World MoveIt! Day 2018 in 柏の葉が開催されました!
先週の金曜日にWorld MoveIt! Day 2018 in 柏の葉が開催されました! 当日の様子を写真で紹介します.参加できなかった方にも雰囲気を伝えられればと思います.
開会前の様子

準備もラストスパートに入っています.
開会式
ついにWorld MoveIt! Day 2018 in 柏の葉が始まりました! ハッカソンでの課題の例についての説明などがありました.
TORK但馬の挨拶です
次に,会場にロボットを展示していただいた企業の方からロボットのご紹介がありました.

Sawyer

SEED Solutions様の発表

富士ソフト様の発表
ハッカソン(午前の部)開始!
皆さんもくもくと作業されています.実機でプログラムを試す方もいらっしゃいました.

ハッカソンの様子
お昼ご飯
午前中はお疲れ様でした!お昼ご飯の時間です.

オムロンサイニックエックス株式会社様からご提供頂いた昼食はとても美味しかったです.

本当に美味しかったです!
参加者によるプレゼンテーション
お昼ご飯を食べながらの,参加者による発表が始まりました.
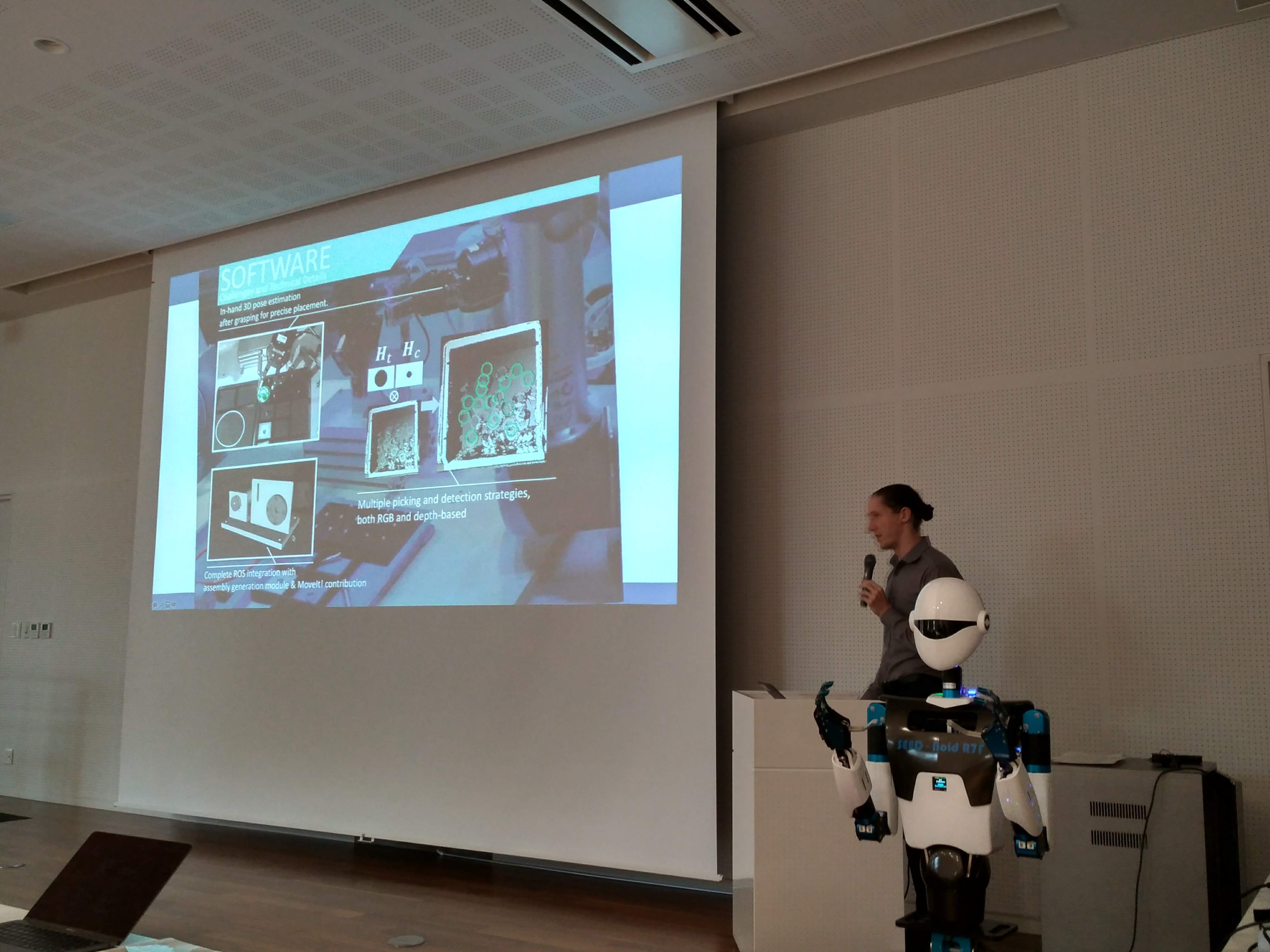
OMRON SINIC X Corporation @felixvd さん
WRS2018製品組立チャレンジ参加報告とオムロンサイニックエックス株式会社のご紹介をしてくださいました.

