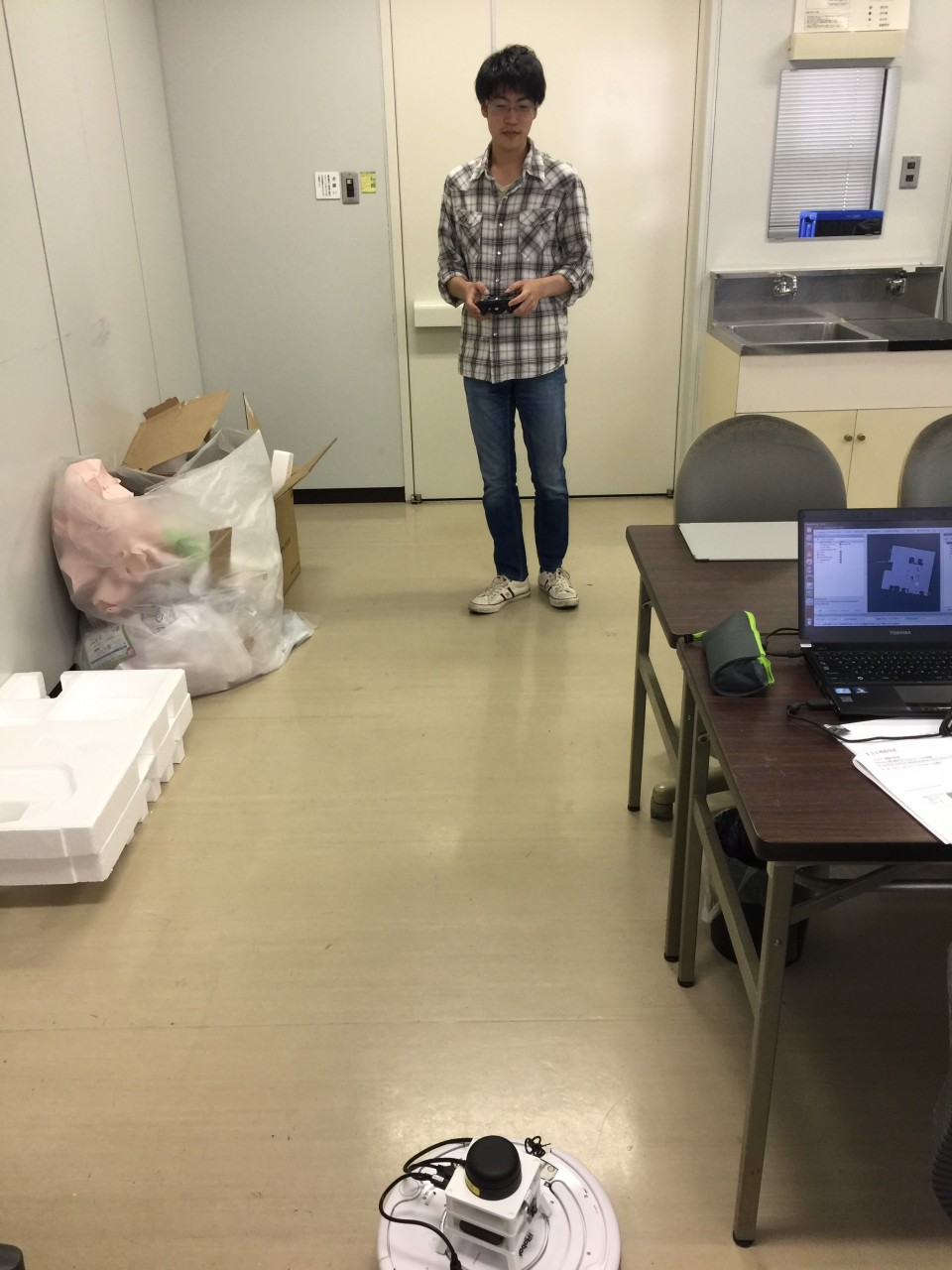
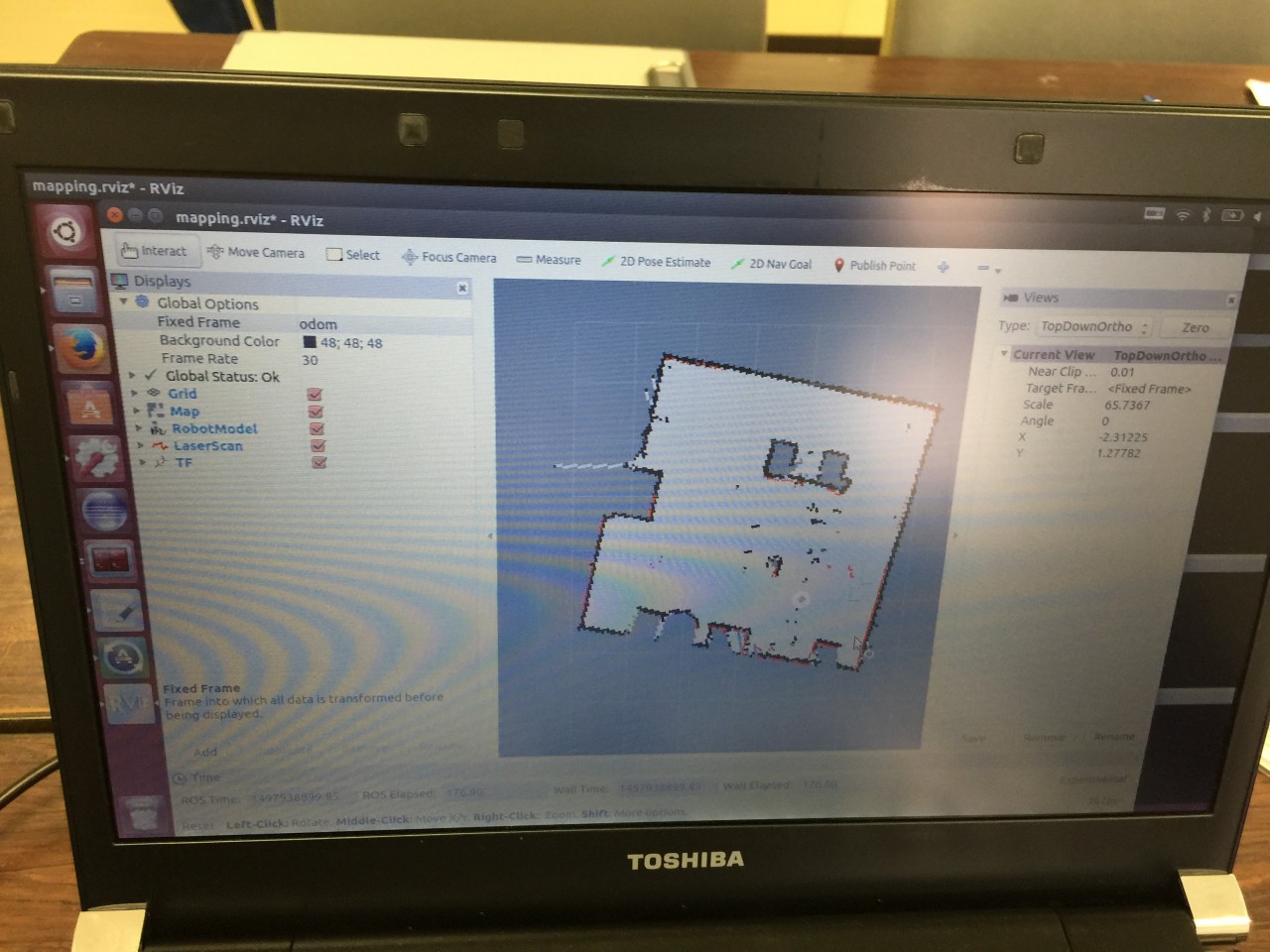
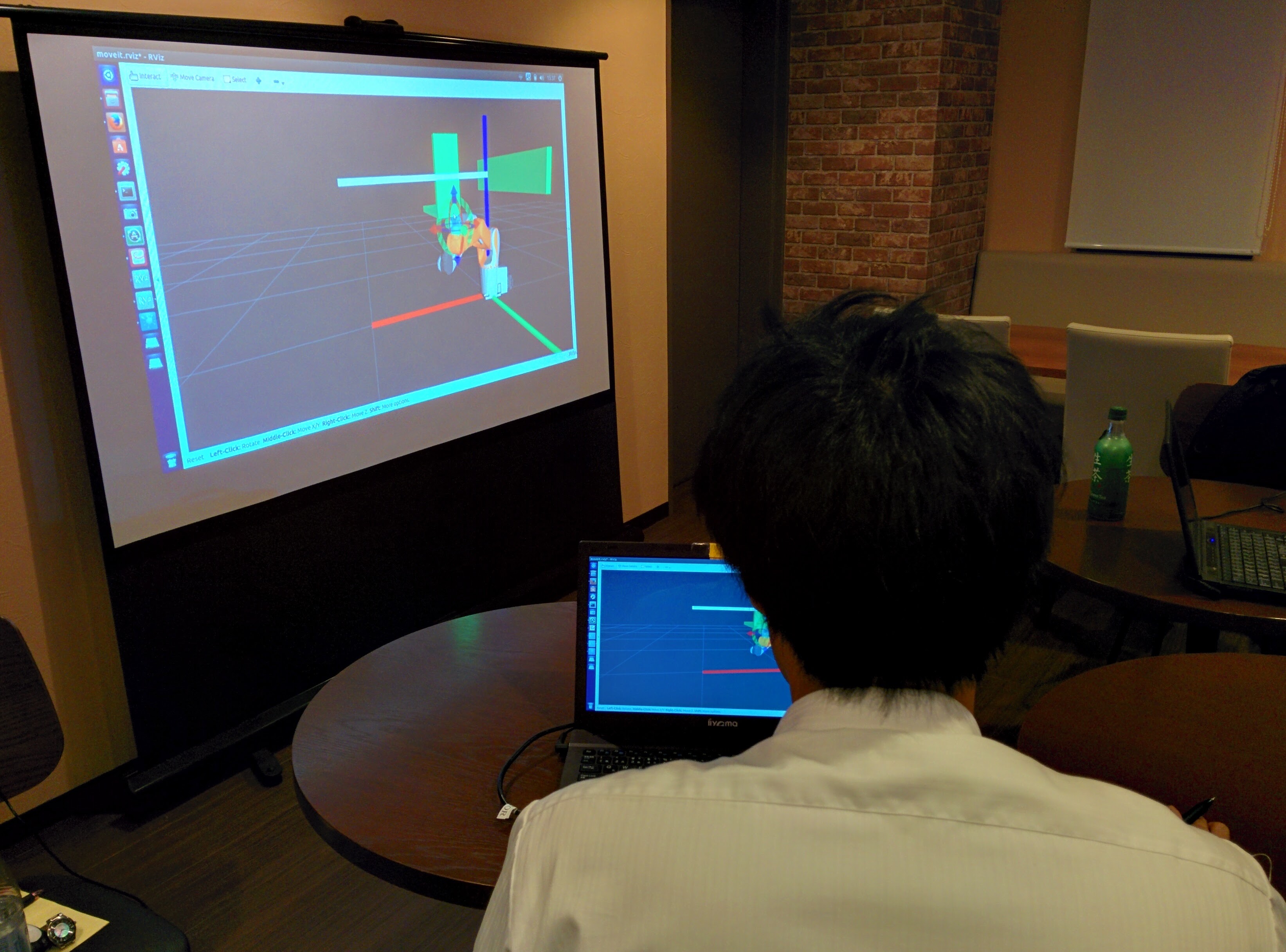
ROS Intermidiate (Navigation) Workshop in Nagoya 名古屋にてROSワークショップ中級・自律移動編を開催しました
We had the intermidiate ROS workshop on navigation at Meijo University, Nagoya, Aichi. They learned the navigation features of ROS using simulation and a real robot named “Roomblock”, Roomba based robot. Mapping, localization, control are
Thanks everyone, and well done!!
前回の初級編に続き,名古屋市の名城大学メカトロニクス工学科で,プライベートROSワークショップ中級・自律移動編を開催しました.この自律移動編は今年度から新しく始まったもので,初めての開催となります.
中級・自律移動編では,まずシミュレータを用いた自律移動技術のハンズオンを行います.つぎに,iRobot社の掃除ロボット,ルンバをベースにした自律移動ロボット”Roomblock”を用いて実際に地図生成と自律移動を行います.”Roomblock”はラズベリーパイとLIDAR(レーザ距離スキャナ)を備えた立派な自律移動ロボットで,部屋の地図を作り,目的地を設定してそこに移動することができます.最後に,ROSの自律移動機能の解説(全体の構成,関連するtopic, move_baseの仕組みなど)を受け,ハンズオンで出てくる疑問点を解消していきます.
車輪移動ロボットの操作方法,地図の生成,自律移動を実際にやってみることで,自律移動技術の理解がより深まるものと思います.参加者の皆様方,お疲れ様でした.今後の研究開発の一助となれば幸いです.
このように,TORKでは企業や大学でのプライベートワークショップのご依頼も承っております.また,本年からは中部地区での開催を増やしていこうと考えています.お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp


