# 動画:RSJ (日本ロボット学会) 2015 学術講演会で開催した公開講座のシーン.
開催内容
- 主旨:米・Rethink Robotics 社が2012年に,安価・安全を売りとして中小企業の生産ライン向けに発表した協調作業用の双腕ロボット Baxter Research Robot (研究版) の概要と使い方を解説します.先端的なメカニズムとインターフェースを持つ Baxter ロボットの特徴に加え,近年研究開発分野でユーザが広がってきているオープンソースのロボット用ソフトウェア ROS を使った,動作計画や視覚による認識のプログラム例も体験いただきます.
- 名称:ROS ワークショップ基礎編・産業用双腕 Baxter
- 主催:(社) 東京オープンソースロボティクス協会
- 協賛:日本バイナリー株式会社 (Baxter 日本正規代理店)
- 日時:ページ最下部の日程をご確認下さい.
- 場所:日本バイナリー株式会社様 セミナールーム (東京都港区芝).ただし変更あり
- 費用:25,000円 (税込み.学生さんにはオープンソース協力特別無料コース有り)
- 対象
- Baxter Robot の特徴について知りたい方
- Baxter Research Robotを用いたプログラミングに興味の有る方
- ROSの概要,並びにプログラミングに興味がある方
- カリキュラム
- 第一部 Baxter ロボット/ROS 概要の紹介
- Baxter ロボット紹介
- Baxter Research Robot
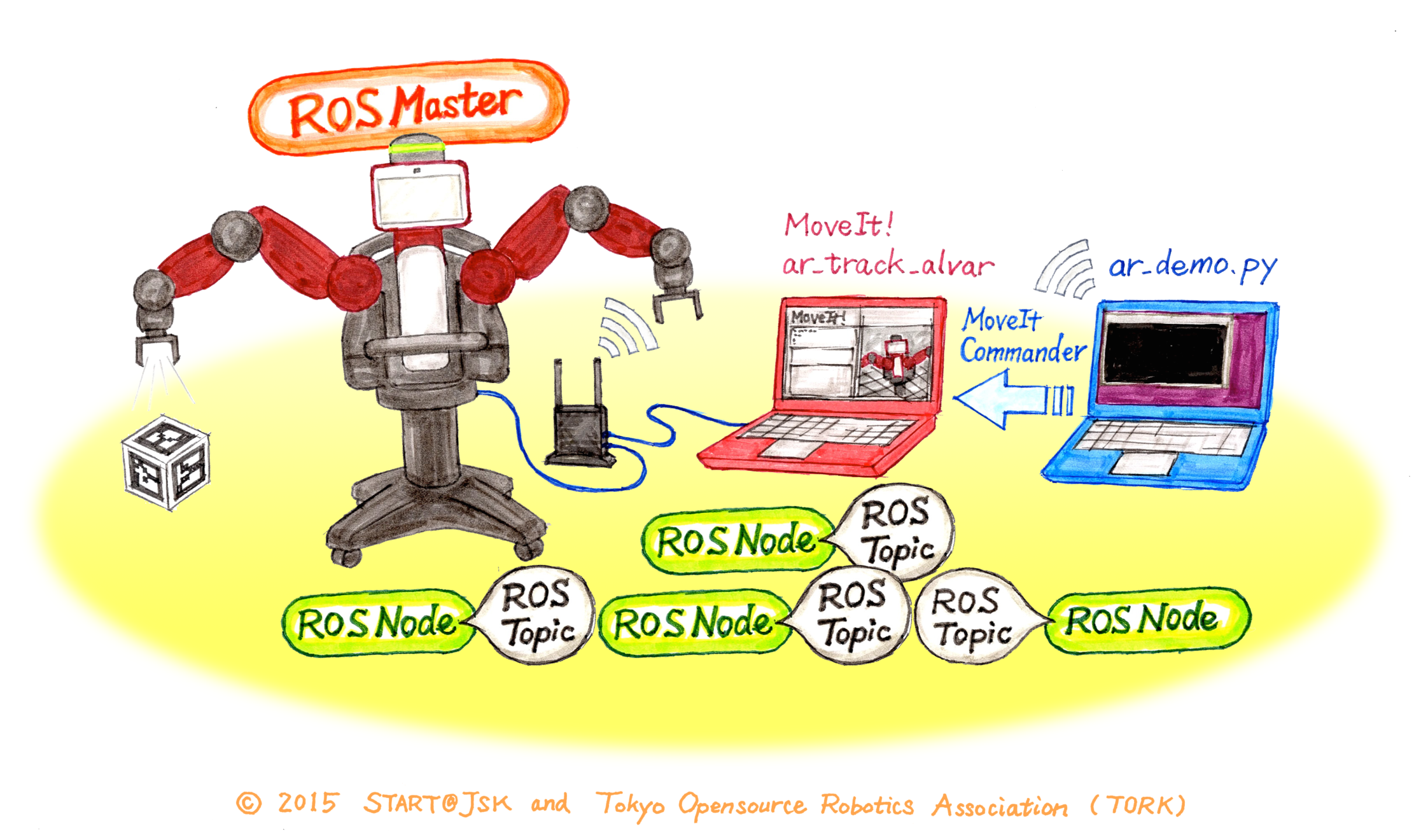
- ROS 概要 (歴史,ユーザ層,アーキテクチャ,基本コマンド,今後)
- 第二部 ロボットプログラミング・ハンズオン
- MoveIt! 動作計画プログラミング
- 視覚認識と行動生成プログラミング
- ミニハッカソン (Python スクリプト言語を利用.時間があれば)
- 第一部 Baxter ロボット/ROS 概要の紹介

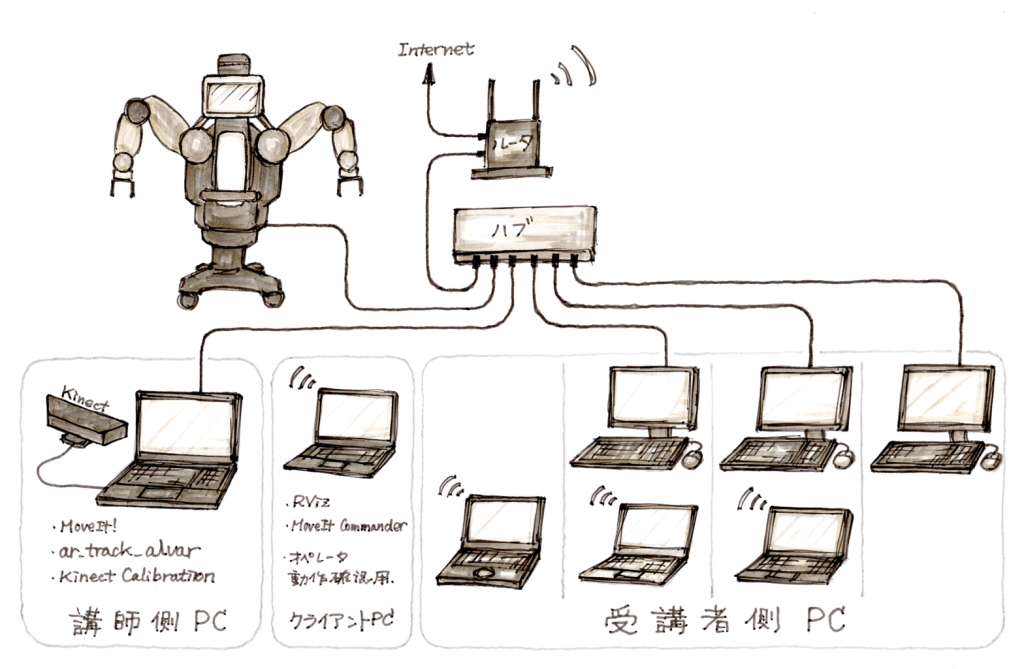
- 第二部では以下条件を満たすコンピュータをご持参いただくと,実際にプログラミングを体験していたくことが可能です.なおデスクトップコンピュータを限定数用意していますので,お申込み時にその旨ご連絡下さい.
- Intel i5 以上,4G以上のメモリ,7G以上の空ディクス容量,ネットワーク接続
- Proxy 等,社内/校内用の設定はトラブルの原因となります.ご来場前に解除した上でそれでもインターネットに接続できることを確認下さるようお願いします.
