
Roomblock: ループを含む大きな建物での地図生成
名城大学構内で実験させていただいたデータから,ROSの地図生成パッケージで地図を生成してみました.データはROSのbagファイルとして取得したので,同じデータに対して異なる地図生成パッケージを適用することが可能です.
ROSの地図生成のパッケージとして,
- gmapping
- slam_karto
- hector_slam
- Google cartographer
の4つのパッケージを用います.
これまで家屋や廊下など,比較的狭い環境で地図を作ってきました.それらの環境ではどの地図生成パッケージも,(誤差はともかくとして),自律移動に使えないような大きく矛盾する地図を作成することはありませんでした.狭い部屋では,基本的にレーザセンサのデータをずっとつなぎ合わせ続けることで,部屋の地図を作ることが可能です.
しかし,今回のデータは非常に大きな建物の長方形の廊下を一周したものです.廊下を一周回って元の場所に戻ってきた時,それが元の場所であることを認識せず,そのままレーザセンサのデータをつなぎ合わせていくと,最初に作った地図と矛盾したものを上書きし続けてしまいます.これを避けるためには,現在居る場所が以前来たことのある場所であると認識した上で,地図全体を辻褄があうように生成しなければなりません.これは”loop closure”と呼ばれ,地図生成では非常に難しい問題です.