ROS Basic Workshop in Nagoya. 名古屋にてROSワークショップ初級編を開催しました
We had ROS Workshop at Meijo University, Nagoya, Aichi. They run through the basic of ROS, such as sensing, actuating and connecting them together. Many questions and answers was made, for comprehensive understanding to use ROS.
Great work, everyone!!
名古屋市の名城大学メカトロニクス工学科で,プライベートROSワークショップ初級編を開催しました.
初級編では環境の構築からセンシングデバイス(LeapMotion),ラジコンサーボ(Dynamixel)をROSで動かすところまでを半日で行いました.その中で出てくる疑問点(たとえばROSの概念的な部分から具体的な操作など)にもお答えいたしました.
これからバリバリ研究して行こうという学生のみなさんに,まずはROSを効率よく使っていくお手伝いができたのではないかと思います.
ROSを初めて勉強する人へのブログも公開しています. 合わせてご参考になさってください.
このように,TORKでは企業や大学でのプライベートワークショップのご依頼も承っております.また,本年からは中部地区での開催を増やしていこうと考えています.お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp
TORK to co-host Toyota HSR workshop for usersトヨタ HSR ユーザ向けセミナを行いました
トヨタ自動車株式会社 (以降トヨタ) 様 の生活支援ロボット “HSR”のユーザ様向け技術者セミナを,全国4箇所にて開催しました.
TORK はこれまでにも2014年の第1回,昨・2015年の第2回のハッカソン開催へのご支援を中心に HSR 開発に御協力をさせて頂いてきました.昨年までは HSR を所有するユーザが未だあまり居ない中での開催でしたが,HSR 開発者コミュニティが昨年発足し,HSR を所有する組織が拡大したのを受け,今回はそれら所有者で形成されるコミュニティのメンバー向けでした.
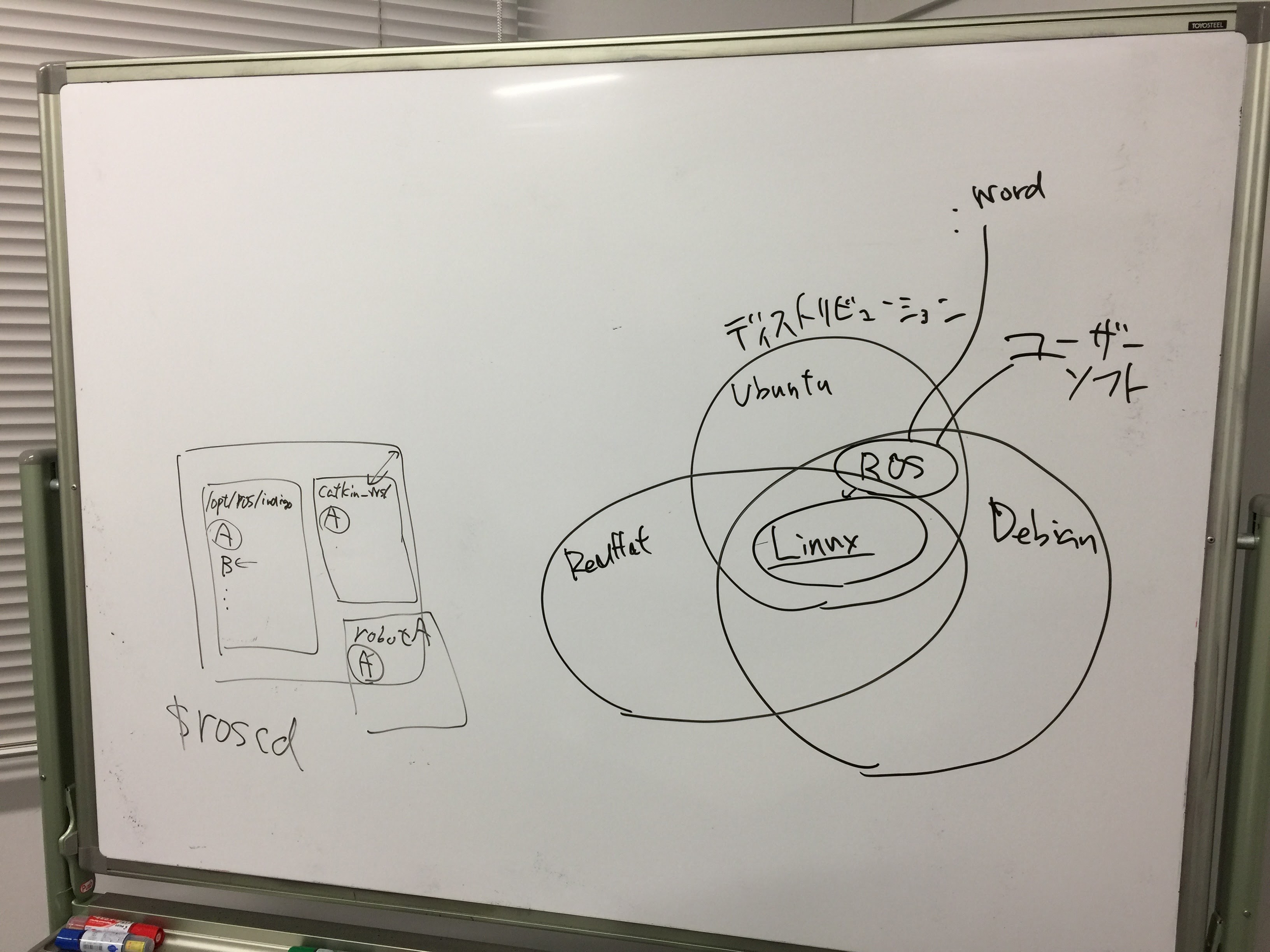
HSR の扱い方や ROS を用いたプログラミングといった技術的内容に加え今回は,トヨタ様の意向もあり,開発者コミュニティの積極的な利用に重きを置きました.
ユーザがネット上でグループを形成し議論する”コミュニティ”は,ROS をはじめ多くのソフトウェアのプロジェクトが汎く普及するにあたってその整備が欠かせないと言われています.HSR 用の開発コミュニティはトヨタ様が直接運営し,メンバ間での情報共有や議論に必要なツールが提供された本格的なものです.コミュニティをうまく利用することにより,御自身の開発を加速できると共に,開発者コミュニティ自体が成長し,それによって御自身の開発に更にメリットが還ってくる,という良い循環が生まれます.そうして一組織だけでなく,HSR 開発者コミュニティ全体で成果を共有し発展していくのが狙いです.
TORK has been partnering with the “HSR” welfare robot’s dev team at Toyota Motors Corporation (TMC). In 2014 and the last year 2015 we worked together with them for the hackathon.
This year we worked with TMC again to host developers workshop at 4 venues in Japan. In addition to going over the robot’s unique features and programming using ROS, we particularly focused on utilizing the online community designated for HSR owners, which TMC initiated in 2015 and maintains by themselves (membership-only as of today). Goal is that participants get hands on experience in interacting on the developers community so that they can accelerate their own development, which also contributes to develop the community size and maturity, which the developers ultimately appreciate. That said the seminar series this time is the beginning of building the communiy’s life cycle as TMC’s dev team intended.







