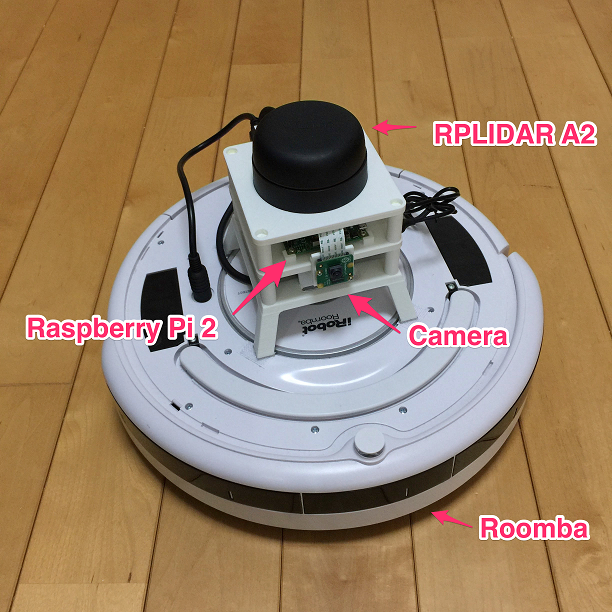
ルンバとラズベリーパイとレーザ距離センサによる自律移動ロボット Roomblock(1)
弊社のROS中級ワークショップ・自律移動編では,ルンバをベースとした自律移動ロボット”Roomblock”を教材として使用しています.不定期なエントリとして,このRoomblockの内容を紹介していきます.
まず,Roomblockは車輪移動台車として,iRobot社のお掃除ロボット,ルンバ(Roomba)を使用しています.驚かれる方もいるかもしれませんが,ルンバは実は通信用のシリアルポートを持っていて,パソコン等から操作したりセンサ情報を取得することが可能なのです.ルンバのこの機能は,発売当初から一部のエンジニアやホビイストの間で話題になり,ルンバを操作して楽しむ”Roomba Hacking”がブームとなったほどです.ROSが登場するよりもずっと前の話です.

もう壊れてしまいましたが,2007年に私が初めて購入したRoombaです
iRobot社からは,”iRobot Create”という,掃除機能を省いた教育向けのルンバが発売されていたこともありました.ROSでも初期のTurtlebotプラットフォームは,このCreateをベースにしていました.現在はiRobot Createの販売は終了しており,TurtlebotもKobukiを用いたTurtlebot2, そしてRobotis社による独自プラットフォームTurtlebot3へと進化しています.
そんな中,なぜ今お掃除ロボット,ルンバを教材のベースとしたのでしょうか?3つ理由があります.
1つめは,ロボットの全体の価格をできるだけ抑えるためです.発売当初は割高に感じたルンバも,普及が進み今では3万円台から手に入るようになっています.屋内での自律移動に適したサイズ,車輪,センサなどを備えたロボットとしては破格です.
2つめは,ROSのパッケージがすでに存在していることです.それらを利用して,自律移動技術の本来的な目的である,地図生成や経路計画のソフトウェアの学習をすぐに始めることができます.
3つめは,ルンバが掃除をしてくれるからです…当たり前ですね.しかし,余暇にロボティクスを勉強したいエンジニアが,家族に「自律移動ができる10万円のロボットを買いたい」と言って納得してもらえるでしょうか?「ルンバなら掃除もしてくれるよ!」というとみんな喜んでくれます.

最近では「ルンバ対応」のリビングチェアなるものまであります
おっと,つい話が長くなってしまいました.私ルンバが大好きなもので….今回はここまでです.
Roomblockの詳細な作り方については,Instructablesで公開しています.ただし当社は,これらの内容によって生じるいかなる損害についても責任を負いません.興味がわいた方はあくまで自己責任で,チャレンジしてくださいね.
Ryosuke Tajima administrator
著者について