
Roomblock(5) : 3D Printable Frame Structure
Roomblock has Raspberry Pi, Mobile battery and RPLIDAR on a Roomba as described in the previous post. We need to a frame structure to make them bind.
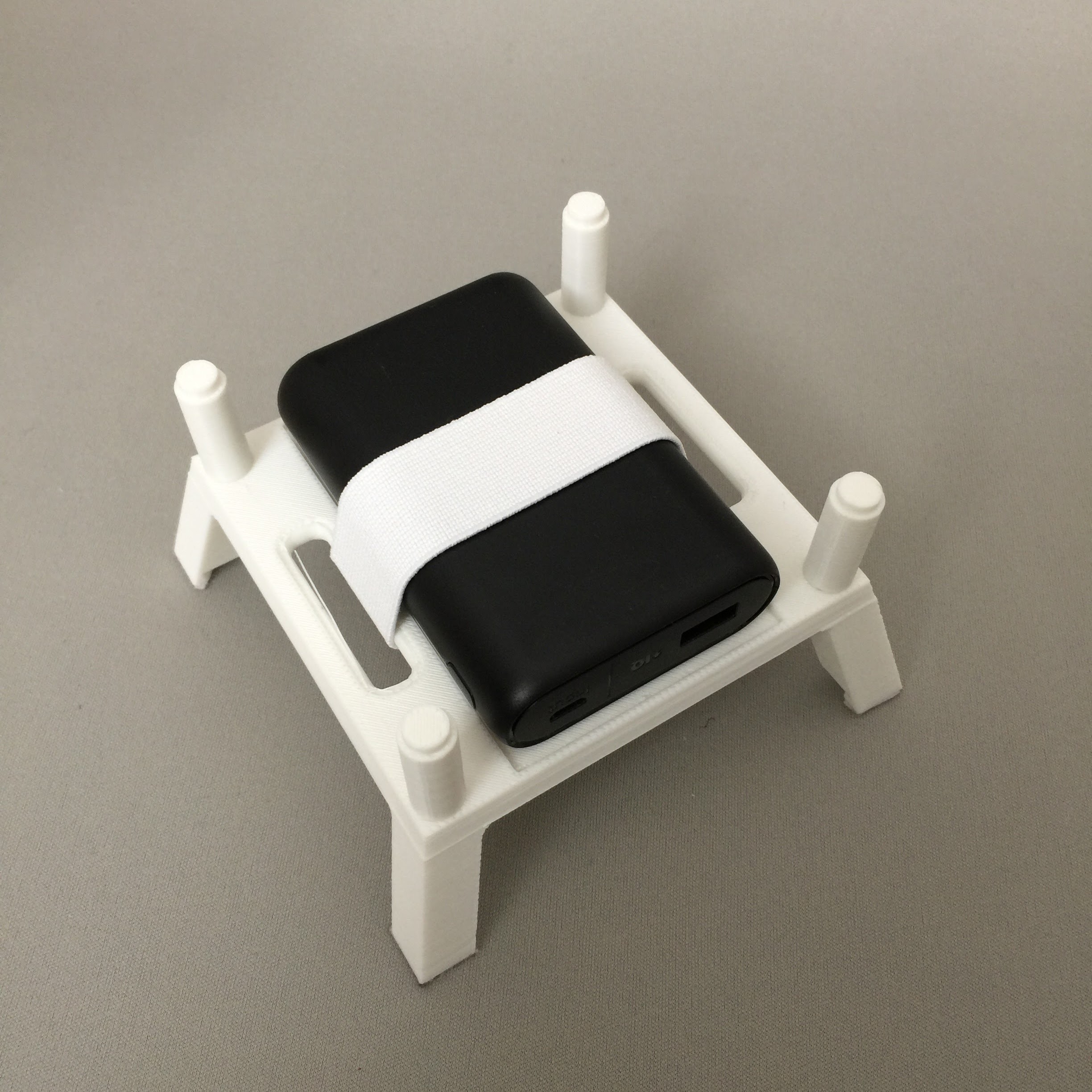
Battery stage
The frame is a extendable shelf-like structure. It consists of the first battery stage, second Raspberry Pi stage, and the top RPLIDAR stage.

