
Mapping Experiment in a Large Building
We did very loose evaluation of ROS mapping packages with a relatively large scale building including loop closure. The loop closure is difficult issue for mapping, and it shows some package can close the loop even with the default parameters.
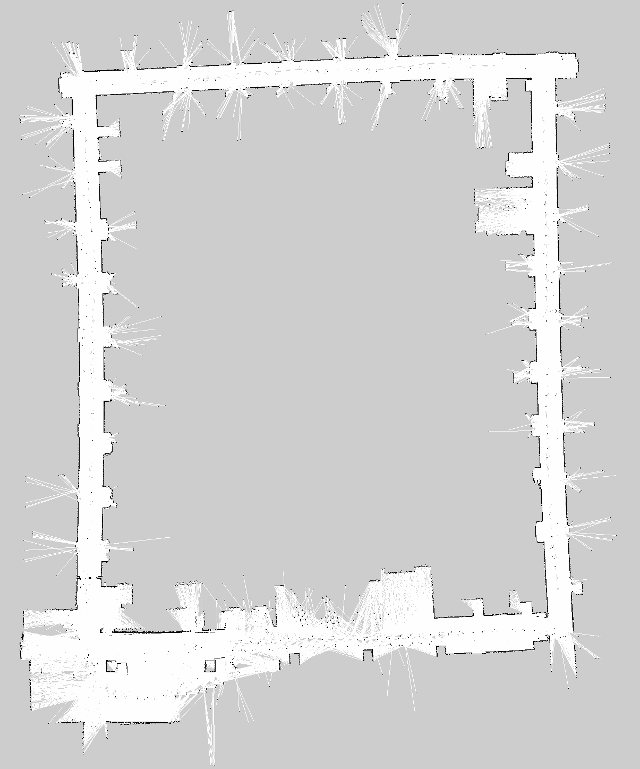
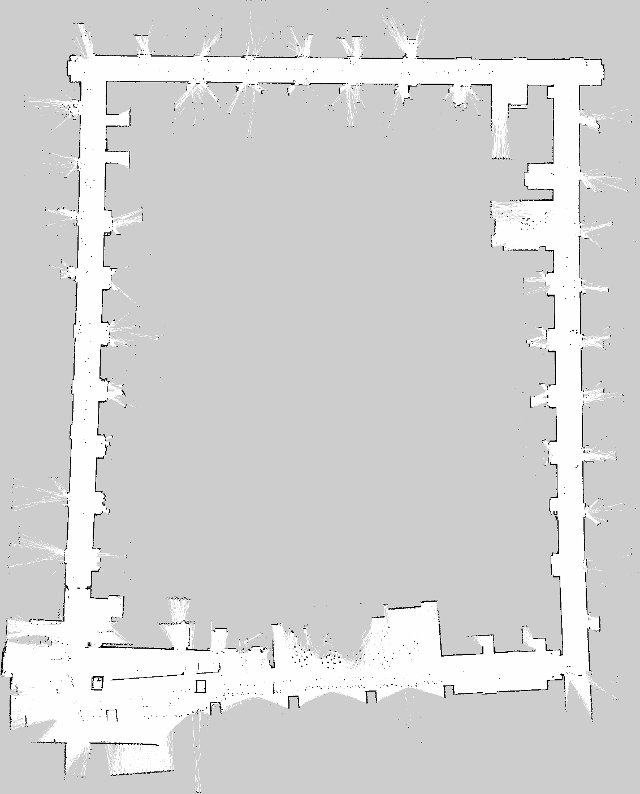
