World MoveIt! Day 2018 in Kashiwa-no-ha was held
World MoveIt! Day 2018 in Kashiwa-no-ha was held last Friday! I will introduce the state of the day by photograph. I hope to share the atmosphere with who could not participate.
State before opening

We are ready for start!
Opening
Finally the World MoveIt! Day 2018 in Kashiwa-no-ha started! There was explanation about an example of challenge at the hackathon.
TORK Tajima’s greeting
Next, there was an introduction of the robot from the company that exhibited the robot at the venue.

Sawyer

An announcement by SEED Solutions

Presentation by Fuji Soft
Hackathon (morning) starts!
Everyone is working muzzle. There were some people who tried the program on actual machines.

Hackathon’s appearance
Lunch
Good work every morning! It is lunch time.

The lunch we offered from Omron Sinic X Co., Ltd. was very delicious.

So yummy.
Presentation by participants
Presentation by participants began while eating lunch.
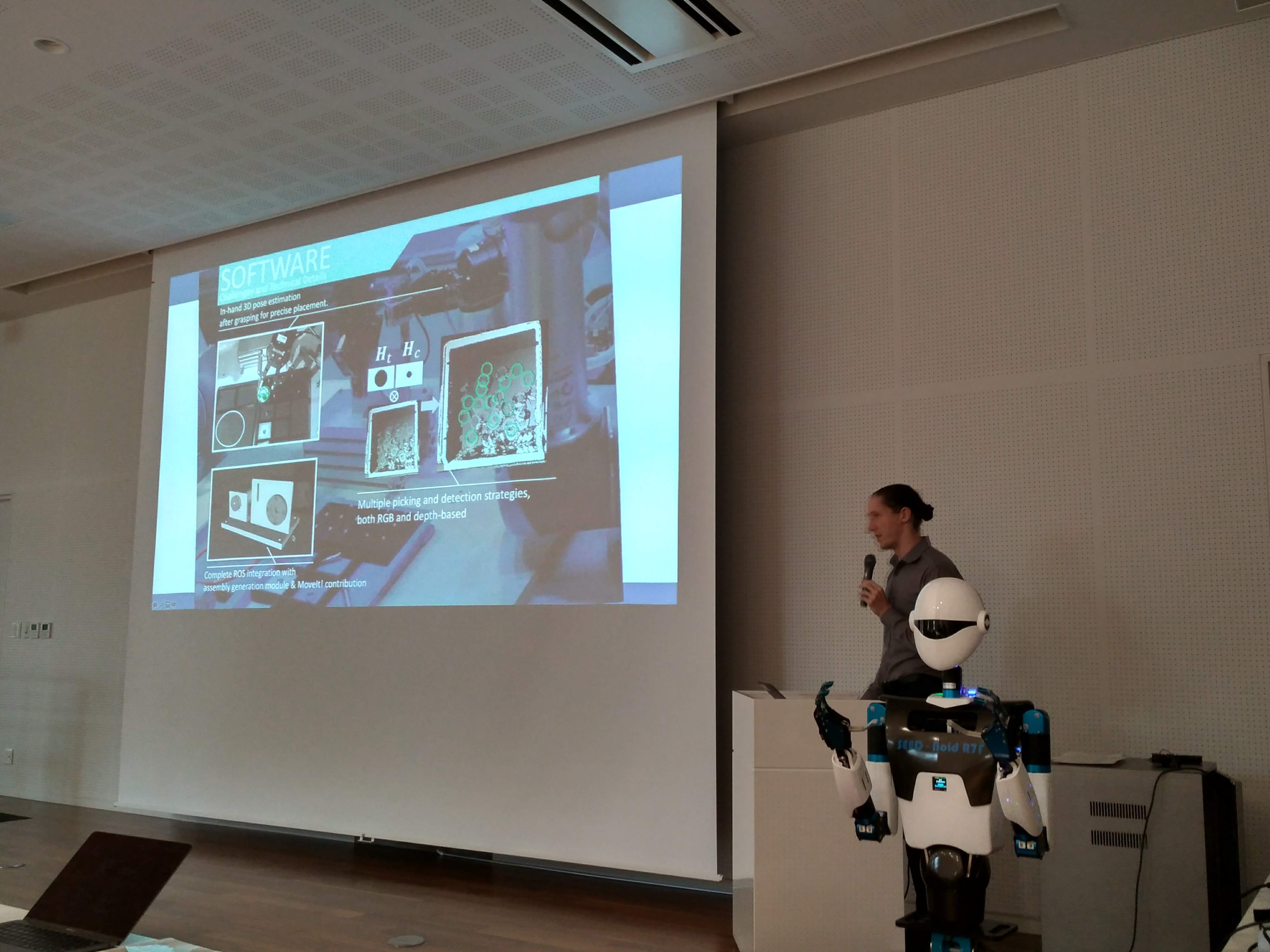
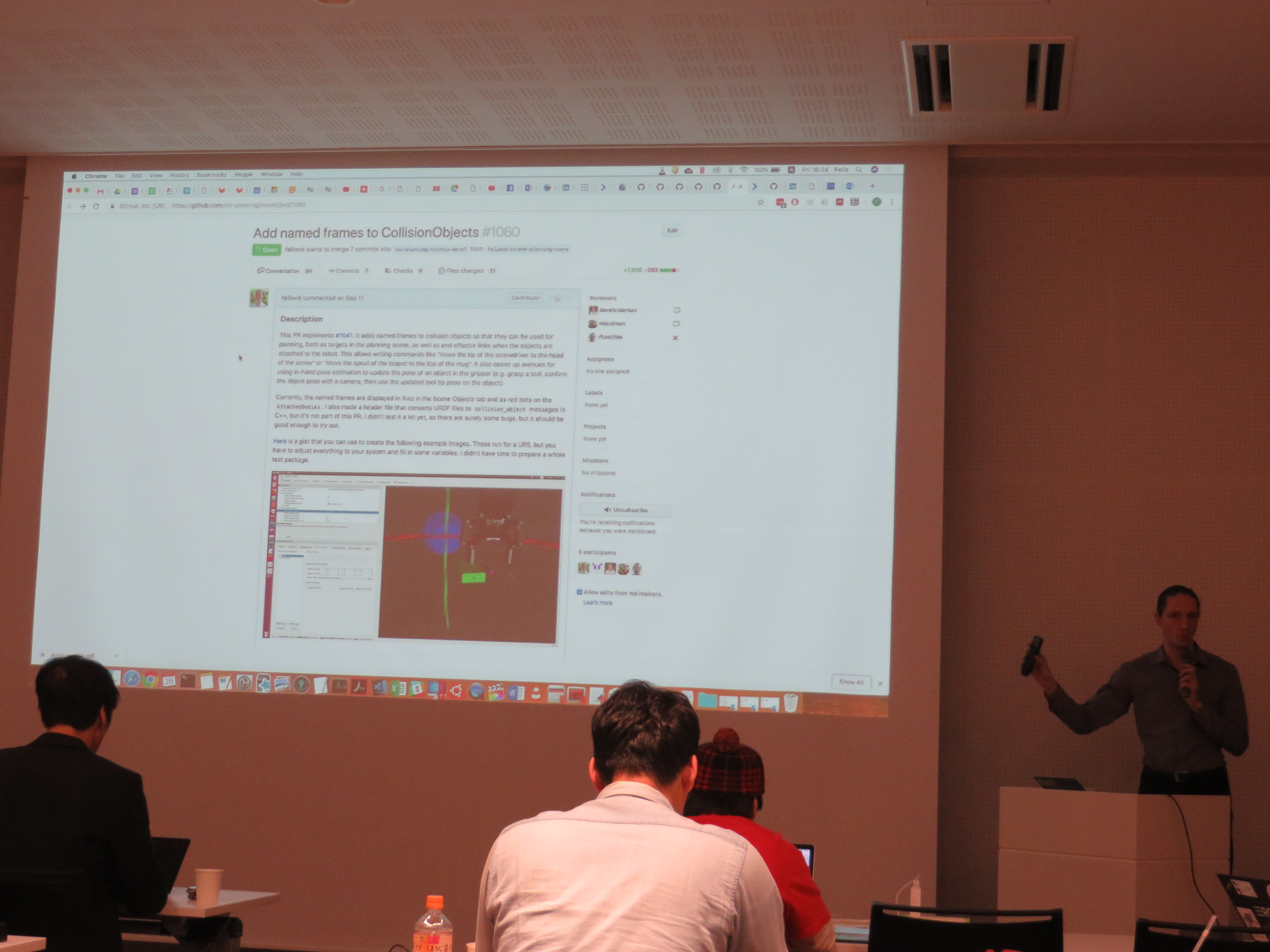
OMRON SINIC X Corporation @felixvd
An introduction of WRS2018 product assembly challenge participation report was given by Omron Sinic X Co., Ltd.