本セミナ期間中は,プログラムを実行しても動かないだとか,実装の方法が分からないといった問題に当たったら,問題解決を自分だけで行うのではなく,コミュニティに質問し意見を伺いながら進めるよう提案しました.質問文を作成すること自体慣れないと時間が取られますし,技術者として他人に質問するのも,研究室ごとの質問に関する文化もあってか,勇気がいることでしょう.最初は中々質問が出ないこともありましたが,トヨタ様はじめ積極的な回答者の適切な回答のおかげもあり,質問するメリットを感じて頂けたかと思います.何より,セミナ実施後は実施前に比べ開発者コミュニティでの情報の流通量が大きく増えました.
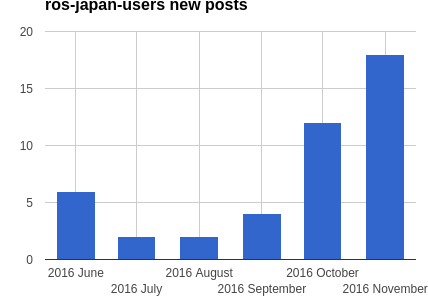
またセミナ中,HSR に依存しない問題 (ROS 一般に言える問題等) についてはそれぞれのコミュニティを利用することをお伝えし,コミュニティ例として ROS 日本語ユーザグループ “ros-japan-users” を紹介し,セミナ中に何度か試しに投稿して頂きました.その効果なのかどうか分かりませんが,セミナ開始した2016年10月以降の同グループの投稿数が下図のように一気に増えました.もし本セミナの参加者様が質問することに抵抗が減ったのであったり,セミナ無関係の方でも投稿が増えたのを見て質問する心理的障壁が少しでも下がった結果であったりするなら幸いです.
Also discussed is problem isolation – engineers often need to figure out the types of problems and post questions at the best community per incident. This is more an advanced subject, but participants well exceeded our expectation to separately post HSR-specific questions and generic-ROS questions on the forums of each. This may have resulted in the positive spike of the number of posts at the ROS Japanese user groups as you see in the graph below (workshop series started in October).
最後に幾つか,各セミナ回の最後に行ったコーディングチャレンジの動画をご紹介して終わります.HSR・ロボットコミュニティの益々の発展に微力ながら貢献できていれば何よりです.
Closing this blog post with some videos from the code challenge at the end of the workshops. We truly hope that we’ve contributed to the HSR and the world of robotics community by encouraging community involvement.
ROS Workshop Schedule, from October to December 20162016年10月-12月のROSワークショップ日程
Here are the schedule of our ROS workshop series during the last three months of 2016!
Oct. 27 Thu 13:30- Introductory
Nov. 02 Wed 13:30- Introductory
Nov. 22 Tue 13:30- Introductory
Dec. 01 Thu 13:30- Introductory
Dec. 06 Tue 13:30- Introductory
Dec. 09 Fri 13:30- Introductory
Dec. 21 Wed 13:30- Introductory
Venue: Hongo, Tokyo
Inquiries: info[at]opensource-robotics.tokyo.jp
以下日程でROSワークショップを行います.
10月27日(木)13:30~ ROSワークショップ初級編
11月02日(水)13:30~ ROSワークショップ初級編
11月22日(火)13:30~ ROSワークショップ初級編
12月01日(木)13:30~ ROSワークショップ初級編
12月06日(火)13:30~ ROSワークショップ初級編
12月09日(金)13:30~ ROSワークショップ初級編
12月21日(水)13:30~ ROSワークショップ初級編
場所は都内・本郷のミーティングスペースでの実施を予定しています.
中級編についてはご要望があり次第,日程を調整いたしますのでメイルにてお問い合わせください.
お申込みは以下より詳細をご確認の上,ページ内のお申込みリンクよりエントリをお願い致します.
日程の調整,その他ご相談,企業内ワークショップ,カスタマイズワークショップも承っております.お気軽にご相談ください.
info[at]opensource-robotics.tokyo.jp
ROS Workshop for Beginners on 13th September ROSワークショップ初級編を開催しました
We had ROS Workshop at Hongo, Tokyo.
One participant prepared own Ubuntu PC and installed indigo, the other used our LiveUSB.
You can experience ROS workshop by the LiveUSB without installation of Ubuntu on your machine.
Thanks you for joining us!!
今回も本郷のオープンスペースにてROSワークショップ初級編を開催しました.
ご自分のPCでUubuntu環境が準備できなくても,LiveUSB等でワークショップを体験できます.
初級編では環境の構築からセンシングデバイス,サーボの実機をROSで動かすところまで半日で習得できます.
実施時間中にROSに関するお困りごとだけでなく,オープンソースを社内で運用していく際の疑問点等にも随時お答えしています.
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
出張セミナー,カスタマイズワークショップ,個別コンサルティング,プライベートワークショップも承っております.
お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp


ROS Workshop for Beginners on 2nd September ROSワークショップ初級編を開催しました
We had ROS Workshop at Hongo, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
今回も本郷のオープンスペースにてROSワークショップ初級編を開催しました.
皆さん,ご自身のPCにROSをインストールしてのご参加でした.
ご自分のPCでUubuntu環境が準備できなくても,LiveUSB等でワークショップを体験できます.
初級編では環境の構築からセンシングデバイス,サーボの実機をROSで動かすところまで半日で習得できます.
時間中にはROSに関するお困りごとだけでなく,社内で運用していく際の疑問点等にも随時お答えしています.
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
プライベートワークショップも承っております.
お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp


ROS Workshop for Beginners on 3rd August ROSワークショップ初級編を開催しました
We had ROS Workshop at Hongo, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
今回も本郷のオープンスペースにてROSワークショップ初級編を開催しました.
ご自分のPCでUubuntu環境が準備できなくても,LiveUSB等でワークショップを体験できます.
一つ一つのタスクに対して積極的な質問をいただきながら最後まで完遂しました.お疲れ様でした!
初級編では環境の構築からセンシングデバイス,サーボの実機をROSで動かすところまで半日で習得できます.
時間中にはROSに関するお困りごとだけでなく,社内で運用していく際の疑問点等にも随時お答えしています.
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
プライベートワークショップも承っております.
お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp

Thank you for the wonderful souvenirs ! お土産ありがとうございます!
We had a meeting with a customer at Hongo, Tokyo.
We received Ebi-sembeis as souvenirs today.
This Ebi-sembeis (shrimp cracker) is a very famous gift in Japan.
Thank you for the wonderful souvenirs !!!
ROS Seminar courses will be held in summer 2016 by TORK in Tokyo, Japan. Any inquiry can be posted at info[a-t]opensource-robotics.tokyo.jp
打ち合わせでお客様からお土産を頂きました.お気遣い頂き恐縮です.
坂角総本舗の海老煎餅です!最高です!!ありがとうございます!!!
いつも以上に仕事を頑張っております!
ROSやオープンソースに関わるコンサルティング,出張ワークショップ,カスタマイズワークショップも承っております.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
その他,こういった企画を実施して欲しい等,TORKにやってもらいたいことのご意見ご要望もお待ちしております!
メール以外にもfacebookやtwitterアカウントもございますのでそちらにメッセージ,リプライにてご意見いただくことも可能です.
お気軽にお問い合わせください.

ROS Workshop for Beginners on 13th JulyROSワークショップ初級編を開催しました
We had ROS Workshop at Hongo, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
今回も本郷のオープンスペースにてROSワークショップ初級編を開催しました.
ご自分のPCでUubuntu環境が準備できなくても,LiveUSB等でワークショップを体験できます.
本日も全員が最後まで完遂しました.お疲れ様でした!
初級編ではROSの環境の構築からセンシングデバイス,サーボの実機を動かすところまで半日で習得できます.
時間中にはROSに関するお困りごとだけでなく,社内で運用していく際の疑問点等にも随時お答えしています.
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
ROS Workshop Schedule, from July to September 20162016年7月-9月のROSワークショップ日程
Here are the schedule of our ROS workshop series during the third three months of 2016!
Jul. 07 Thu 13:30- Introductory
Jul. 13 Wed 13:30- Introductory
Jul. 15 Fri 13:30- Introductory
Jul. 22 Fri 10:30- Intermediate
Aug. 03 Wed 13:30- Introductory
Aug. 10 Wed 13:30- Introductory
Aug. 16 Tue 13:30- Introductory
Aug. 19 Fri 10:30- Intermediate
Sept. 01 Thu 13:30- Introductory
Sept. 07 Wed 13:30- Introductory
Sept. 13 Tue 13:30- Introductory
Sept. 16 Fri 10:30- Intermediate
Sept. 27 Tue 13:30- Introductory
Sept. 29 Thu 10:30- Intermediate
Venue: Hongo, Tokyo
Inquiries: info[at]opensource-robotics.tokyo.jp
以下日程でROSワークショップを行います.
7月07日(木)13:30~ ROSワークショップ初級編
7月13日(水)13:30~ ROSワークショップ初級編
7月15日(金)13:30~ ROSワークショップ初級編
7月22日(金)10:30~ ROSワークショップ中級・マニピュレーション編
8月03日(水)13:30~ ROSワークショップ初級編
8月10日(水)13:30~ ROSワークショップ初級編
8月16日(火)13:30~ ROSワークショップ初級編
8月19日(金)10:30~ ROSワークショップ中級・マニピュレーション編
9月01日(木)13:30~ ROSワークショップ初級編
9月07日(水)13:30~ ROSワークショップ初級編
9月13日(火)13:30~ ROSワークショップ初級編
9月16日(金)10:30~ ROSワークショップ中級・マニピュレーション編
9月27日(火)13:30~ ROSワークショップ初級編
9月29日(木)10:30~ ROSワークショップ中級・マニピュレーション編
場所については都内・本郷のミーティングスペースでの実施を予定しています.
お申込みは以下より詳細をご確認の上,ページ内のお申込みリンクよりエントリをお願い致します.
ROSワークショップ初級編
ROSワークショップ中級・マニピュレーション編
日程の調整,その他ご相談,企業内ワークショップ,カスタマイズワークショップも承っております.お気軽にご相談ください.
info[at]opensource-robotics.tokyo.jp
ROS Workshop for Intermediate Manipulation on 22th June ROSワークショップ中級・マニピュレーション編を開催しました
We had ROS Workshop for Intermediate Manipulation at Hongo, Tokyo.
The participant also joined our Beginners Workshop a few weeks ago, then re-setup her own PC, purchased robot parts and review all contents. Her fast learning and active question make a lecture really enjoied the event.
Thanks you for joining us!!
今回は本郷のオープンスペースにて,ROSワークショップ中級・マニピュレーション編を開催しました.
本郷のオープンスペースはコーヒーが一日中無料です!
本日の参加者の方は初級編の機材一式を購入し完璧に復習してから中級・マニピュレーション編にご参加いただきました.
「いつも新しい知識を得られるので中級編も参加できてよかったです」とのコメントをいただきました.
長時間の講習お疲れ様でした.ありがとうございました.
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
プライベートワークショップ,出張ワークショップ,カスタマイズワークショップも承っております.
お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp

ROS Private Workshop on 8th June プライベートROSワークショップを開催しました
We also had a private ROS Workshop at the seminar room in the company.
The participants prepared own Ubuntu PC and installed indigo. Their active questions make a lecture really enjoied the event.
Thanks you for joining us!!
本日は某企業様の会議室をお借りして,企業内でのプライベートROSワークショップを開催いたしました.
実践的な質問をいただきながらの活発なワークショップとなりました.
長時間のワークショップ,皆様お疲れ様でした.
出張ワークショップ,カスタマイズワークショップも承っております.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
お申込みお問い合わせお待ちしております!


ROS Workshop for Beginners on 25th MayROSワークショップ初級編を開催しました
We had ROS Workshop for Beginners at Hongo, Tokyo.
You can experience ROS workshop by the LiveUSB without installation of Ubuntu on your machine.
Thanks you for joining us!!
今回も本郷のオープンスペースにて,ROSワークショップ初級編を開催しました.
本郷のオープンスペースはコーヒー・アイスコーヒーが一日中無料です!
ROSワークショップ初級編はLinuxが初めての人でも参加可能です.
UbuntuPCを準備出来なくても弊社のLiveUSBを使ってワークショップを実施可能です.
時間中時間後にROSを社内に導入する際のお困りごとにもお答えしています.
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
プライベートワークショップ,出張ワークショップ,カスタマイズワークショップも承っております.
詳細はWebページをご覧いただくか,メールにてお気軽にお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
ROS Workshop for Intermediate Manipulation on 19th May ROSワークショップ中級・マニピュレーション編を開催しました
We also had ROS Workshop for Intermediate Manipulation at Hongo, Tokyo.
They took part a workshop using our LiveUSB. You can experience ROS workshop by the LiveUSB without installation of Ubuntu on your machine.
Thanks you for joining us!!
今回も本郷のオープンスペースにて,ROSワークショップ中級・マニピュレーション編を開催しました.
本郷のオープンスペースはコーヒー・アイスコーヒーが一日中無料です!
UbuntuPCを準備出来なくても弊社のLiveUSBを使ってワークショップを実施可能です.
ROSを使うために新しくマシンを購入されるという方でどんなマシンを購入したらよいかというご質問を受けることがあります.
そんな方は「ゲーミングPC」とカテゴライズされている商品から選ぶと良いかもしれません.
可能であればNvidia搭載のものをおすすめします.
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
プライベートワークショップ,出張ワークショップ,カスタマイズワークショップも承っております.
詳細はWebページをご覧いただくか,メールにてお気軽にお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp

ROS Workshop for Beginners on 11th MayROSワークショップ初級編を開催しました
We had ROS Workshop at Hongo, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!
今回も本郷のオープンスペースにてROSワークショップ初級編を開催しました.
ご自分のPCでUubuntu環境が準備できなくても,LiveUSB等でワークショップを体験できます.
本日も全員が最後まで完遂しました.お疲れ様でした!
ROSのワークスペースは複数作ることができます.
まず最初に”catkin_ws”と言う名前でワークスペースを作るお手本が多いですが,
catkin_wsという名前である必要はありません.自分の好きな名前でワークスペースを作ることができます.
バリバリROSで開発されている方にとっては当たり前のことでも,ROSを初めたばかりの人にとっては気付けないことが案外あったりするものです.
ROSワークショップに参加すると実際にROSで開発する際のちょっとしたコツが習得できますよ!
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.