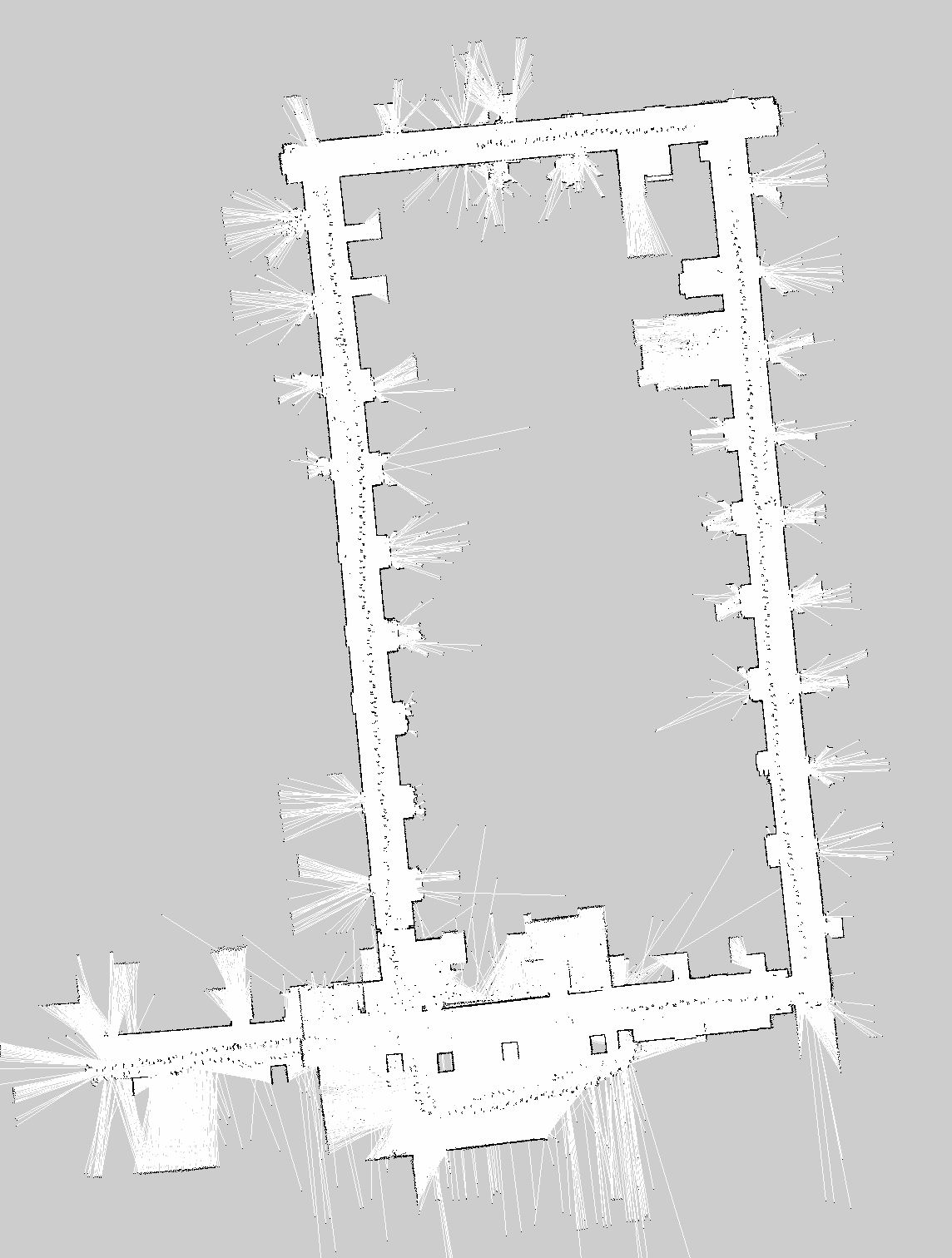
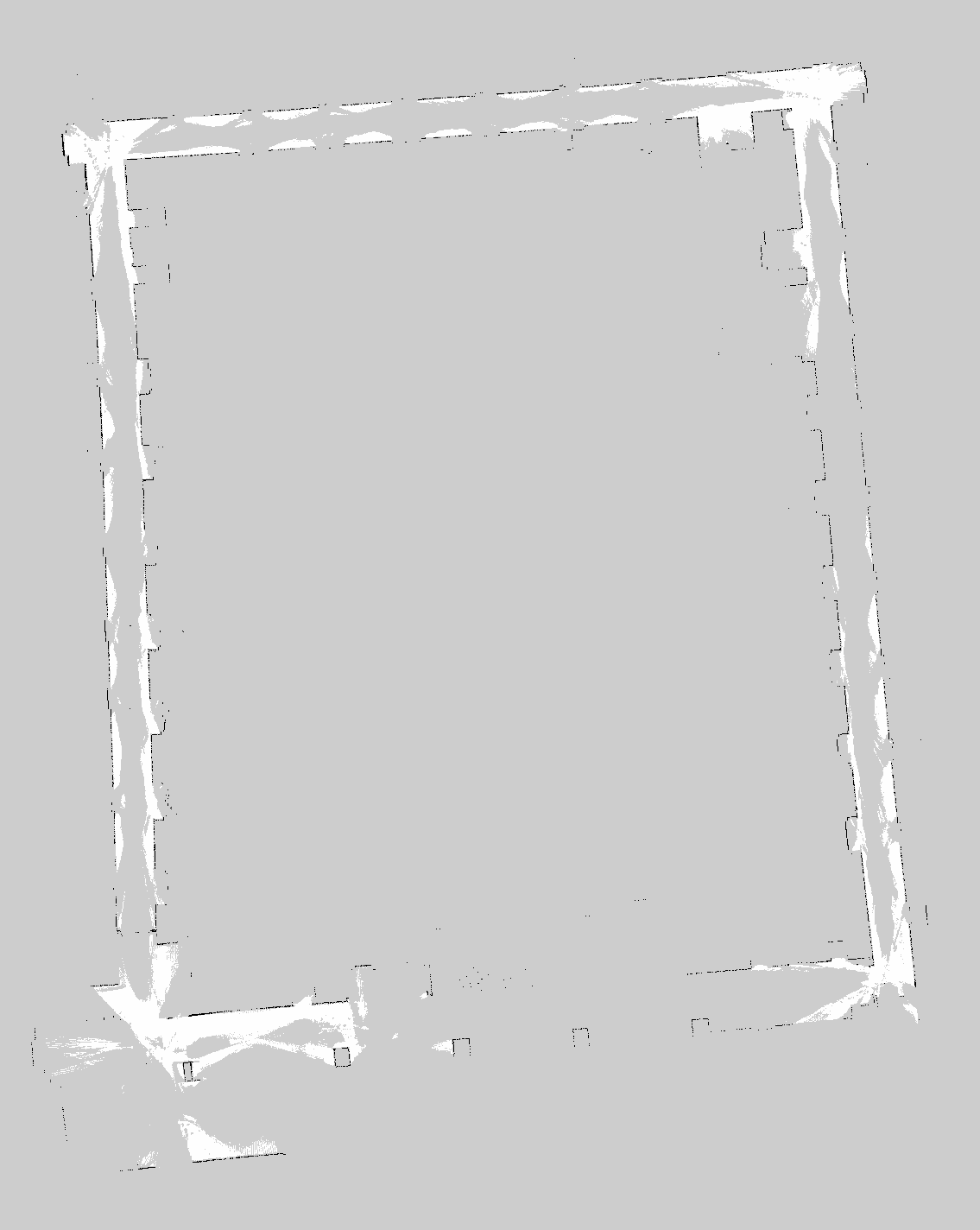
Generated map(from left, gmapping, slam_karto, hector_slam, cartographer)
Notice, this result doesn’t compare true efficiency of each algorithm. We just use nearly default parameters for each package. We recommend you to select mapping packages for your problem by yourself. ROS is suitable for doing it.