対決!低価格LIDAR(2) 仕様編
製品仕様
前回は低価格LIDARを紹介しました.
今回は,双方の仕様を見ながら比較してみましょう.
大事な注意です!
- 実際に使う場合には,必ずご自分で仕様を確認してください!
- この記事に誤りがあったせいであなたのプロジェクトが上手くいかなくても,TORKは責任はとれません!
原理
産業用LIDARはToF(Time of Flight)方式による距離の計測が多く使われています.これは,レーザ光が対象物に反射してセンサに返ってくるまでの時間を計測して,距離を計算する方式です.SweepはToF方式による距離計測を行っています.対して,RPLIDAR A2はToFではなく,三角測量の原理を使っています.これは,発光点,反射点,受光点が三角形を構成するようにしてあって,受光点の変位をセンサで測定することで,反射点までの距離を測る方式(分かりますよね?)です.
一般的には三角測量の方が簡単そうですが,反射点までの距離が大きくなると,たとえ反射光を計測できたとしても距離の分解能は落ちていきます.一方ToFは,反射点までの距離が大きくなっても(反射光を計測出来る限り)分解能が落ちないので,最大計測距離を大きくできます.
もうひとつ大きな違いがあります.RPLIDAR A2は,サンプリングが角度に同期して行われています.つまり,計測が行われるレーザの角度は,回転ごとに(微妙なズレはあるにしても)同じです.一方Sweepは,角度が0の位置にスキャン開始は同期しているものの,各距離計測は角度には同期していません.Sweepの仕様はセンサから得られるデータが角度と距離のセットになっています.Sweepが発光するレーザは単発のパルスではなくパターンをもたせていて,そのためにサンプルレートが一定ではない(デフォルトで500~600Hzと幅がある)ので,このようになっていると思われます.
URGやSICKといったハイエンドの2次元LIDARは,角度に同期した距離が取得できる方式ですので,Sweepの方式はちょっと使いにくい気がします.
角度分解能,計測周期,サンプルレート
LIDARで重要な性能として,角度分解能と計測周期があります.角度分解能は計測点の角度の細かさで,分解能が低いと対象物や環境の計測点が少なすぎて,計測したものの形がよく分からなってしまいます.計測周期は1スキャン(1回転)にかかる時間で,計測周期が大きいと,動くものを計測したり,ロボット自身が動いたりしたときに,正確な計測が難しくなります.
2つのセンサはどちらも,光源と計測部分が一体化した部分を回転させて,周囲の計測を行っています.RPLIDAR A2は5Hzから15Hzまで回転速度が可変なのですが,回転速度によらず計測点の数は同じ(400点)です.
Sweepは,1Hzから10Hzまで回転速度が可変ですが,サンプルレートが最大1000サンプル/秒(正確には1000~1025と幅がある)ので,回転速度が早いほど1回転あたりの計測点の点数は少なくなっていきます.
- RPLIDAR A2 : 400サンプル/回転
- Sweep : 1000サンプル/秒
もし両方とも,10Hzで回転している場合には,
- RPLIDAR a2 : 400サンプル/回転
- Sweep : 100サンプル/回転
となるので,RPLIDAR A2のほうが角度分解能が4倍高いことになります.Sweepで同じ分解能を得たい場合には,周期を1/4(2.5Hz)で回転させる必要があります.
最大計測距離と距離分解能
最大計測距離も重要な性能です.もちろん遠くまで計測できるに越したことはないですが,たとえば経験上,オフィスのナビゲーションであれば10mもあれば充分ですし,自動運転のような用途であれば100mでも足りないでしょう.
RPLIDAR A2は,ややこしいことに,機種によって計測距離が違います.購入の際には,型番に注意が必要です.今回使ったのは計測距離が最大8mのRPLIDAR A2M8です.
- RPLIDAR A2M4 最大計測距離 6m
- RPLIDAR A2M8 最大計測距離 8 m
- RPLIDAR A2M6 最大計測距離16 m
一方Sweepは,最大計測距離が40mとなっています.
ちなみに,近い側の限界である最小計測距離は,両方とも同じくらいです.