About MoveIt! Task Planning @ youtalk
He introduced about the new function of MoveIt! Task Constructor. This seems to enable parallel tasks such as moving while grabbing things that we could not do currently.
SEED-noid Introduction Mr. Kondo
The practical example of SEED-noid given by Seed Solutions, through the story of demonstration experiment at a competition set in a convenience store and a restaurant.
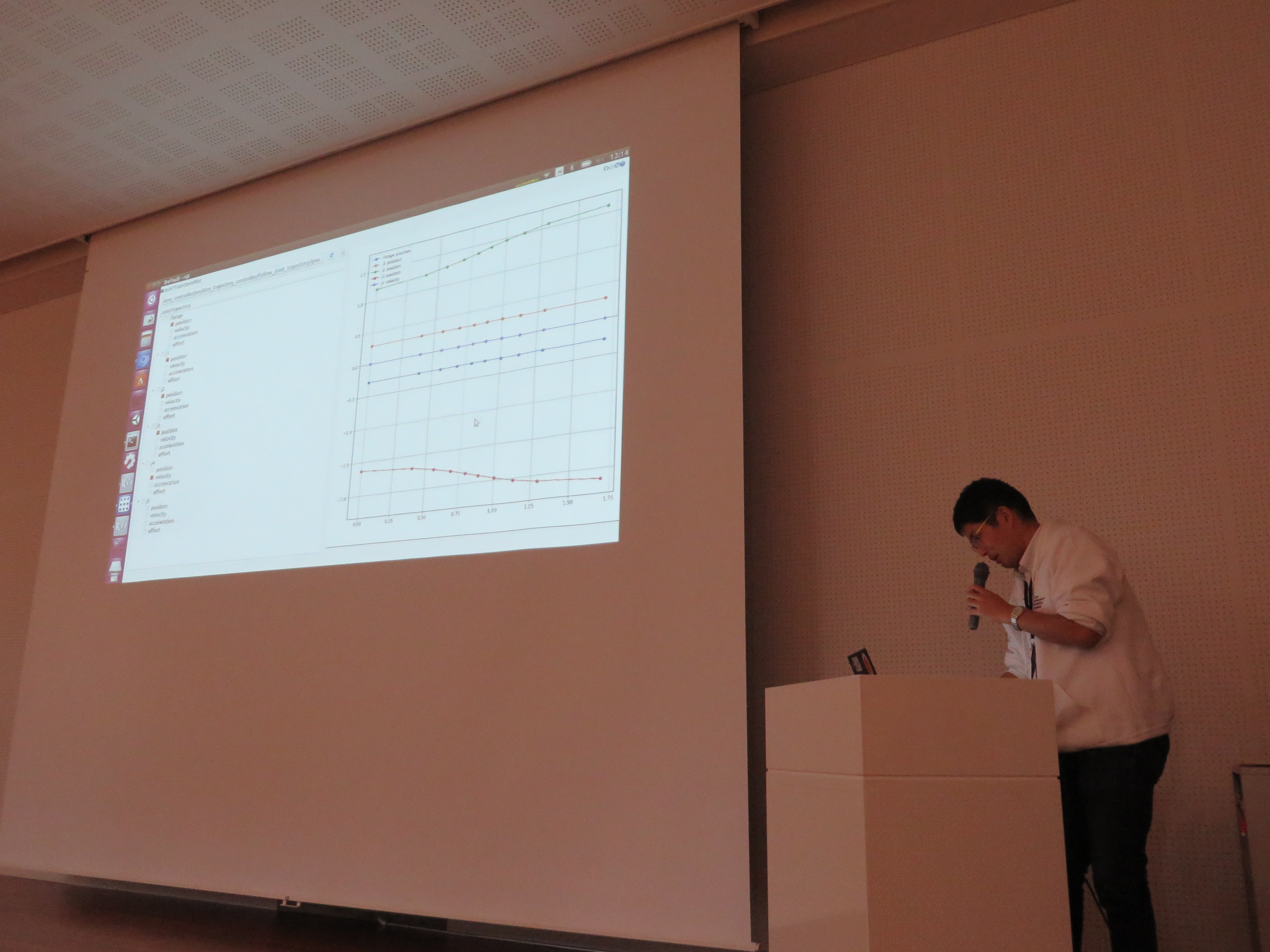
Introduction of JointTrajectoryPlot Taoka (TORK)
It is an introduction of useful tools when you want to know the angle of each joint when moving the robot with MoveIt!
Hackathon (afternoon) starts!
When the presentation is over, Hackathon is resuming.