Private ROS Workshop on 19th AprilプライベートROSワークショップを開催しました
We also had a private ROS Workshop at the seminar room in the company.
The participants prepared own Ubuntu PC and installed indigo. Their active questions make a lecture really enjoied the event.
Thanks you for joining us!!
本日は某企業様の会議室をお借りして,企業内でのプライベートROSワークショップを開催いたしました.
実践的な質問をいただきながらの活発なワークショップとなりました.お疲れ様でした.
出張ワークショップ,カスタマイズワークショップも承っております.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
お申込みお問い合わせお待ちしております!
ROS Workshop for Intermediate Manipulation on 15th April ROSワークショップ中級・マニピュレーション編を開催しました
We had ROS Workshop for Intermediate Manipulation at Hongo, Tokyo.
The participant prepared own Ubuntu PC and installed indigo.
You can experience ROS workshop by the LiveUSB without installation of Ubuntu on your machine.
Thanks you for joining us!!
今回は本郷のオープンスペースにて,ROSワークショップ中級・マニピュレーション編を開催しました.
本郷のオープンスペースは一日中コーヒーが無料です!
本日の参加者の方はROS歴1年でタスクが順調に消化されていきました.
「独学で知ることが出来なかった基本を知ることが出来て参加出来てよかった」とのコメントをいただきました.
長時間の講習お疲れ様でした.ありがとうございました.
ワークショップはUbuntuで実施します.Ubuntuマシンをお持ちで無い場合は弊社のLiveUSBを使うことでご自分のマシン環境を変更することなくワークショップを体験することが可能です.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
4-6月のワークショップ日程を公開しています.
プライベートワークショップ,出張ワークショップ,カスタマイズワークショップも承っております.
お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp

ROS Workshop Schedule, from April to June 20162016年4月-6月のROSワークショップ日程
Here are the schedule of our ROS workshop series during the second three months of 2016!
Apr. 13 Wed 13:30- Introductory
Apr. 15 Fri 10:30- Intermediate
Apr. 26 Tue 13:30- Introductory
May 11 Wed 13:30- Introductory
May 19 Thu 10:30- Intermediate
May 25 Wed 13:30- Introductory
June 09 Thu 13:30- Introductory
June 16 Thu 13:30- Introductory
June 22 Wed 10:30- Intermediate
Venue: Hongo, Tokyo
Inquiries: info[at]opensource-robotics.tokyo.jp
以下日程でROSワークショップを行います.
4月13日(水)13:30~ ROSワークショップ初級編
4月15日(金)10:30~ ROSワークショップ中級・マニピュレーション編
4月26日(火)13:30~ ROSワークショップ初級編
5月11日(水)13:30~ ROSワークショップ初級編
5月19日(木)10:30~ ROSワークショップ中級・マニピュレーション編
5月25日(水)13:30~ ROSワークショップ初級編
6月09日(木)13:30~ ROSワークショップ初級編
6月16日(木)13:30~ ROSワークショップ初級編
6月22日(水)10:30~ ROSワークショップ中級・マニピュレーション編
場所については都内・本郷のミーティングスペースでの実施を予定しています.
お申込みは以下より詳細をご確認の上,ページ内のお申込みリンクよりエントリをお願い致します.
ROSワークショップ初級編
ROSワークショップ中級・マニピュレーション編
日程の調整,その他ご相談,企業内ワークショップも承っております.お気軽にご相談ください.
info[at]opensource-robotics.tokyo.jp
ROS Workshop for Intermediate Manipulation on March ROSワークショップ中級・マニピュレーション編を開催しました
We also had ROS Workshop for Intermediate Manipulation at Yushima, Tokyo.
They took part a workshop using our LiveUSB. You can experience ROS workshop by the LiveUSB without installation of Ubuntu on your machine.
Thanks you for joining us!!
今回も湯島のミーティングスペースにて,ROSワークショップ中級・マニピュレーション編を開催しました.
ワークショップはUbuntuで実施します.弊社のLiveUSBを使うことでマシン環境を変更することなくワークショップを体験することができます.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
長時間の講習お疲れ様でした.ありがとうございました.
4-6月のワークショップ日程を公開しています.
https://opensource-robotics.tokyo.jp/?p=1470
プライベートワークショップも承っております.
お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp

Private ROS Workshop on 25th MarchプライベートROSワークショップを開催しました
We also had a private ROS Workshop at the seminar room in the company.
Their active questions make a lecture really enjoied the event.
Thanks you for joining us!!
本日は某企業様の講演ホールをお借りして,企業内でのプライベートROSワークショップを開催いたしました.
活発にご質問をいただき1時間延長してのワークショップとなりました.お疲れ様でした.
出張ワークショップ,カスタマイズワークショップも承っております.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
お申込みお問い合わせお待ちしております!
ROS Workshop for Beginners on 24th MarchROSワークショップ初級編を開催しました
We also had ROS Workshop at Yushima, Tokyo.
We used custom ROS-preinstalled LiveUSB, so people had ROS experience without change your PC environment.
All of attendee ran through the all topics.
Great work, everyone!!

今回も湯島のミーティングスペースにてROSワークショップ初級編を開催しました!
ご自分のPCでUubuntu環境が準備できなくても,LiveUSB等でワークショップを体験できます.
本日も全員が最後まで完遂しました.お疲れ様でした!
ROS Workshop for Beginners on 7th MarchROSワークショップ初級編を開催しました
We also had ROS Workshop at Yushima, Tokyo.
Beginner’s Workshop covers the Leap Motion, 3D gesture sensor. The Leap is capable of tracking the fingers and palm of a user with millimeter accuracy.
leap_motion is a ROS driver for interfacing with the Leap, provides single hand 3D palm information.
The participants use its source code and study how to publish/subscribe a ROS topic in the workshop.
Thanks you for joining us!!

今回も湯島のミーティングスペースにてROSワークショップ初級編を開催しました!
初級編ではLeap Motionを使います.Leap MotionはROSのパッケージがあり,ワークショップではソースコードをダウンロードして使います.
Leap Motionに初めて触れる方は,自分の手の動きに連動するVisualizerに感激されます.
本日も順調に進んで最後まで完遂しました.お疲れ様でした!
ROS Workshop for Beginners on 25th FebruaryROSワークショップ初級編を開催しました
We also had ROS Workshop at Yushima, Tokyo.
He joined our Beginners Workshop with own PCinstalled Ubuntu and ROS indigo.
The participant is emacs user.
( I love emacs!!! ).
Thanks you for joining us!!

今回も湯島のミーティングスペースにてROSセミナー初級編を開催しました!
今日の参加者の方は事前のご自分のマシンにROS indigoのインストールまで完了した状態でご参加くださいました.
お疲れ様でした!
ROS Workshop for Intermediate Manipulation on Feburary ROSワークショップ中級・マニピュレーション編を開催しました
We also had ROS Workshop for Intermediate Manipulation at Yushima, Tokyo.
They took part a workshop using our LiveUSB. You can experience ROS workshop by the LiveUSB without installation of Ubuntu on your machine.
Thanks you for joining us!!