Raspberry Pi stage
We named this robot Roomblock, because it is extendable like “blocks”.

Roomblock’s frame
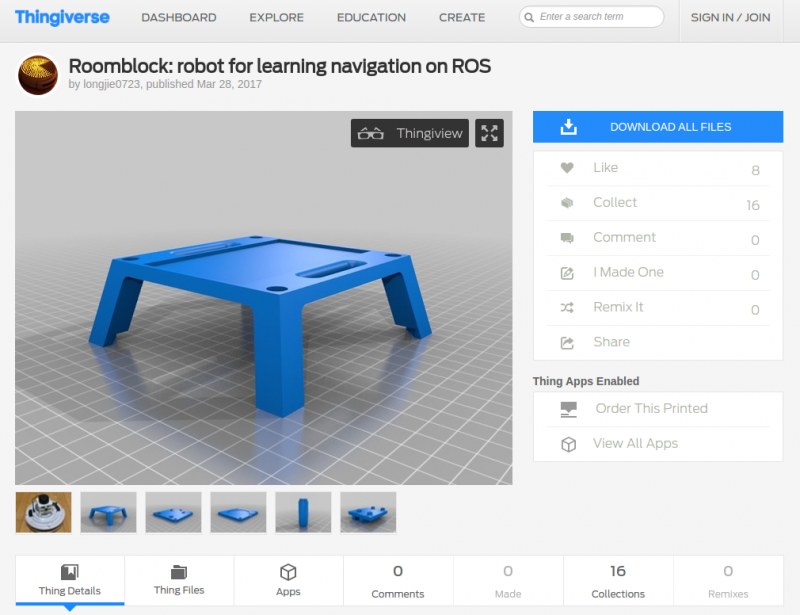
We publish the STL file for 3D printing, so that you can print it out with your own 3D printer. Please check the Thingiverse site.
We share how to build Roomblock at Instructables. Please try it at your own risk.

Roomblock(4): Low Cost LIDAR: RPLIDAR A2
In the previous post, we explained the Raspberry Pi, which communicate with Roomba.
Roomblock is using a low cost RPLIDAR A2.
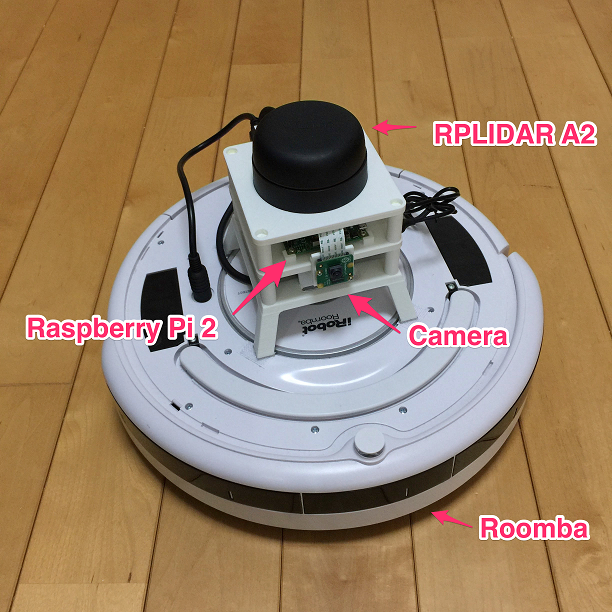
This is very easy to use, and low cost.

