-
-
- オープンソースロボティクスに関わる様々な疑問,質問にお答えするために,チケット制のコンサルティングサービスをはじめました.これまで以上にお気軽に色々ご相談ください.
- チケット一枚当たり,半日から一日程度の調査/相談を想定しています.
- 質問を頂いてから2営業日以内に初回回答し,4営業日時間以内の解決をめざします
- 一回の質問の例:
- どこから始めたらいいか,立ち上げを手伝って欲しい
- あることを実現したいがどのような方針がよいか教えて欲しい
- プログラムのコンパイルが通らないので直して欲しい
- ロボットモデルのコンバート方法を教えて欲しい
- オープンソースロボティクスの受託開発も行っております
- 玉川大学様向け全方位台車 “SPUR” 制御用 ROS パッケージ
- トヨタ自動車様ハッカソン環境 Gazebo シミュレーションパッケージ

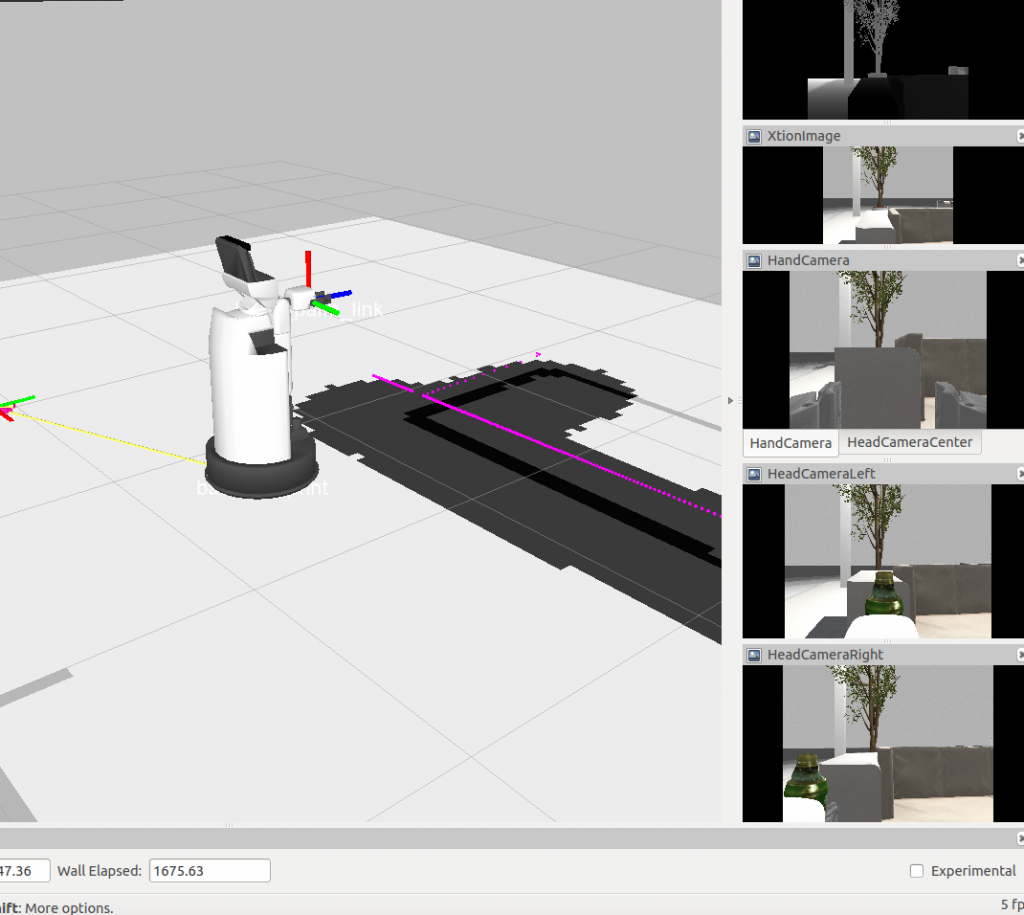
Toyota HSR Hackathon 2015- より. 左:Gazebo シミュレータ画面,右:同じシーンの RViz visualizer 画面.センサによる認識結果が表示されています
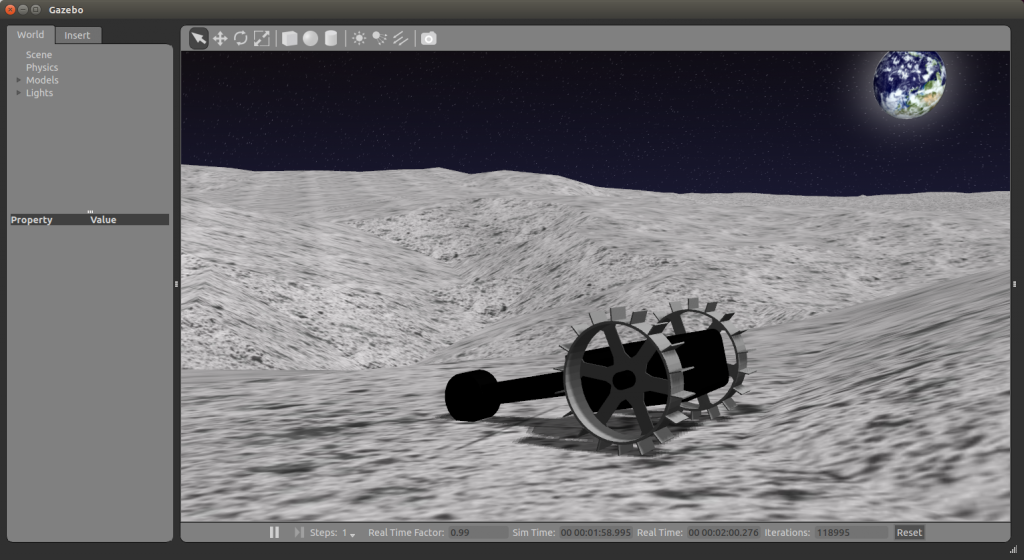
- Hakuto プロジェクト様 (Google Lunar-X 月面探査ロボット競技会) 向け Gazebo シミュレーション (WEB 版含む)

-
- 左: Linux desktop バージョン, 右:
- によるWEB ブラウザバージョン
-
- オープンソースロボティクスに関わる様々な疑問,質問にお答えするために,チケット制のコンサルティングサービスをはじめました.これまで以上にお気軽に色々ご相談ください.
-
お問い合わせ先:
一般社団法人 東京オープンソースロボティクス協会 (TORK)