MoveIt! Task Planningについて @youtalk さん
MoveIt!の新機能,Task Constructorについてご紹介してくださいました.これにより,今までできなかった,物を掴みながら移動するといった,並列タスクが可能になるそうです.
SEED-noid ご紹介 近藤さん
SEED-noidの実用例を,コンビニを舞台にした競技会やレストランでの実証実験のお話などを通してご紹介くださいました.
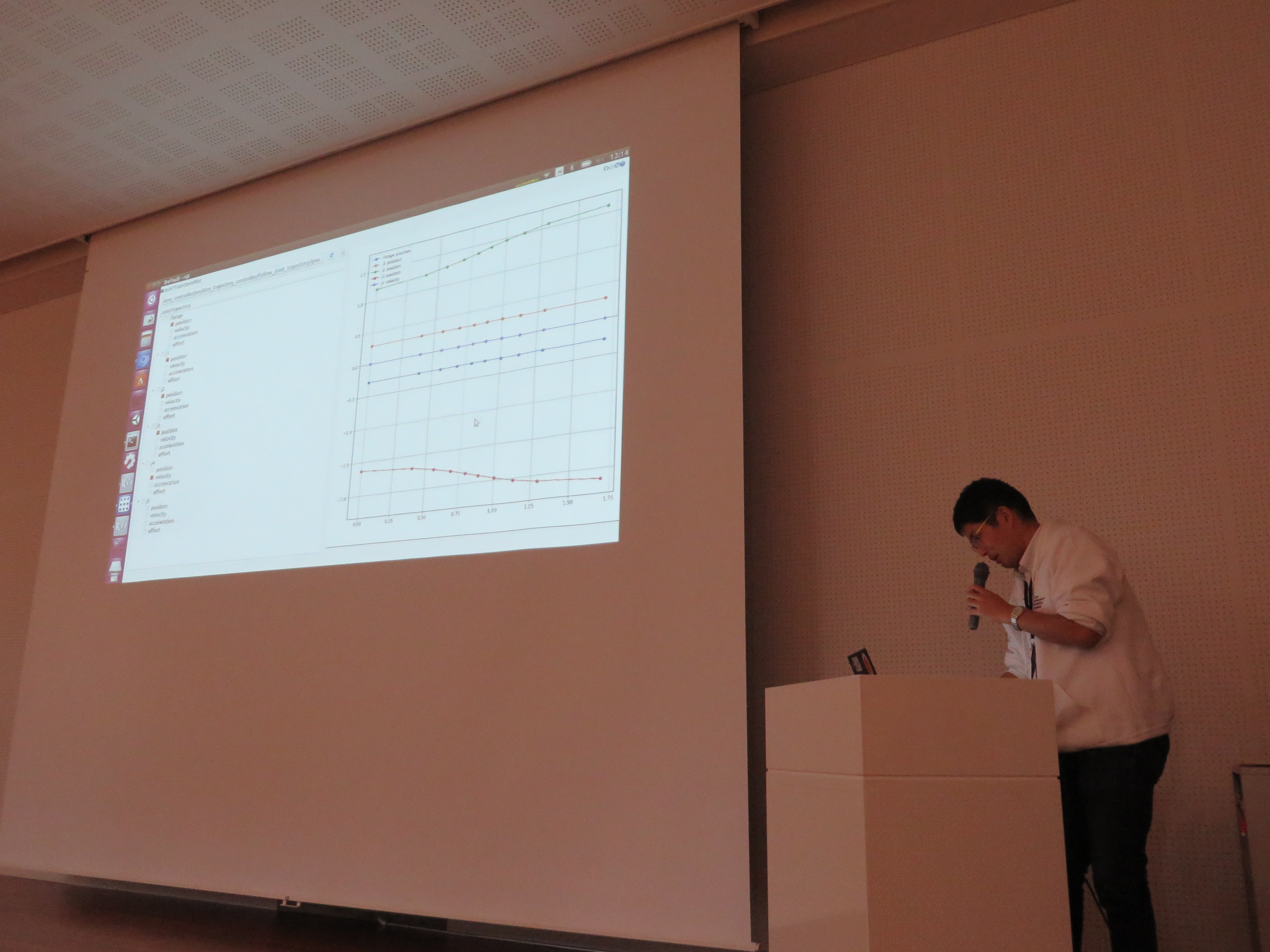
JointTrajectoryPlotのご紹介 但馬(TORK)
MoveIt!でロボットを動かす際,各関節の角度を知りたい時に便利なツールのご紹介です.
ハッカソン(午後の部)開始!
発表が終わったら,ハッカソンの再開です.

