Let’s Bloom! – Releasing ROS packages
Do you build packages?
ROS is an open source project, but in
Where do the packages come from?
Regarding the creation and distribution mechanism of packages, the following ROS wiki explains.
It is built on this public build farm (Jenkins server).
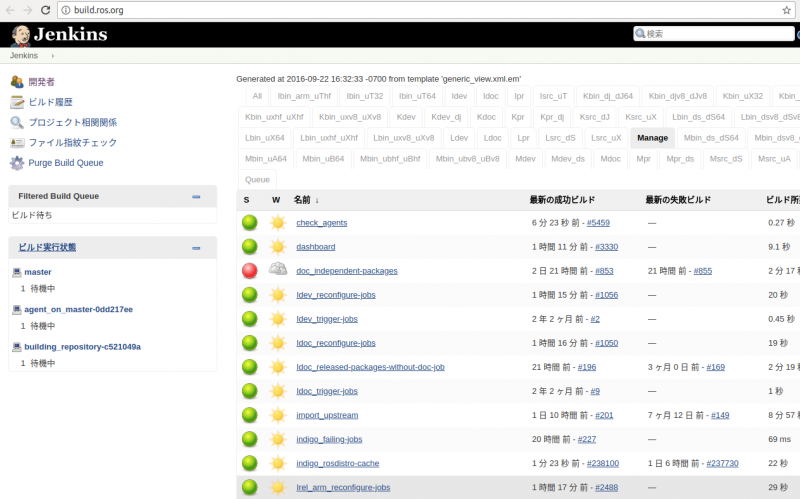
The screen of build.ros.org
A lot of packages will be built one by one as you are watching. For most packages, tests are also run at build time and we are sure that packages will (to a certain extent) work correctly. It will be rebuilt when new packages are released or version upgraded, as well as when dependent packages are updated. Because ROS packages are often dependent on other packages, builds may fail even when other packages are changed. If the build fails, it will be notified by e-mail to the package maintainer and will be resolved. Since the ROS system is very large, such a mechanism is indispensable for achieving consistency.
The built package is placed in the Shadow repository for a while, and it is used for checking the operation etc.
About once a month, it is copied from the Shadow repository to the public repository by an operation called Sync, and ordinary users can acquire it with apt. Sync’s notice will be posted regularly to ROS Discourse, so you may have seen it.
bloom – Tools for release
How can I put my package on this mechanism and have everyone use binary packages? Actually, it is surprisingly easy to do using a tool called bloom. For how to use bloom, please see the ROS wiki,
This time, I tried Japanese translation of bloom ‘s ROS Wiki which seems to be the minimum necessary. Please read it carefully and try to release and maintain packages. I hope that ROS package and ROS maintainers from Japan will increase, though currently it is very small…
If you have something you do not understand, let’s search and ask questions with ROS Answers. As a precaution, the ROS Discourse main body is a forum for discussion, so you should not post questions. However, the Japan User Group of ROS Discourse is supposed to post anything exceptionally, so it is okay to ask questions there. It is OK in Japanese.
TORK also accepts ROS package release and maintenance. If you are interested please contact info [at] opensource-robotics.tokyo.jp.
Ryosuke Tajima administrator
About the author