対決!低価格LIDAR(4) 屋内実験編
前回はROS対応を比較してみました.今回は実データでの比較を紹介します.
データ比較(屋内)
自宅のリビングルームにて計測を行った結果の動画を以下に示します.ロボットでの使用を考えて,センシングの高さは15㎝としました.センサのまわりを一周歩きまわっています.
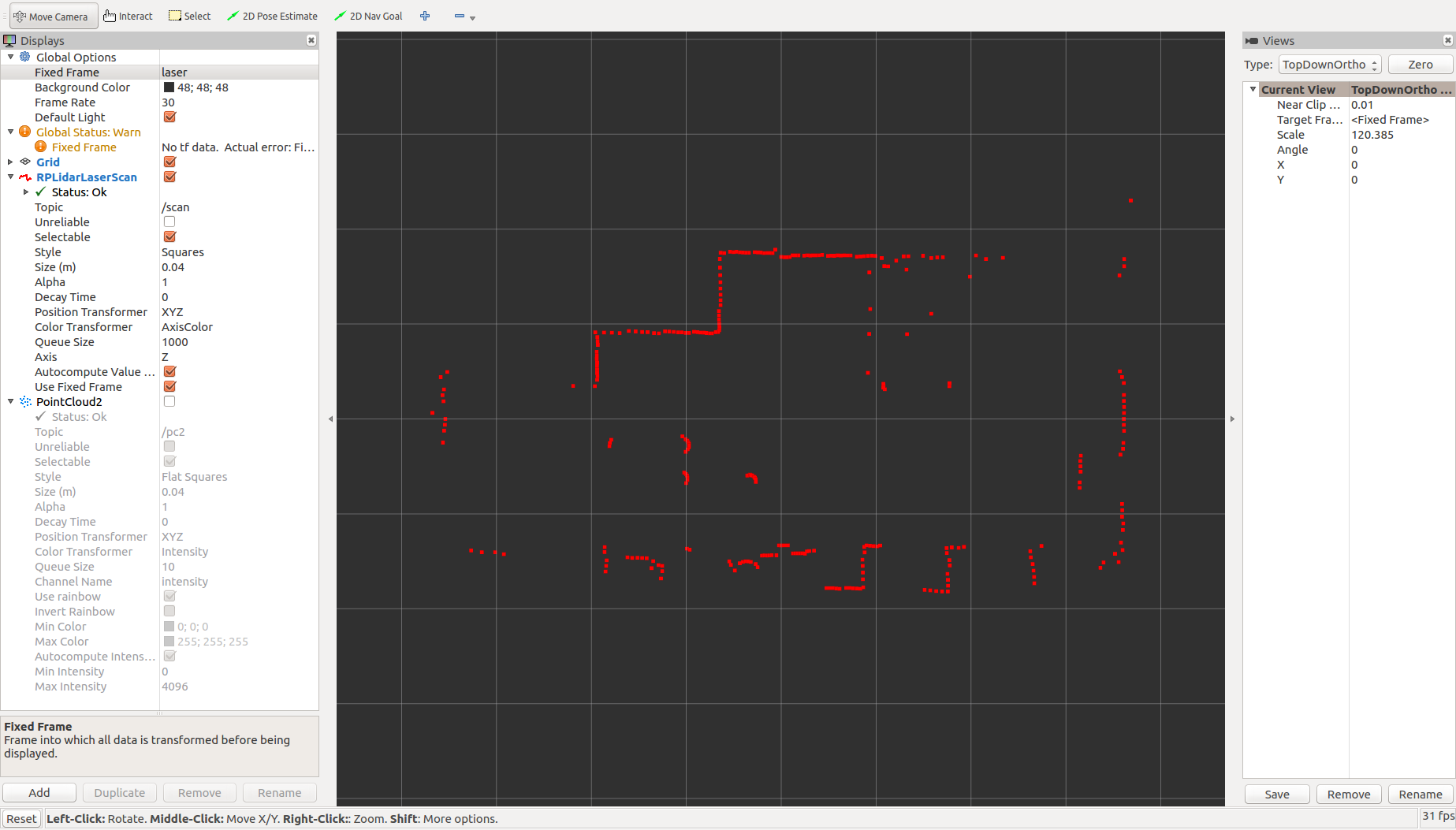
RPLIDAR A2 (10Hz)
部屋の形がきれいに写っていて,周りを歩く足もちゃんと半円状に見えています.
Sweep (10Hz)
部屋の形はなんとなく分かります.足も写っていますが,形状までは分からないです.
Sweep (3Hz)
RPLIDAR A2とほぼ同じ解像度の点群になり,部屋の形が分かります.足の形状はぼんやりしていて,更新が遅いので分かりにくいです.
屋内まとめ
屋内で使うのであれば,角度分解能と距離の計測精度の点で,RPLIDAR A2が良さそうですね.これまでの使用でも,通常のリビングやオフィスのような屋内のSLAMで,RPLIDAR A2は全く問題なく機能しました.
次回は,屋外での計測結果を見てみます.
Ryosuke Tajima administrator
著者について