Low-cost LIDARs(2) Specification
Product Specifications
In the previous post, we introduced low-cost LIDARs.
Let’s compare the specifications of the sensors.
It is an important precaution!
- Be sure to check the specifications by yourself when you actually use it!
- TORK can not take responsibility even if your project does not work out due to errors in this article!
Principle
For industrial LIDAR, distance measurement by ToF (Time of Flight) method is often used. This is a method of calculating the distance by measuring the time until the laser light is reflected by the object and returned to the sensor. Sweep uses the ToF method to measure distance. On the other hand, RPLIDAR A2 uses the principle of triangulation instead of ToF. This is a method of measuring the distance to the reflection point by measuring the displacement of the light receiving point with a sensor. The light emitting point, the reflection point and the light receiving point constitute a triangle, I believe you may know already.
Triangulation generally seems easier in general, but as the distance to the reflection point increases, even if reflected light can be measured, the resolution of distance decreases. On the other hand, the ToF can increase the maximum measuring distance because the resolution does not decrease even if the distance to the reflection point increases (as far as the reflected light can be measured).
There is another big difference. For RPLIDAR A2, sampling is done in synchronization with the angle. In other words, the angle of the laser to be measured is the same for each rotation (even if there are delicate variation actually). On the other hand, although Sweep is synchronized with the scan start at the angle 0 position, each distance measurement is not synchronized with the angle. From the specification of Sweep, the data obtained from the sensor is a set of angle and distance. The laser that Sweep emits has a pattern rather than a single pulse, so the sample rate is not constant (default is 500 to 600 Hz), so it seems to be like this.
High-end two-dimensional LIDAR such as URG and SICK is a method that can acquire distance synchronized with angle, so it seems that Sweep’s method is a bit difficult to use.
Angle resolution, measurement cycle, sample rate
As an important performance in LIDAR, there is angle resolution and measurement cycle. The angular resolution is the fineness of the angle of the measurement point. When the resolution is low, the measurement points of the object and the environment are too small, and the shape of the measurement is not well understood. The measurement period is the time taken for one scan (one rotation), and when the measurement cycle is large, accurate measurement becomes difficult when measuring a moving object or when the robot itself moves.
Both of the sensors are measuring the surrounding by rotating the part where the light source and the measurement part are integrated. RPLIDAR A2 has variable rotation speed from 5 Hz to 15 Hz, but the number of measurement points is the same (400 points) regardless of the rotation speed.
Sweep has a variable rotation speed from 1 Hz to 10 Hz, but since the sample rate is 1000 samples / sec at maximum (precisely 1000 to 1025), the faster the rotation speed is, the measurement points per revolution is getting lesser.
- RPLIDAR A2: 400 samples / rotation
- Sweep: 1000 samples / sec
If both are rotating at 10 Hz,
- RPLIDAR a 2: 400 samples / rotation
- Sweep: 100 samples / rotation
Therefore, RPLIDAR A2 has an angular resolution four times higher. If you want to obtain the same resolution with Sweep, you need to rotate the cycle at 1/4 (2.5 Hz).
Maximum measurement distance and distance resolution
Maximum measurement distance is also important performance. It seems better to measure distantly, however, from the experience 10m is enough for office navigation, and 100 m will not be enough for applications like automatic driving. It depends the application.
RPLIDAR A2, confusingly, the measurement distance is different depending on the model. Attention is required for model number when purchasing. This time I used RPLIDAR A2M8 with a measuring distance of up to 8 m.
- RPLIDAR A2M4 Maximum measurement distance 6 m
- RPLIDAR A2M8 Maximum measurement distance 8 m
- RPLIDAR A2M6 Maximum measurement distance 16 m
On the other hand, Sweep has a maximum measurement distance of 40 m.
By the way, the minimum measurement distance, which is the limit of the near side, is about the same.
- RPLIDAR A 2 M 8 minimum measurement distance 0.15 m
- Sweep Minimum measurement distance 0.15 m
How about distance resolution? The distance resolution of RPLIDAR A2M8,
- 0.5 mm or less when 1.5 m or less
- At a distance more than 1.5m, 1% of the distance or less
The nearer the resolution is higher, so the shape of the object can be taken properly if it is close. Instead, it can be predicted that both distance and resolution will fall as the distance increases (data did not exist for errors in specifications).
On the other hand, for Sweep,
- Sweep distance resolution 1cm or less
regardless of the measurement distance. The Sweep specification also includes a graph of the distance measurement error, but you can see that the error does not increase even if the measurement distance becomes longer. It is an advantage of ToF method.
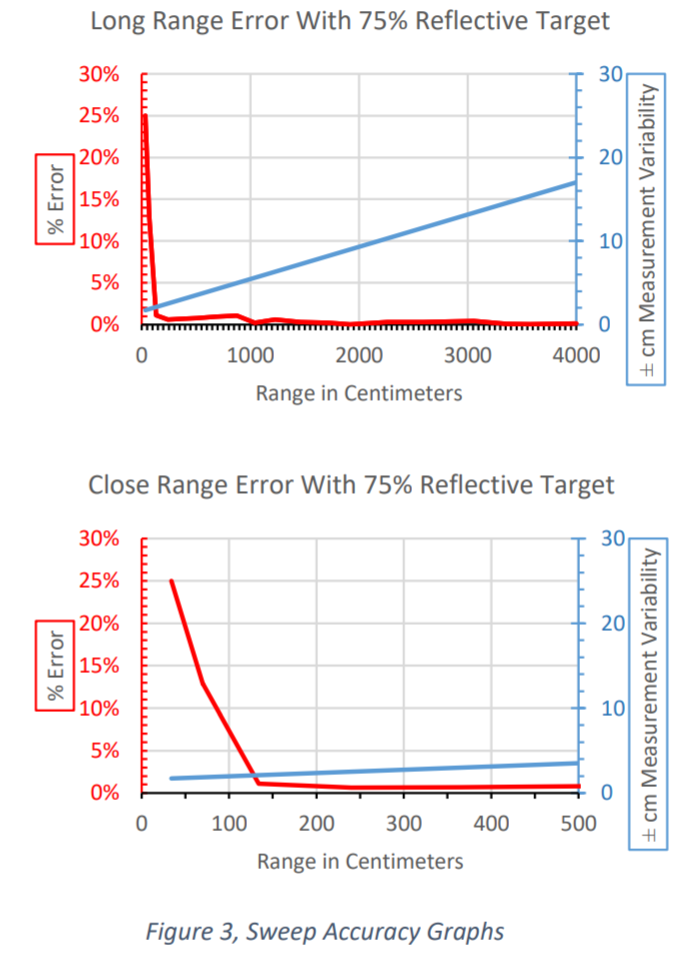
Sweep measurement error (excerpted from Sweep manual)
Others
Both are fairly small, but since the top parts rotate, installation is necessary to avoid touching them.
- RPLIDAR A2: diameter 70 mm
- Sweep: Diameter 65 mm
For Sweep, the cable connector is oriented in two directions, one side and the lower side, making it easy to wire. RPLIDAR seems to be difficult to shorten the cable length because the cable is straight out.

Connector on the back side of Sweep
When both are connected by USB, they operate with USB bus power. Also, you can communicate with a UART such as a microcomputer, but in that case you need a separate power supply.
Summary
Although it is two sensors whose outline looks the same, you can see that the design philosophy is actually slightly different. It can be said that RPLIDAR A2 is short distance, for indoor use, and Sweep is specification for long distance and outdoor use. I am afraid that angle resolution of Sweep might be low for some usages.
Ryosuke Tajima administrator
About the author