午前と同様,静かで穏やかな時間が流れます.
成果発表会
お疲れ様でした!ハッカソン終了です.今日一日何に取り組んだか,発表し合います.
SEED-Noid Moverにかめはめ波を打たせる(MoveIt!を実機で使う)

新しいロボットの製品をgazeboでMoveIt!を使って動かす(ROBOTIS様)

新しいロボットの製品の情報をMoveIt!のホームページに追加
MoveIt!での衝突計算を簡単にするために,ロボットのメッシュモデルを簡略化する
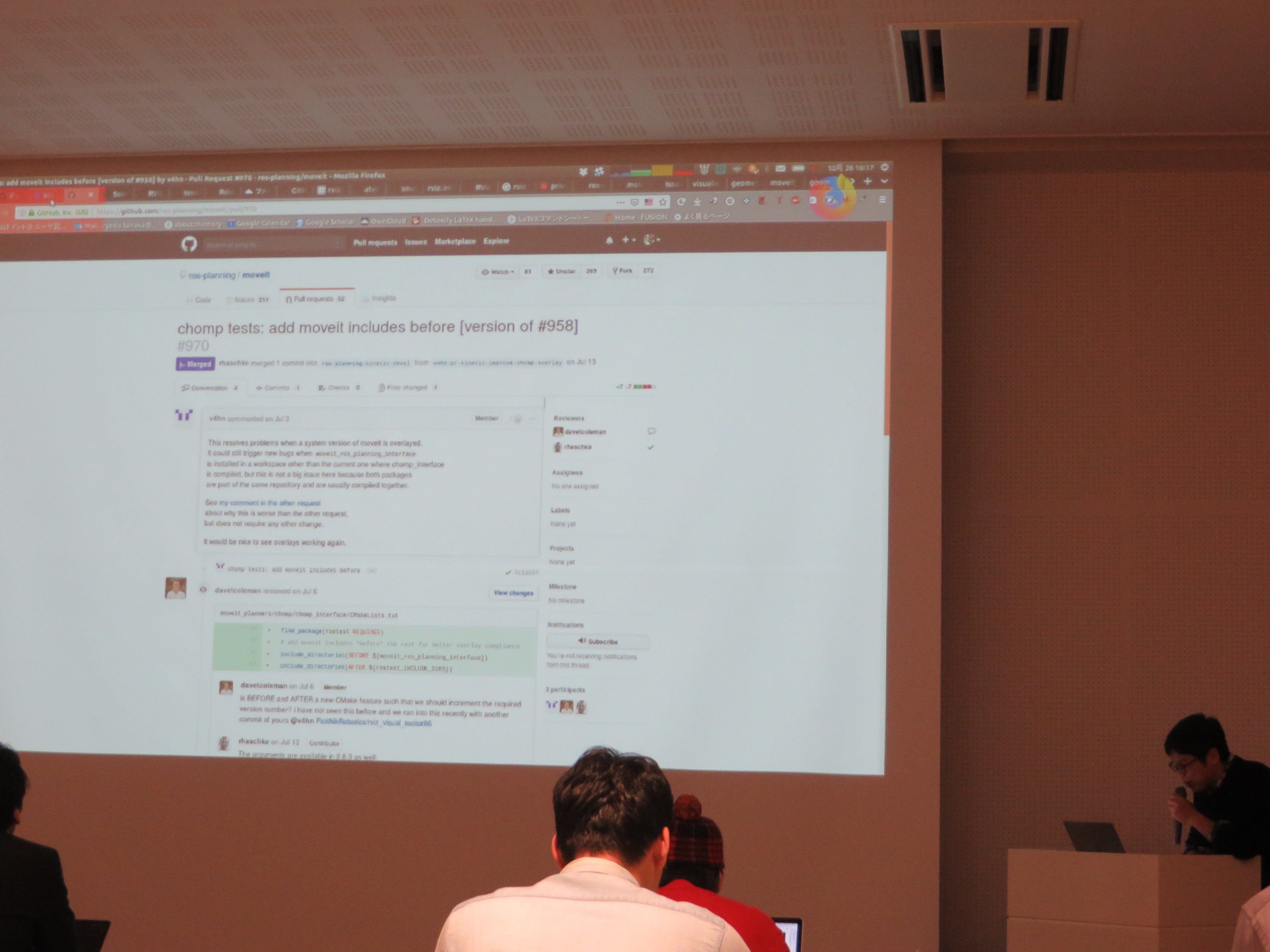
Issueへの取り組み(1)
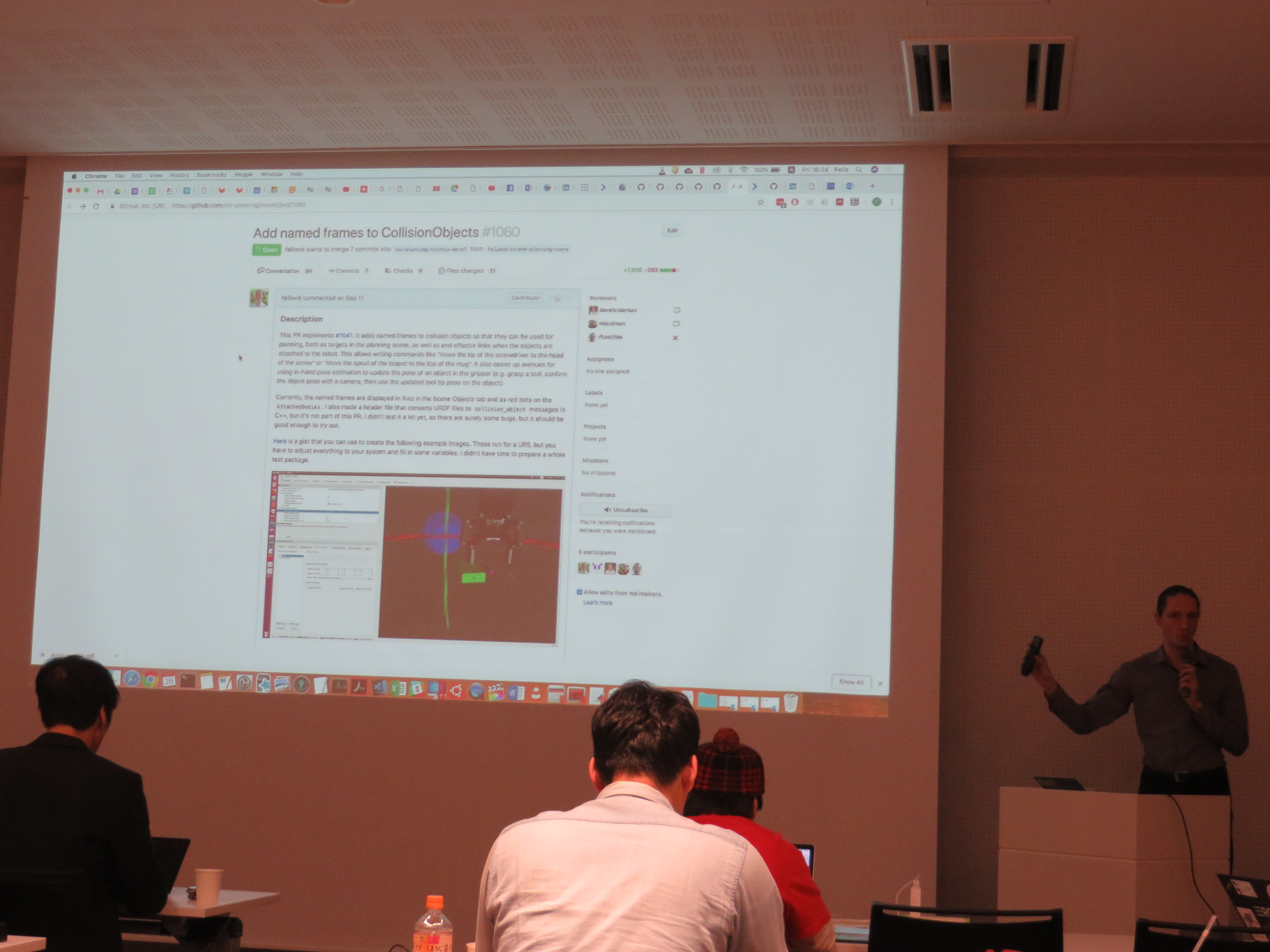
Issueへの取り組み(2)

JointTrajectoryPlotをgazebo上で使ってみる
次回参加時の参考になる取り組みがたくさんありますね!
記念写真です!
参加者の皆さま,ありがとうございました! 来年もお会いしましょう!
東風上奏絵 contributor
コメントを投稿するにはログインしてください。
著者について