- RPLIDAR A2M8 最小計測距離 0.15 m
- Sweep 最小計測距離 0.15 m
距離分解能はどうでしょうか.RPLIDAR A2M8の距離分解能は,
- 1.5m以下の場合 0.5mm以下
- それ以上の距離では距離の1%以下
とあり,近い方が分解能が高くなっています.近いと物体の形状がちゃんととれる感じです.かわりに,距離が遠くなると,分解能,精度ともに落ちていくことが予想できます(仕様書には誤差についてはデータがありませんでした).
一方,Sweepの方は,計測距離にかかわらず,
- Sweep 距離分解能 1cm
となっています.Sweepの仕様書には距離の計測誤差のグラフも掲載されていますが,計測距離が長くなっても,誤差が増えていないことが分かります.ToF方式の特徴と言えます.
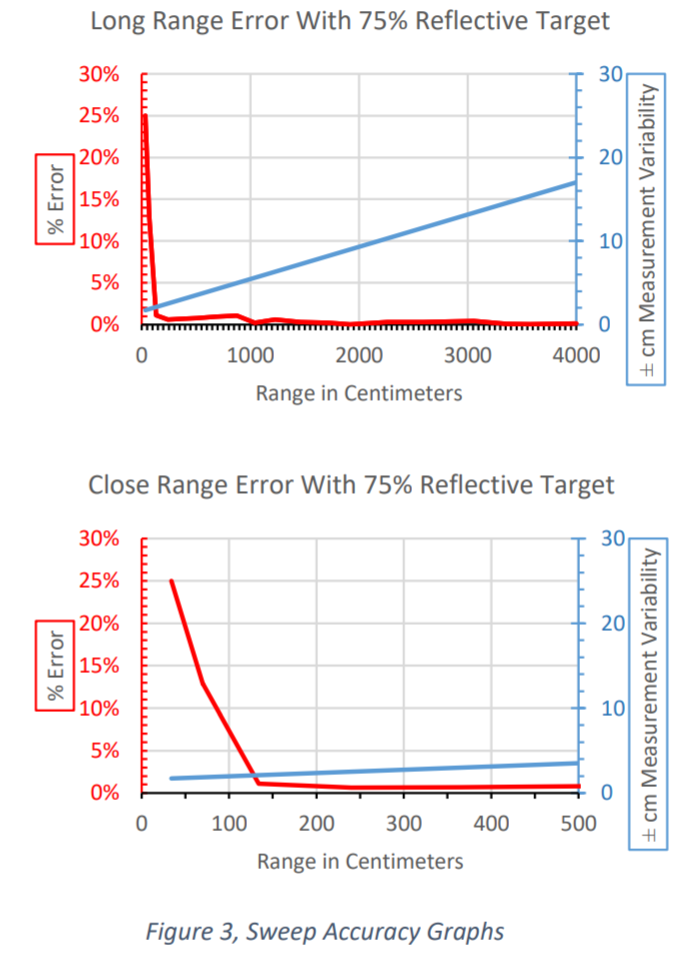
Sweepの計測誤差 (Sweepマニュアルより抜粋)
外形その他
どちらもかなり小型ですが,上部の部品が回転するので,触ったりしないようにする設置が必要です.
- RPLIDARa2 : 直径 70mm
- Sweep: 直径 65 mm
Sweepの方は,ケーブルコネクタが横と下の2つの向きになっていて,配線がしやすい感じです.RPLIDARはケーブルが直出しなのでケーブル長を短くするのがちょとやりにくそうです.

Sweepの裏側のコネクタ
どちらも,USBで接続された場合には,USBバスパワーで動作します.また,マイコンなどのUARTで通信することができますが,その場合には別途電源が必要です.
まとめ
外形が同じように見える2つのセンサですが,実は設計思想が少し違うことが分かります.RPLIDAR A2は近距離,屋内用で,Sweepは遠距離,屋外用の仕様であると言えます.ちょっとSweepの角度分解能が低いのが気になります.
Ryosuke Tajima administrator
著者について