- VMWare 等,仮想マシンは ROS のツールが正常に動作しない事がありますので,お薦めしません.
- ハンズオン講習はUbuntu 14.04/ROS Indigo 環境で行います (Hydro 等ほかの ROS distro は対象外).
- ご持参いただくコンピュータが Windows, Mac 等,Ubuntu でない方にはハンズオン講習可能な LiveUSB を提供します.
- コンピュータご持参いただけない方には限定数こちらで用意がございます.申込みフォームで申告下さい.
- 同僚の方といらっしゃる場合等,ペアプログラミングはより良い習得の機会となるので,御推奨します.
- Intel i5 以上,4G以上のメモリ,7G以上の空ディクス容量,ネットワーク接続
- 学生の方は学生証
- [申込をキャンセルされる場合] 開催3営業日前以降,お客様の御都合による参加キャンセルはキャンセル料を頂戴します:3日前・2日前:30%,前日:50%,当日:100%
- [申込後にお振込みが確認できない場合] 開催4営業日前に入金未確認のご連絡を E-mail で差上げます.24時間以内に何らかの返信を頂けない場合,上述のキャンセルポリシーを適用させて頂くことがあります.
- [ワークショップ開催キャンセルについて] 事前参加申し込み者数が一定数に満たない場合,開催3営業日前18:00に開催可否を決定します.
- 既に申し込んで頂いている方には,キャンセルの場合は申込者様に E-mail でご連絡します.参加料金は,同種セミナー/ワークショップの次回開催日が決まっている場合,そちらへの振替えが可能です.振替希望されない場合,全額返金します.
その他
- 開催3日前以降のお客様の御都合による参加キャンセルご連絡を頂戴した場合,キャンセル料を頂戴します:3日前・2日前:30%,前日:50%,当日:100%
関連リソース
- なお当協会では,本ワークショップ受講されたお客様には続きとして,Baxter Research Robot の使いこなす上で欠かせない ROS に関するワークショップもご用意しております.このページから情報をごらんください.
- Baxter Research Robot の日本語コミュニティが開設されました.ros-sig-baxter-jp+subscribe@googlegroups.com へメイルを送るだけで,どなたでも無償購読できます.
開催日程
-
当ページ右上側のカレンダー・開催日程リストをご覧下さい.
お問合せ:info[a t]opensource-robotics.tokyo.jp