As in the morning, quiet and calm time flows.
Achievement presentation
Thank you for your hard work! Hackathon is over. Time to present we worked on today all day.
Hold Kamehame-ha gesture with SEED-Noid Mover (Use MoveIt! On actual machine)

Move the new robot’s product with gazebo using MoveIt! (ROBOTIS-sama)

Add information on new robot products to MoveIt!’s homepage
To simplify collision calculation with MoveIt!, Simplify the robot’s mesh model
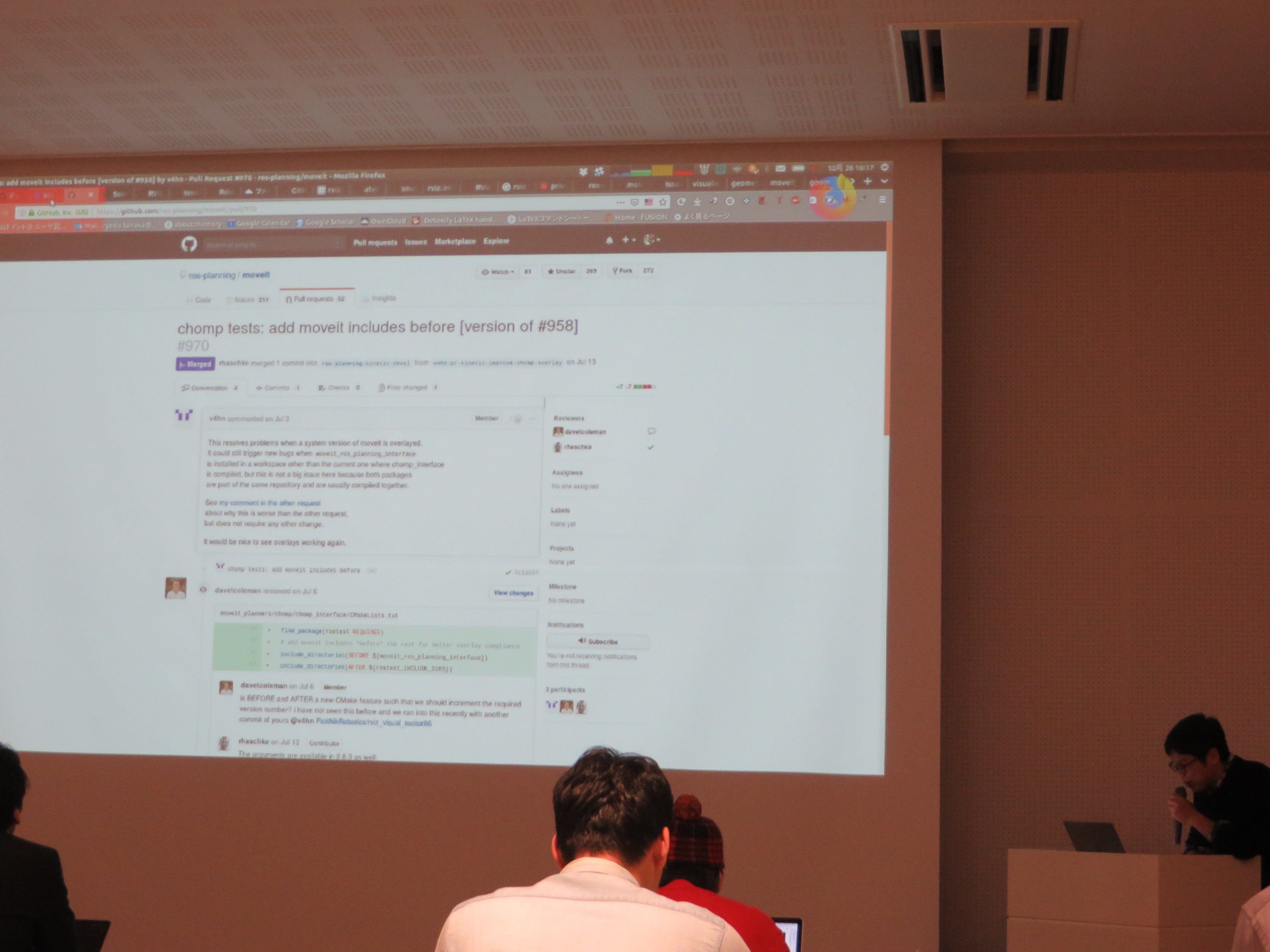
Efforts to Issue (1)
Efforts to Issue (2)

Try using JointTrajectoryPlot on gazebo
There are a lot of efforts to be helpful at the next participation!
It is a commemorative photo!
Thank you very much for all the participants! Let’s meet next year!
Ryosuke Tajima administrator
You must be logged in to post a comment.
About the author