今回も湯島のミーティングスペースにて,ROSワークショップ中級・マニピュレーション編を開催しました.
今日の参加者は皆vi使いの方でした.(私はemacs派です!)
弊社のLiveUSBを使うことでマシン環境を変更することなくワークショップを体験することができます.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
長時間の講習お疲れ様でした.ありがとうございました.
ROS Workshop at Municipality相模原ロボット制御用オープンソース講習会を開催しました
We held ROS Workshop at Sagamihara ROBOT SUPPORT CENTER (SIC) and Okada-Lab at Tamagawa University on 16th, 30th Jan, and 6th Feb.
SIC is an industrial training facility in the city of Sagamihara in Kanagawa prefecture, where global and local businesses are located in electronics and heavy industry. The center aims to assist the local economy by providing training and support for the robotics technologies.
We, TORK, have been holding technical workshop for opensource robotics for several dozen times at different levels (this, this, this, and this to name a few). This time we worked with SIC to give a series of dedicated workshop for the engineers and managers from the local tech companies.
The contents consists of following three parts. We also would like to thank to students from Okada-Lab@Tamagawa University for their assistance.
- 1. ROS Workshop for beginners.
- Learning basics of ROS system through the hands-on workshop.
- ROS Setup
- Recognition human hand with vision sensor(LeapMotion)
- Recognition based motor control
- Learning basics of ROS system through the hands-on workshop.
- 2. ROS Workshop for intermediates
- Learning how to control original robot arm. This tutorial uses original manipulator using Dynamixel servo motors. Learn how to create URDF model and MoveIt Setup.
- Robot arm modeling and visualization
- Connecting real robot and robot on rviz
- Control simulated robot on rviz using MoveIt!
- Control real robot using MoveIt!
- Recognizing AR marker and transformations
- Wringing vision based robot motion control program
- Learning how to control original robot arm. This tutorial uses original manipulator using Dynamixel servo motors. Learn how to create URDF model and MoveIt Setup.
- 3. ROS + Nextage/HIRO Dual-arm robot
- Learning ROS and OpenRTM using HIRO robots, including how to plan motions using MoveIt!, using Kinect Depth sensor for realtime obstacle avoidance, grasping object using hand-eye cameras.