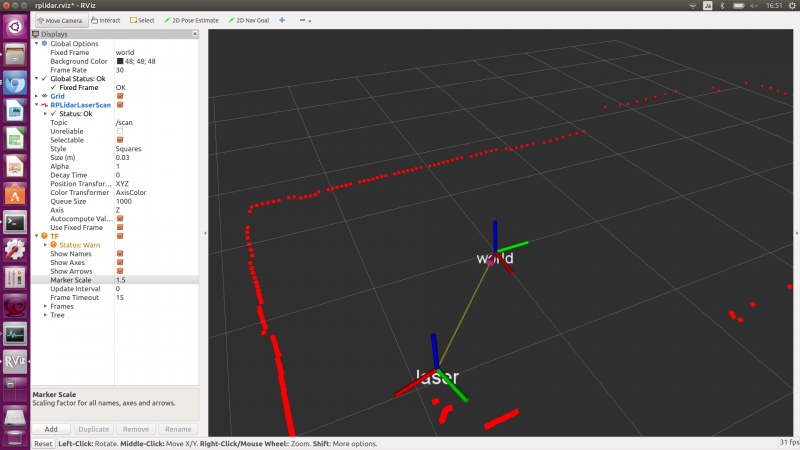
Range data in rviz
This sensor is ROS-ready. You can view the data by typing one command line.
Scan matching
laser_scan_matcher package help you to estimate sensor’s motion only from the laser scan data by scan matching.
In the next post, we’ll show the 3D Printable frame structure for Roomblock.
We share how to build Roomblock at Instructables. Please try it at your own risk.
Roomblock: Autonomous Robot using Roomba, Raspberry Pi, and RPLIDAR(3)
In the previous post, we introduced ROI connector to communicate with Roomba. Roomblock is controlled by a Raspberry Pi. As you know, Raspberry Pi is low cost ARM based board computer. We use Raspberry Pi 2, Ubuntu and ROS are installed on it.

Raspberry Pi 2
The ROI connector on the Roomba and Roomblock are connected with a USB-serial adapter cable.

USB-Serial adapter cable

In the next post, we will explain LIDAR for Roomblock.
We share how to build Roomblock at Instructables. Please try it at your own risk.
Roomblock: Autonomous Robot using Roomba, Raspberry Pi, and RPLIDAR (2)
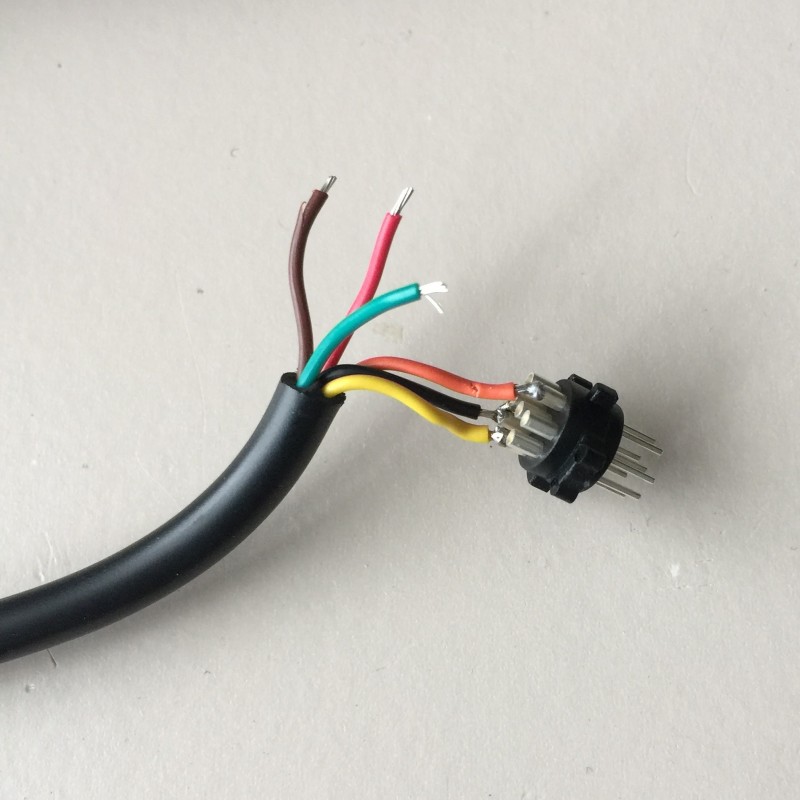
You can use Roomba 500, 600, 700 and 800 series as a base of Roomblock,which we introduced in the previous post. They have a serial port to communicate with external computers. Notice the flagship model Roomba 900 series have no serial port, so you cannot use it.
You can see the serial port as the picture shows. Be careful not to cut your fingers or break your Roomba!


Roomba 500 series ROI connector


Roomba 700 series ROI connector
In the next post, we will show how to connect Raspberry Pi computer and Roomba.
We share how to build Roomblock at Instructables. Please try it at your own risk.

