
Roomblock(4): Low Cost LIDAR: RPLIDAR A2
In the previous post, we explained the Raspberry Pi, which communicate with Roomba.
Roomblock is using a low cost RPLIDAR A2.
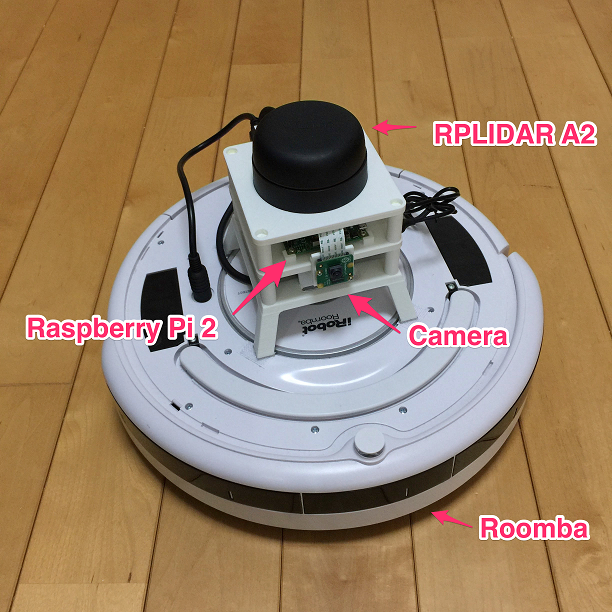
This is very easy to use, and low cost.

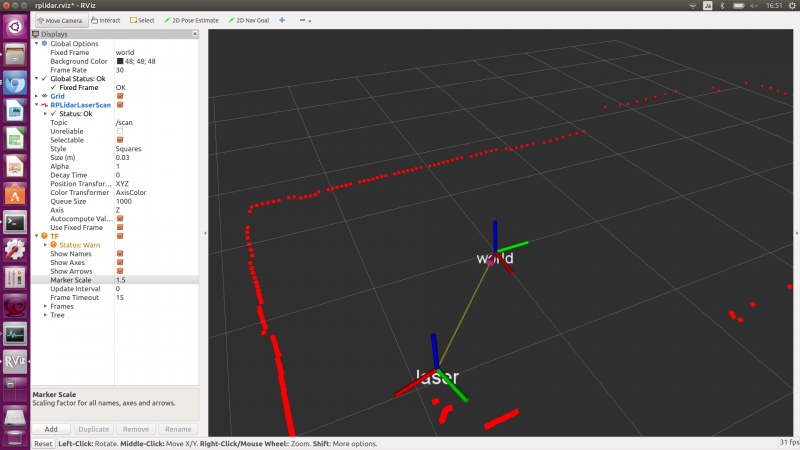
Range data in rviz
This sensor is ROS-ready. You can view the data by typing one command line.
Scan matching
laser_scan_matcher package help you to estimate sensor’s motion only from the laser scan data by scan matching.
In the next post, we’ll show the 3D Printable frame structure for Roomblock.
We share how to build Roomblock at Instructables. Please try it at your own risk.
Ryosuke Tajima administrator
About the author