1月16日,30日,2月6日と,三回にわたって相模原ロボット導入支援センター様および玉川大学岡田研究室にてロボット制御用オープンソース講習会を開催しました.
内容は以下の三回構成.地域の経営者,技術者の皆さんにオープンソースのロボット制御方法を学んでいただきました.玉川大学の岡田研究室の学生の皆さんに運営サポートで参加していただき大変助かりました.ご参加いただいた皆様,運営の皆様,玉川大学岡田先生と学生の皆さん,お疲れ様でした.ありがとうございました!
- 第一回( ROSワークショップ初級編)
- ロボットの基本ソフトである ROS の概要を基礎から紹介する.ワークショップを通して手を動かしROSの概要を知る.ROS を使ったプロジェクトを始めようと考えている初学者に適している.
- ROS 開発環境設定
- 認識センサ(LeapMotion)を用いた手の検出プログラム
- 認識に基づくサーボモータ制御
- ロボットの基本ソフトである ROS の概要を基礎から紹介する.ワークショップを通して手を動かしROSの概要を知る.ROS を使ったプロジェクトを始めようと考えている初学者に適している.
- 第二回(ROSワークショップ中級編)
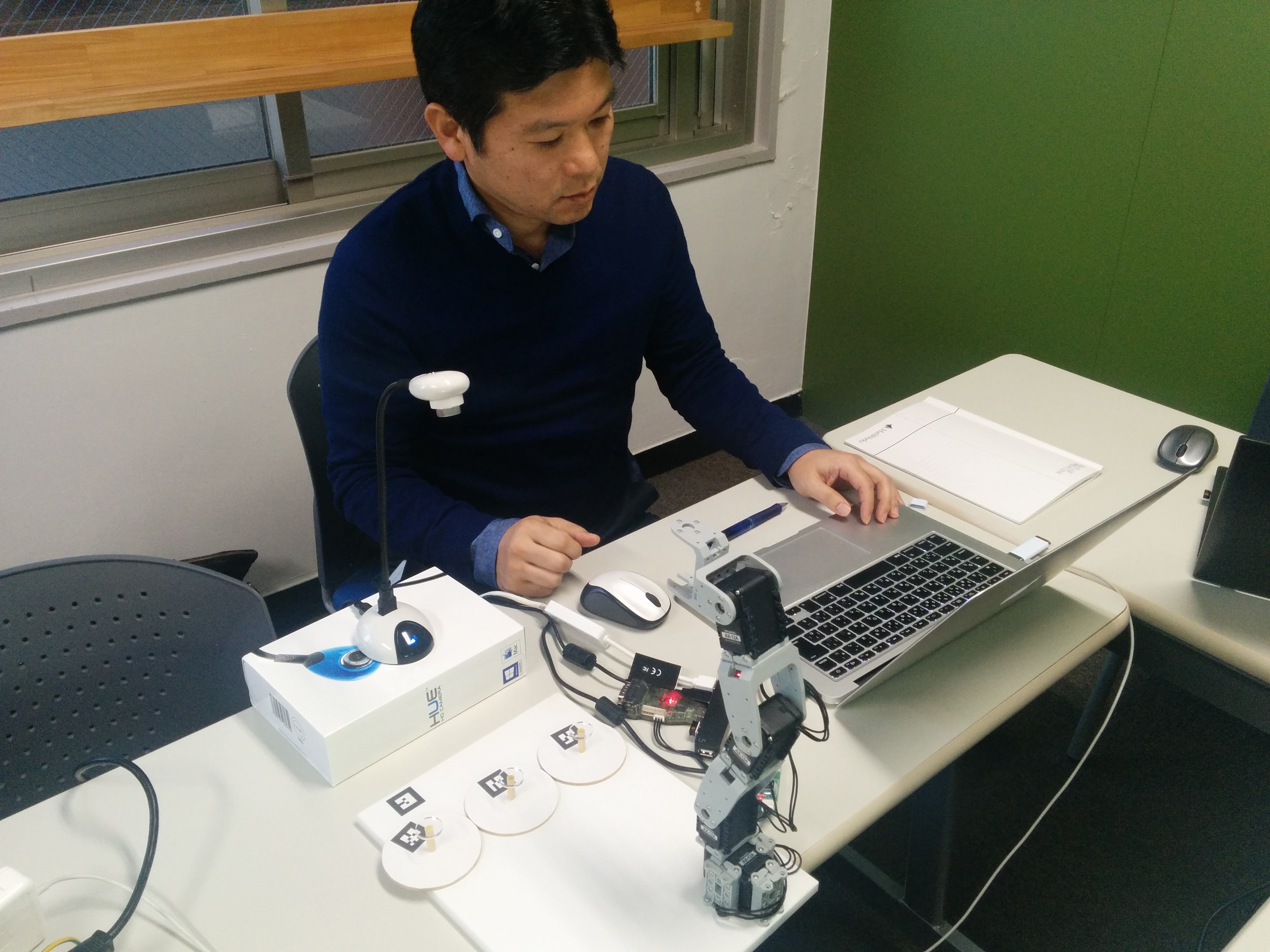
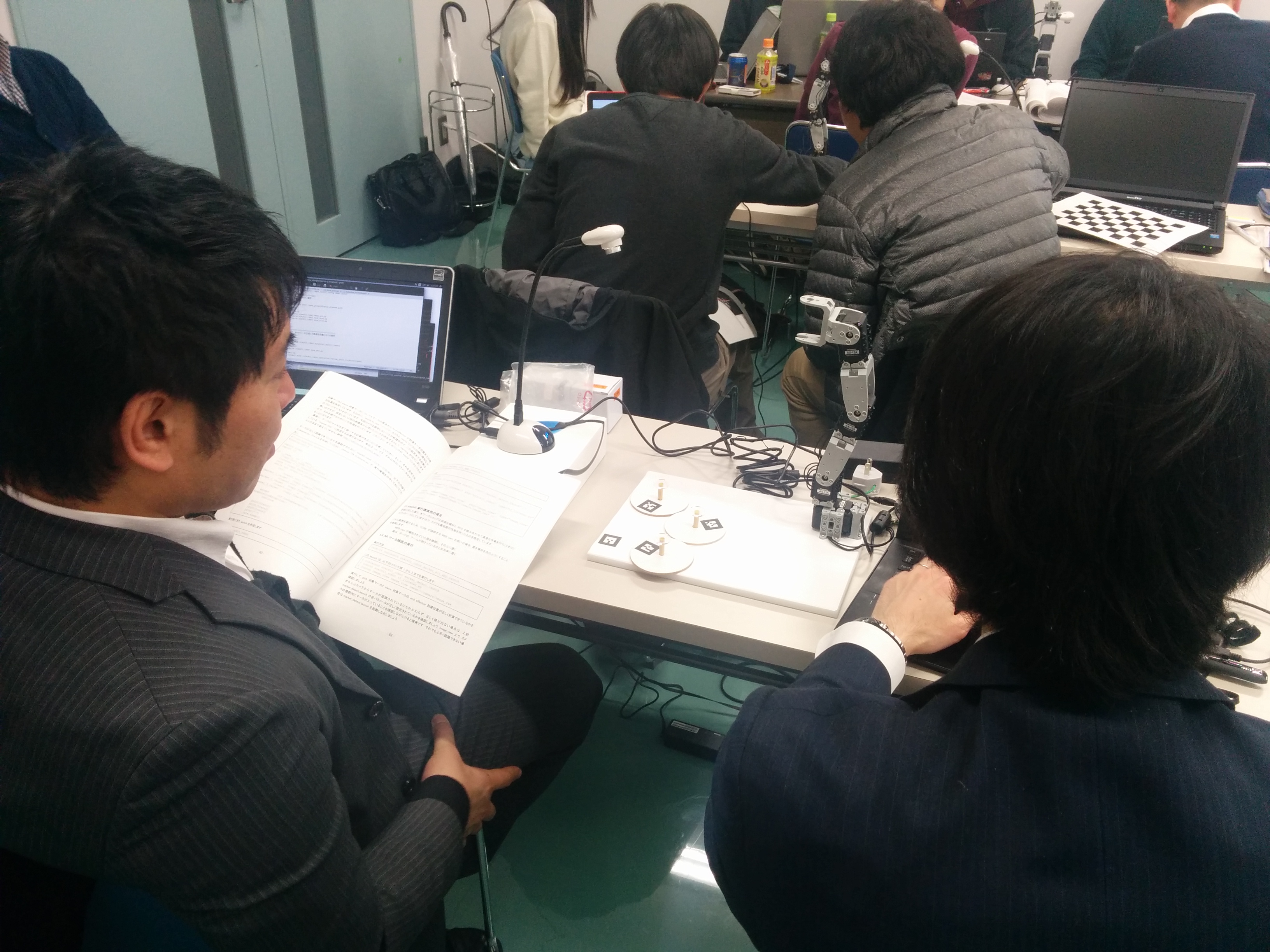
- オリジナルのロボットアームを作成して動かす場合に必要な知識の獲得を目的とする.具体的には,Dynamixel サーボモータを使用した4軸ロボット「StackIt!」により,マーカのついたパックの pick&place を通じてロボットモデル(URDF)の作成方法や MoveIt! の設定方法を学ぶ.
- ロボットアームのモデル作成と表示
- 実物のロボットとシミュレータ(RViz)上のロボットの接続
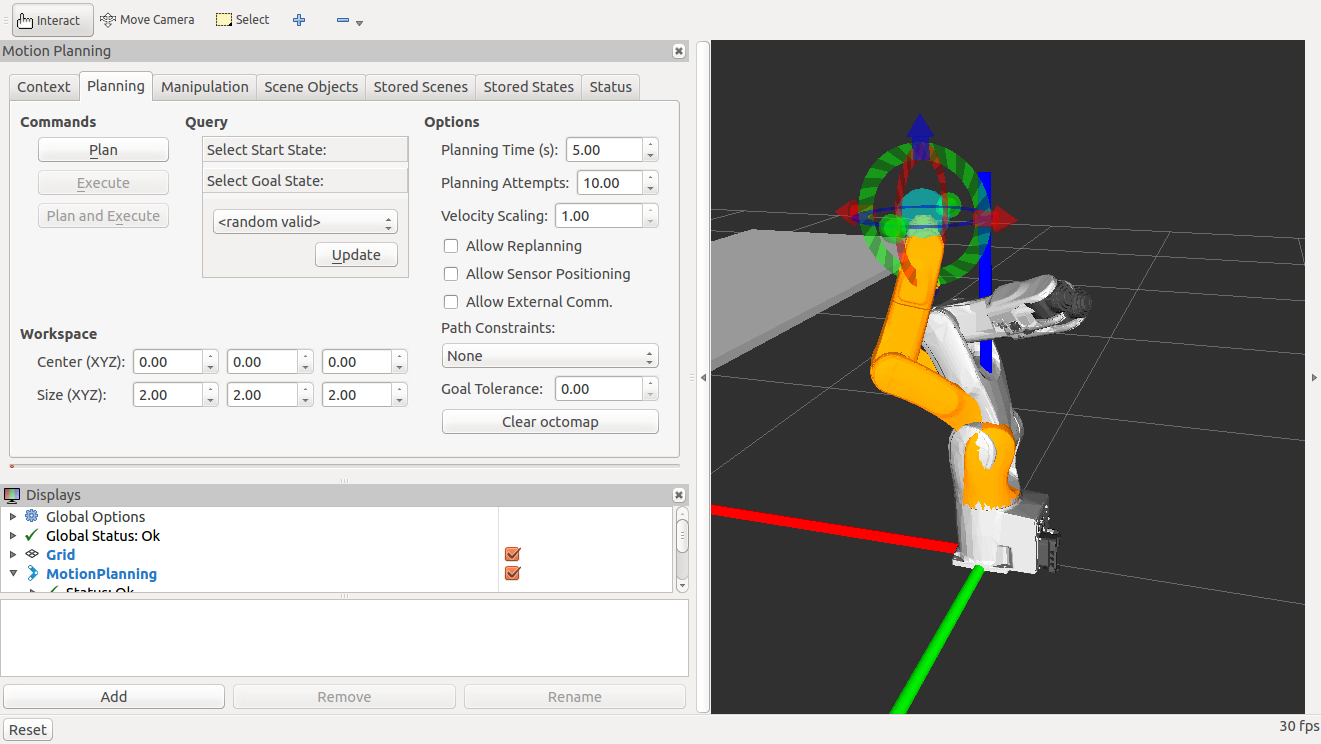
- MoveIt! を使ってシミュレータ(Rviz)上のロボットを動かす
- MoveIt! を使って本物のロボットを動かす
- カメラによる AR マーカの認識と座標変換
- ロボットの動作プログラムの作成
- オリジナルのロボットアームを作成して動かす場合に必要な知識の獲得を目的とする.具体的には,Dynamixel サーボモータを使用した4軸ロボット「StackIt!」により,マーカのついたパックの pick&place を通じてロボットモデル(URDF)の作成方法や MoveIt! の設定方法を学ぶ.
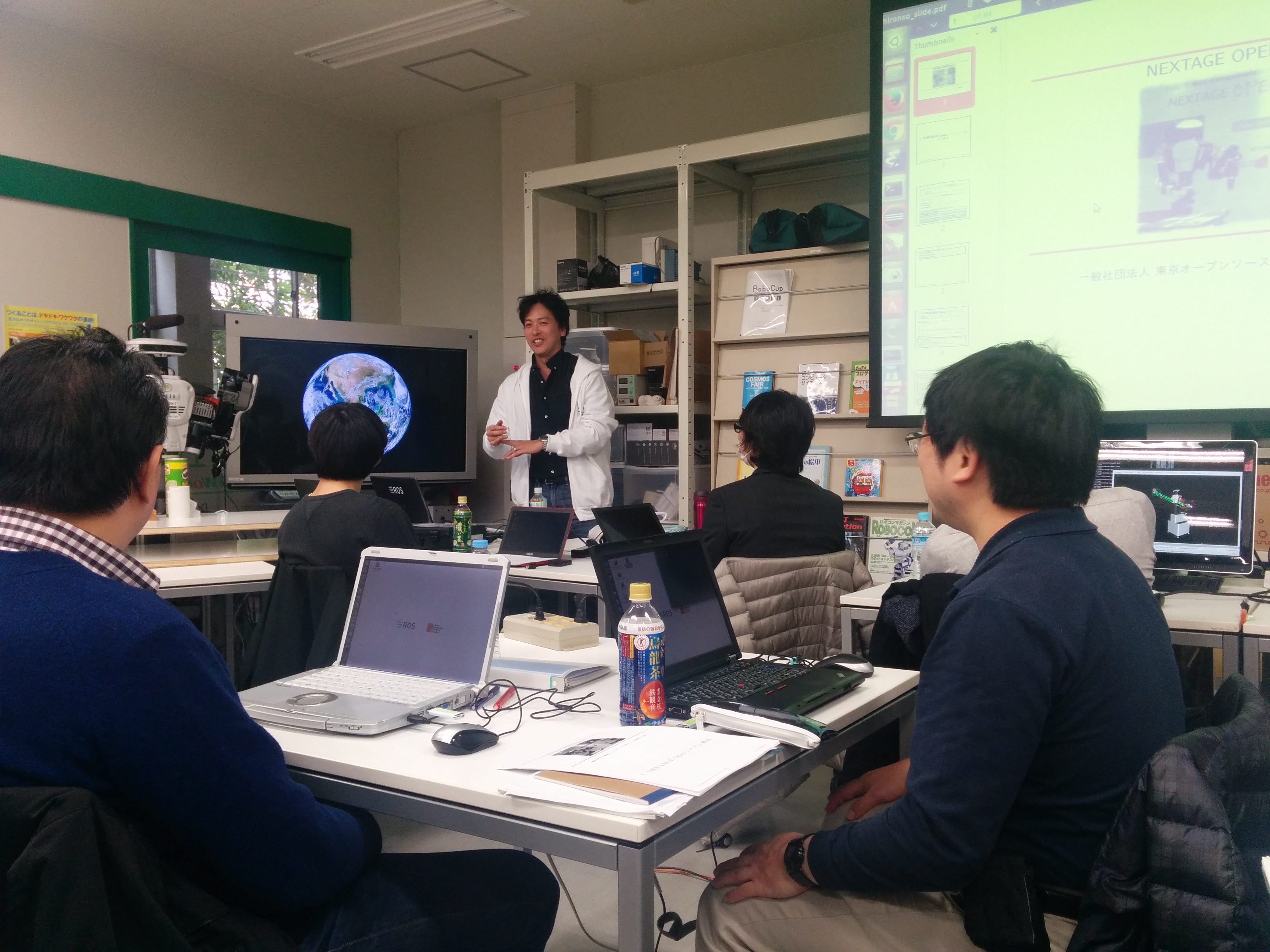
- 第三回(ROS+HIROセミナー特別編)
- ロボット制御用のオープンソースソフトウェア ROS と OpenRTM を用いたロボットの動作例として双腕ロボット.動作計画ツール MoveIt!,体外に設置した点群カメラを用いた障害物を考慮した動作生成や,手先カメラで認識したマーカを掴む等,既存ユーザから要望の高い認識を用いたアプリケーション例を体験する.
ROS Workshop for Beginners on JanuaryROSワークショップ初級編を開催しました
We also had ROS Workshop at Yushima, Tokyo.
The beginner course’s last topic is Moveit! installation and it’s experience.
It’s the best workshop for a beginner at ROS and Moveit!.
Thanks you for joining us!!
今回も湯島のミーティングスペースにてROSワークショップ初級編を開催しました.
初級編の最後の章はMoveit!のインストールと操作体験です.
ROSを初めて学習される方に最適なワークショップとなっております.
Linux環境が準備出来ない方もLiveUSBにてハンズオン講習を体験することができます.
2-3月のワークショップ日程も公開中です.
https://opensource-robotics.tokyo.jp/?p=1364
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
お申込みお問い合わせお待ちしております!
ROSを初めて勉強する時に
ROSを初めて勉強する時には何をしたら良いかという質問をいただくことが多くなりましたので
少しまとめてみました.
■ROSWiki,チュートリアル
ROSのwikiには概要も詳細も含まれています.英語がメインですが日本語もあります.
http://wiki.ros.org/
http://wiki.ros.org/ja
また,チュートリアルを一通りやってみると,どのような要素が含まれているのかを掴み使い方を知ることが出来ます.
http://wiki.ros.org/ja/ROS/Tutorials
◆Linuxに触れるのが初めてという方は,Linuxの使い方がまとまったサイトなどを利用して
Linuxの道具の使い方を一度学んでからROSに取り掛かると,チュートリアルを実施するのがとても楽になります.
以下のページはLinuxコマンドやエディタについてとても良くまとまっていて大変おすすめです.
http://robotics.naist.jp/edu/text/?Robotics%2Flinux-command
■answers.ros.org
困ったことが出てきたら,answers.ros.orgで質問を投げましょう.
http://answers.ros.org/questions/
■ROS Japan User Group : 日本のROSコミュニティ
ROSはコミュニティが盛んです.日本のROSコミュニティにも是非参加してください.
http://www.ros-users.jp/
■日本語本:ROSではじめるロボットプログラミング―フリーのロボット用「フレームワーク」 小倉 崇
Webの情報だけは体系がつかみにくい場合があります.本の流れに従って学習を進めることで理解しやすい人もいますのでおすすめしています.
http://www.amazon.co.jp/dp/4777519015/ref=cm_sw_r_tw_dp_H5vCwb1ZHF61C
■無料配布本:詳説 ROSロボットプログラミング Kurazume Laboratory
PDFで配布されています.無料で配布されていますが大変ボリュームがあり解説も大変詳しいです.使いたい機能の章だけを参照するという使い方もできます.
http://irvs.github.io/rosbook_jp/
■ROSワークショップ
もちろん弊社のROSワークショップ初級編もお薦めです.ROSを使ってハードを動かすところまで体験できます.
ROSワークショップ初級編
ROSを初めて勉強する方や途中であやふやになってしまった方は,上記リンクを参考にROSを体験してみてはいかがでしょうか.
2016年も引き続きワークショップを開催いたします.お申込みお待ちしております!