Mapping Experiment in a Large Building
We did very loose evaluation of ROS mapping packages with a relatively large scale building including loop closure. The loop closure is difficult issue for mapping, and it shows some package can close the loop even with the default parameters.
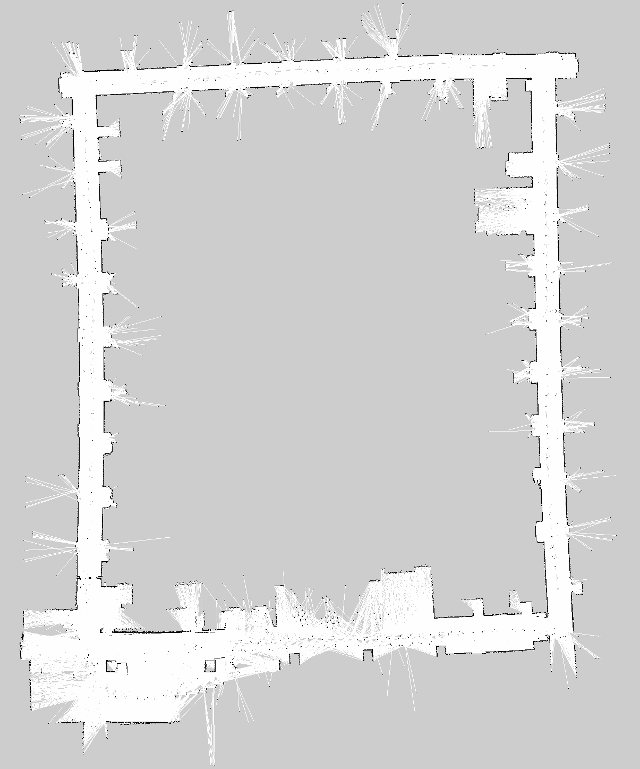
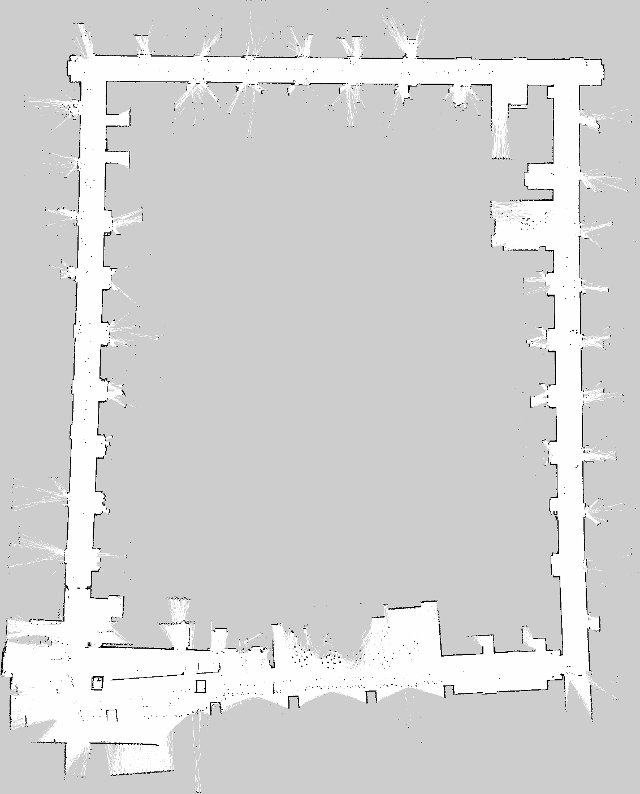
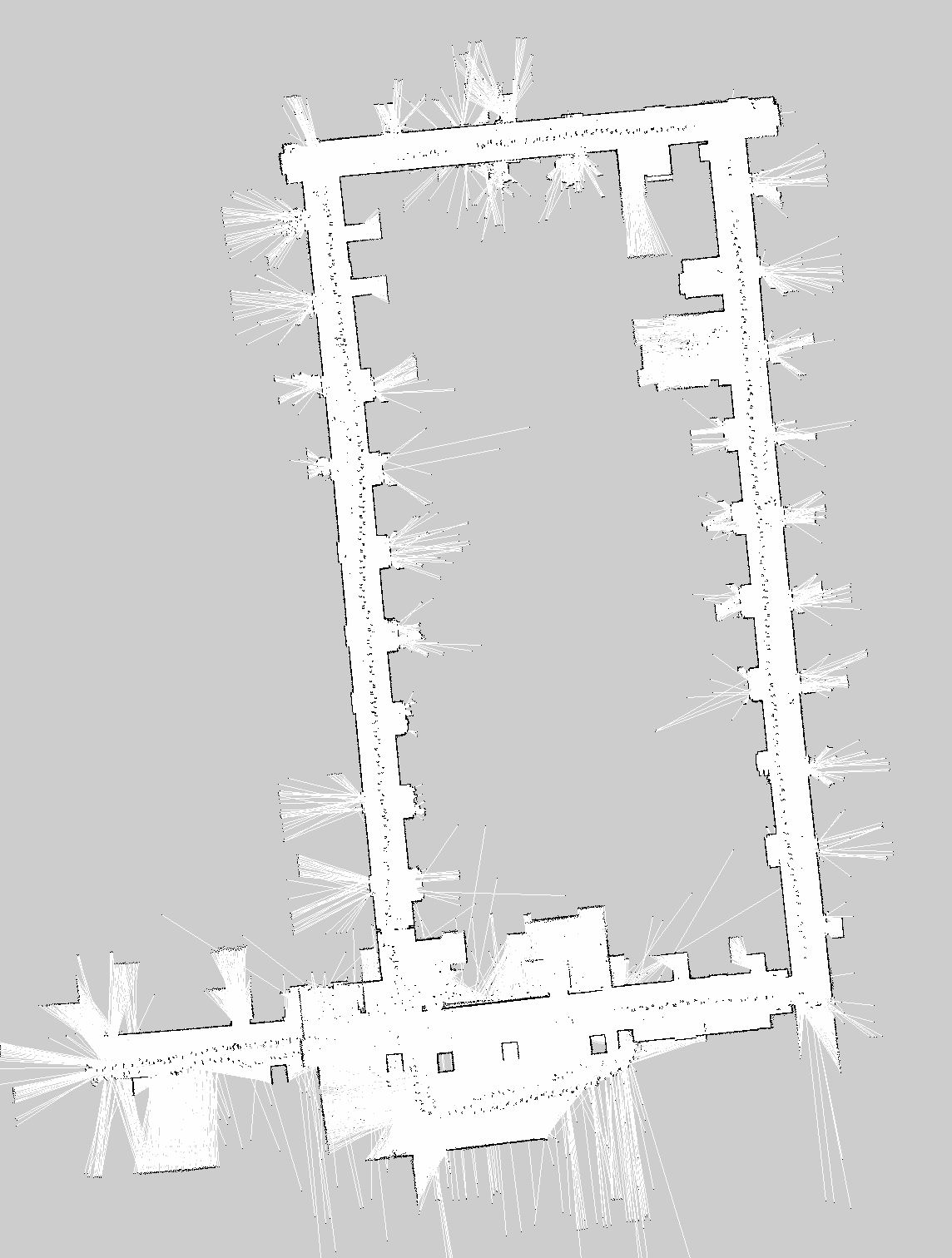
Generated map(from left, gmapping, slam_karto, hector_slam, cartographer)
Notice, this result doesn’t compare true efficiency of each algorithm. We just use nearly default parameters for each package. We recommend you to select mapping packages for your problem by yourself. ROS is suitable for doing it.
Roomblock: Autonomous Robot using Roomba, Raspberry Pi, and RPLIDAR(1)
We are using a robot named “Roomblock” as a material of ROS workshop. Roomba is wonderful not only for room cleaning, but also for learning robotics. Roomba has an serial port to communicate with PC, and of course, ROS system.

You can convince your family to buy a Roomba, of course for cleaning 🙂

The first Roomba I bought in 2007, broken now 🙁
In the next post, we’ll show more about the Serial Port for Roomba to communicate with PC.
We share how to build Roomblock at Instructables. Please try it at your own risk.

Autonomous Navigation Demo and Experiments at Meijo Univ.
We had a chance to perform a demo and experiments of our autonomous navigation robot at Meijo University, Nagoya, Aichi. Our Roomba based autonomous robot “Roomblock” could impress the students. ROS would help them to accelerate their study.


And we can do mapping experiments with the robot in a beautiful campus building. We are going to report the result in following posts.