以下の動画は,4つのパッケージで地図を生成した結果をまとめたものです.地図のグリッドサイズは5cmとし,各パッケージのパラメータのほとんどはパッケージの規定値のままで,一部のパラメータのみ少し調整しました.
gmappingは非常に健闘しました.途中の廊下は真っ直ぐになっておらず,地図の形は後半にかけて不正確になっています.これはルンバのあまり正確でないオドメトリを少し信頼しすぎているようです.しかし,一周回ってきた最後に注目してください.以前来たことのある場所だと認識し,辻褄があうように地図全体を変形させました.矛盾のない,ほぼ正しい地図が出来上がりました.
slam_kartoは,今回はloop closureの検出に失敗してしまいました.一周回ってきた後,最初に作った地図を破壊しながら,新しい地図を上書きしていきます.矛盾した地図となってしまいました.
hector_mappingには,じつはloop closureの機能がありません.また,車輪の回転速度(オドメトリ)を使っていません.そのため,この環境ではうまく地図を作ることはできませんでした.
Google cartographerは最後発で,しかもこのような大規模環境の地図を作るために開発されたアルゴリズムです.やはりループを正しく閉じることに成功しました.
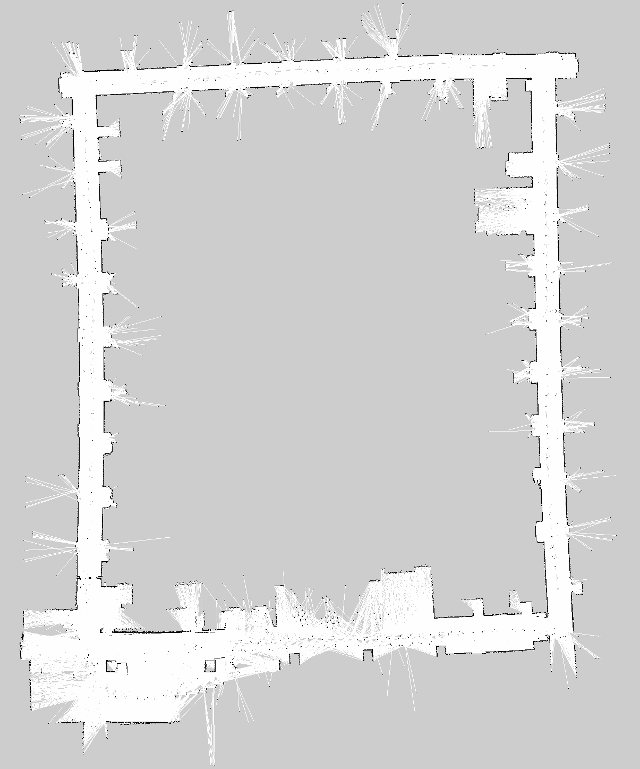