ROS Workshop Schedule, from January to March 20162016年1月-3月のROSワークショップ日程
Here are the schedule of our ROS workshop series during the first three months of 2016!
Jan. 08 Fri 13:30- Introductory
Jan. 22 Fri 13:30- Introductory
Feb. 18 Thu 10:00- Intermediate
Feb. 25 Fri 13:30- Introductory
Mar. 04 Fri 13:30- Introductory
Mar. 17 Thu 10:00- Intermediate
Venue: Yushima, Tokyo
Inquiries: info[at]opensource-robotics.tokyo.jp
以下日程でROSワークショップを行います.
1月08日(金)13:30~ ROSワークショップ初級編
1月22日(金)13:30~ ROSワークショップ初級編
2月18日(木)10:00~ ROSワークショップ中級・マニピュレーション編
2月25日(木)13:30~ ROSワークショップ初級編
3月04日(金)13:30~ ROSワークショップ初級編
3月17日(木)10:00~ ROSワークショップ中級・マニピュレーション編
場所については湯島のミーティングスペースでの実施を予定しています.
お申込みは以下より詳細をご確認の上,ページ内のお申込みリンクよりエントリをお願い致します.
ROSワークショップ初級編
ROSワークショップ中級・マニピュレーション編
日程の調整,その他ご相談,企業内ワークショップも承っております.お気軽にご相談ください.
info[at]opensource-robotics.tokyo.jp
ROS Workshop for Intermediate Manipulation ROSワークショップ中級・マニピュレーション編を開催しました
We also had ROS Workshop for Intermediate Manipulation at Yushima, Tokyo.
The participant wants to know how to use MoveIt! with a new robot arm. It’s the best workshop for a beginner at MoveIt!.
He takes part a workshop using our LiveUSB. You can experience ROS workshop by the LiveUSB without installation of Ubuntu on your machine.
Thanks you for joining us!!

今回も湯島のミーティングスペースにて,ROSワークショップ中級・マニピュレーション編を開催しました.
Moveit!の使い方を習得したいとのことで今回のワークショップへご参加いただきました.
中級・マニピュレーション編はロボットアームを作成して動かす際にMoveIt!を活用しており,初めてMoveIt! を使う方の導入としても最適です.
また,マシン環境を変更出来ない場合でも,弊社のLiveUSBを使ってワークショップを体験することができます.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
長時間の講習お疲れ様でした.ありがとうございました.
ROS Workshop Schedule, Dec. 20152015年12月のワークショップ日程
Here are the schedule of our ROS workshop series for the last month of 2015!
Dec 11 Fri 13:30- Introductory
Dec 17 Thu 10:00- Intermediate
Venue: Yushima, Tokyo
Inquiries: info[at]opensource-robotics.tokyo.jp
以下日程でROSワークショップを行います.
12月11日(金)13:30~ ROSワークショップ初級編
12月17日(木)10:00~ ROSワークショップ中級・マニピュレーション編
場所については湯島のミーティングスペースでの実施を予定しています.
お申込みは以下より詳細をご確認の上,ページ内のお申込みリンクよりエントリをお願い致します.
ROSワークショップ初級編
ROSワークショップ中級・マニピュレーション編
その他ご相談,企業内ワークショップも承っております.お気軽にご相談ください.
info[at]opensource-robotics.tokyo.jp