
ROSワークショップ中級・自律移動編を10月31日(火)に名古屋で開催します
来る10月31日(火)に,ROSワークショップ中級・自律移動編を名古屋にて開催します.ROSでの自律移動(ナビゲーション)を学びたい方は,これを機会にぜひ受講をご検討ください.
基本的にはROSワークショップ初級編を受講した方を対象としておりますが,それに準ずると思われるROSの経験がある方なら,受講いただけます.お申込みは詳細をご確認の上,ページ内のお申込みフォームよりエントリをお願い致します.
- 日時:10月31日(火)13:30~17:30 ROSワークショップ中級・自律移動編
- 場所:COffice名古屋伏見(市営地下鉄 伏見駅 徒歩1分)

シミュレーション環境での自律移動
ワークショップでは,まずシミュレータを動かしながら自律移動の概要を学ぶハンズオンを行います.次に,掃除ロボットRoomba(ルンバ)とラズベリーパイ(Raspberry Pi),低価格なレーザセンサRPLIDARで構成された自律移動ロボット”Roomblock”を用いて,実機の操作,地図の生成,自己位置推定といった自律移動の機能とプログラミング方法を学びます.最後に,ROSの自律移動の構成とその要素について,より詳しく解説していきます.シミュレータと実機を用いた実践的なワークショップとなっています.
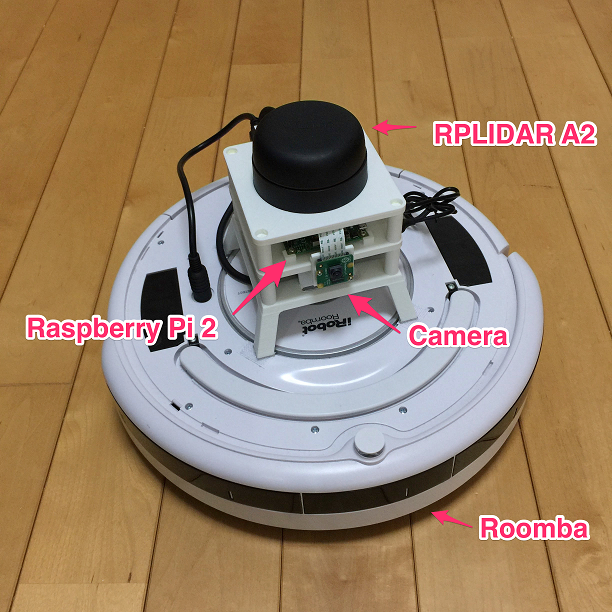
自律移動ロボットRoomblock
上記以外での日程の調整,その他ご相談,開発委託,出張ワークショップ,カスタマイズワークショップも承っております.
お気軽にご相談ください.
info[at]opensource-robotics.tokyo.jp
Ryosuke Tajima administrator
著者について