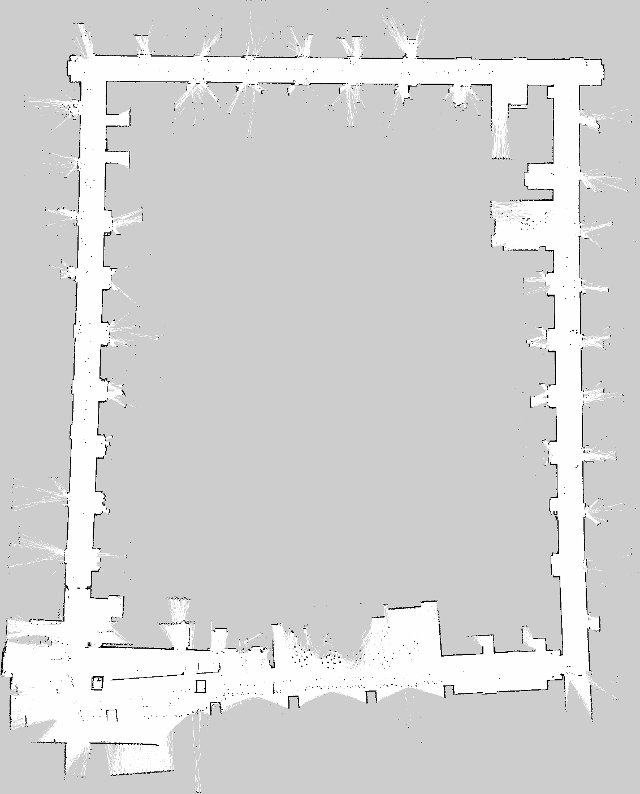
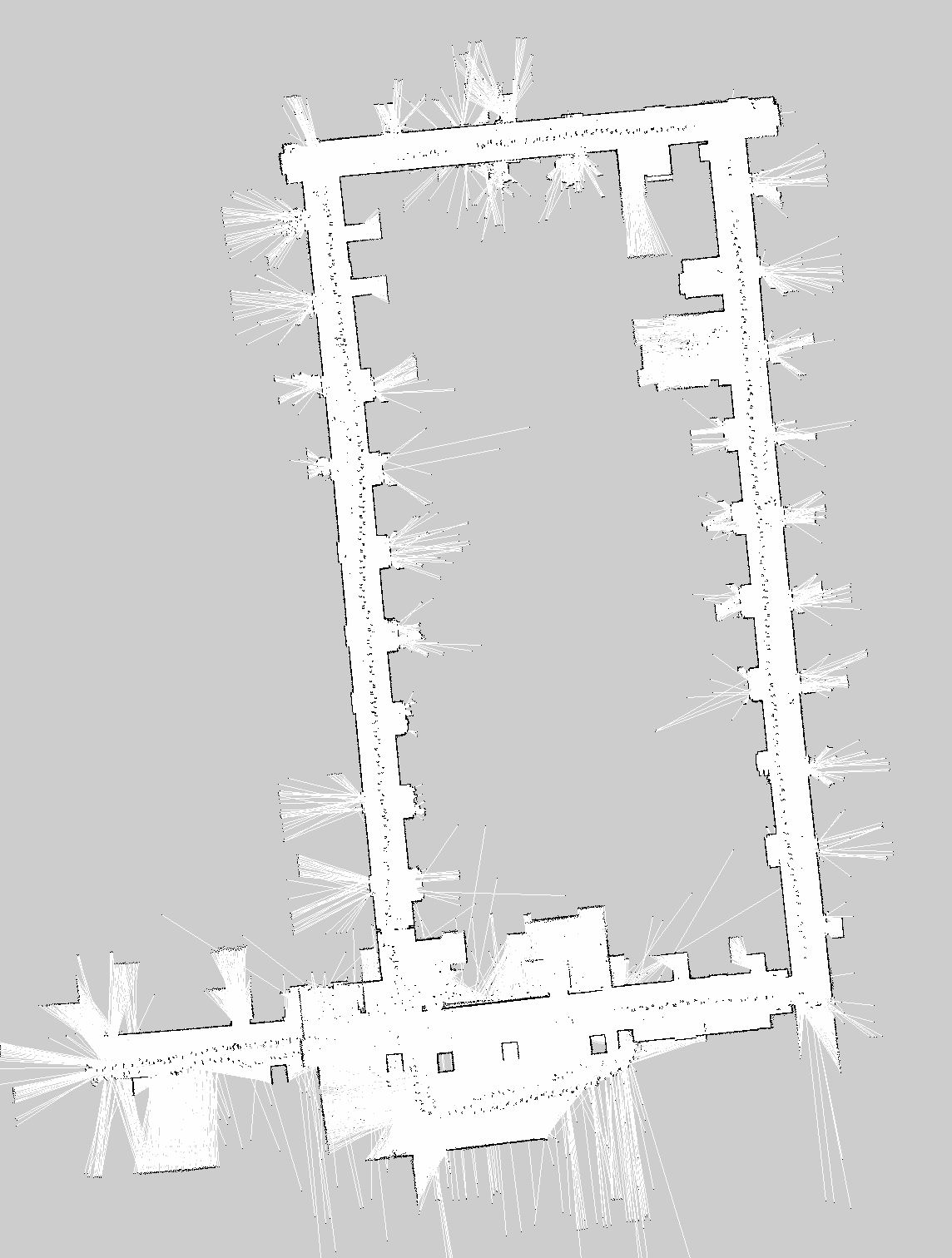
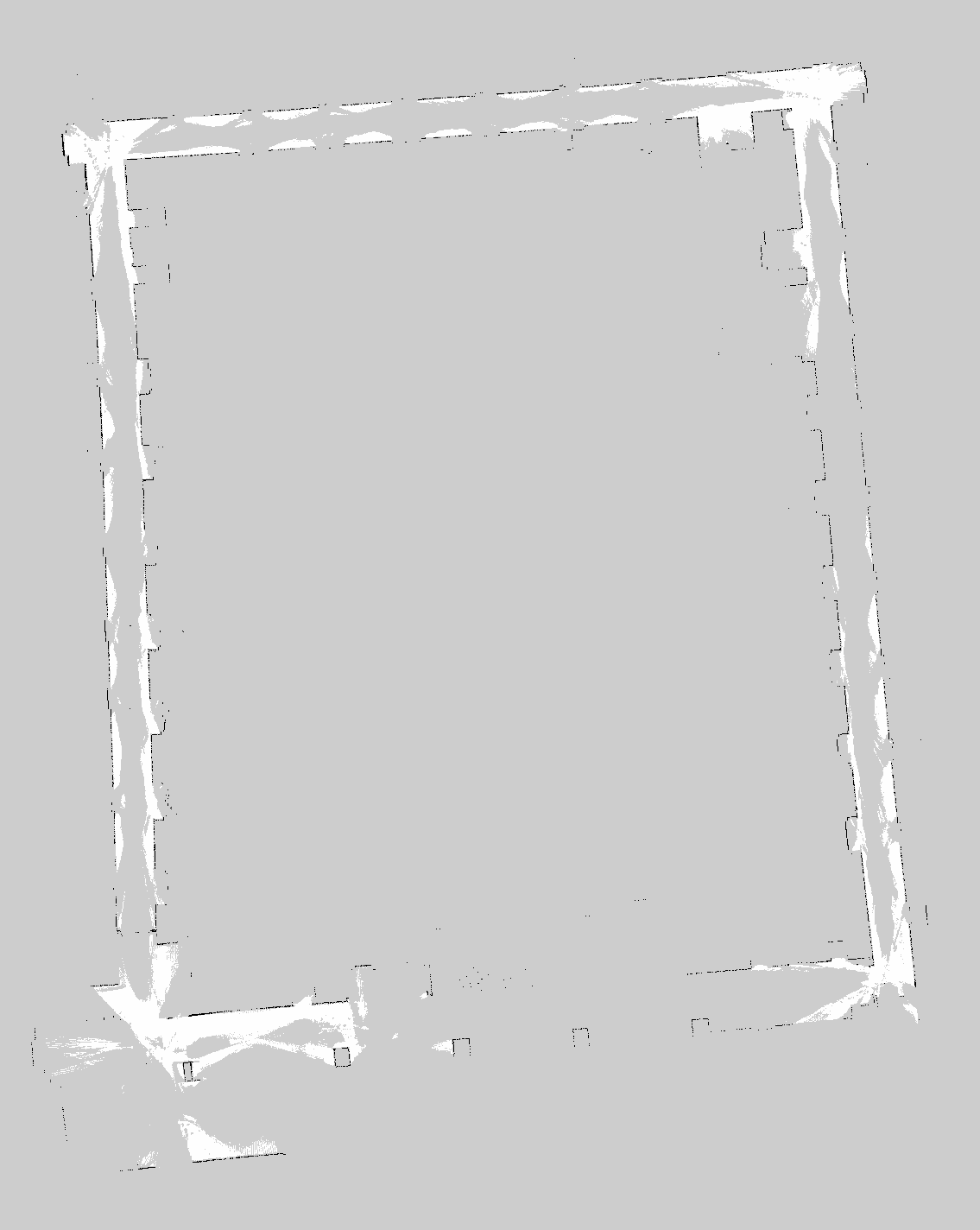
最終的に生成された地図(左から,gmapping, slam_karto, hector_slam, cartographer)
以上の結果は,どのパッケージやアルゴリズムが優れているか,どのパッケージを選ぶべきかということを示すものではないことに注意してください.今回,パラメータはほとんどチューニングしなかったので,それぞれのパッケージの最高の性能が出ているわけではありません.また,それぞれのアルゴリズムには得意不得意があるので,課題に対してどれが良いかは,実際に試してみないと分からないことが多いはずです.
現在のところROSはこのような様々な地図生成パッケージを比較検討できる唯一のプラットフォームです.オープンソースの利点を活かし,ぜひご自分の手で確かめてみることをお勧めします.
TORKでは,自律移動編を含むROS初級,中級のワークショップ,企業や大学でのプライベートワークショップのご依頼も承っております.お気軽にお問合せください!
info[at]opensource-robotics.tokyo.jp
Ryosuke Tajima administrator
著者について