Gazebo/MoveIt のための 3D モデリング(10)部品作成編
前回は「Gazebo/MoveIt のための 3D モデリング(9)滑らかなサーフェス – 作成編(その4)」として,制御点の大幅な位置調整も含めた NURBS サーフェスの調整や制御点移動による曲面サーフェス作成例を紹介しました.前回の記事も含め,複数回に分けてサーフェスの作成方法に主眼を置いたモデリングの紹介をしてきました.
今回の記事は洗濯機の扉などの各部品の作成例を紹介して最後に洗濯機のモデル形状を完成させます.
洗濯槽扉とその周辺部品
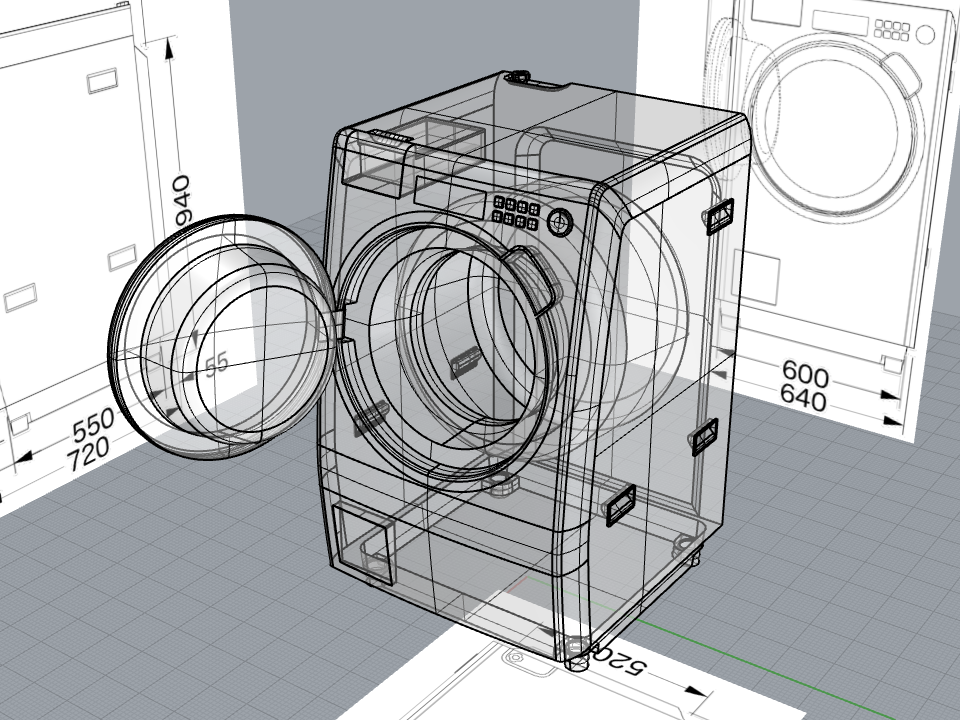
 洗濯機前面が球面サーフェスなので,円形の扉の中心軸をその球の中心から作ると洗濯槽扉と洗濯機前面共に軸対称となり幾何学的に収まりが良くなります.
洗濯機前面が球面サーフェスなので,円形の扉の中心軸をその球の中心から作ると洗濯槽扉と洗濯機前面共に軸対称となり幾何学的に収まりが良くなります.
側面図から判断し,球の中心から水平よりも 8° 上方に角度を持つ直線が扉の中心軸であると推定しました.
(以後,各図ともクリックで拡大します.)
 洗濯槽扉は中心軸周りの「回転(Revolve)」で作成できますので,そのプロファイル曲線作成にあたりそれに適した「作業平面」を設定すると描画しやすいと思います.
洗濯槽扉は中心軸周りの「回転(Revolve)」で作成できますので,そのプロファイル曲線作成にあたりそれに適した「作業平面」を設定すると描画しやすいと思います.
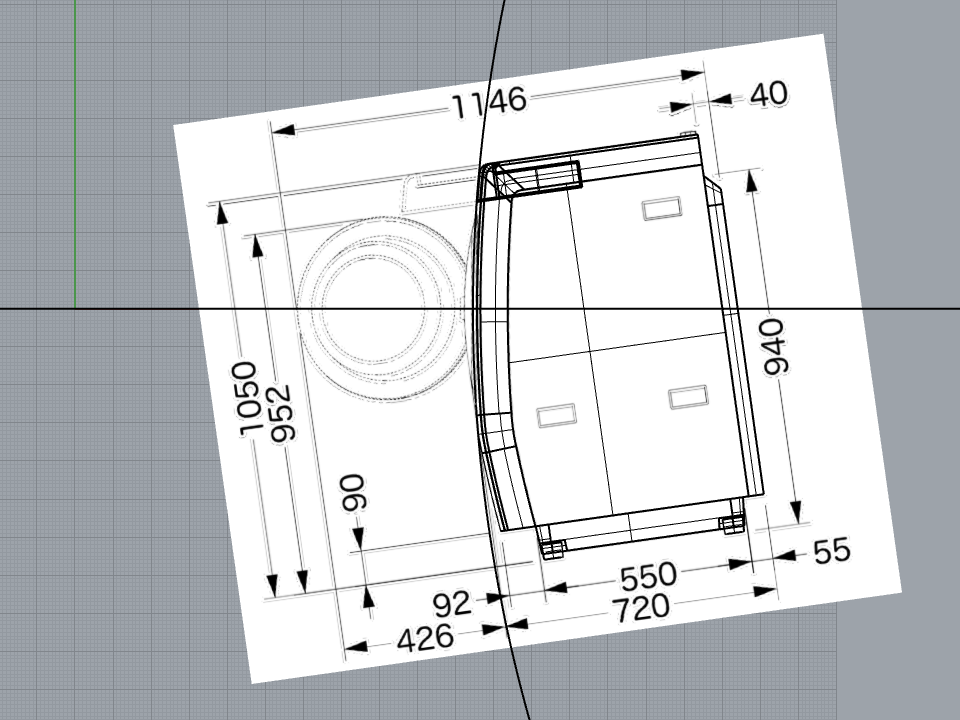
洗濯槽扉の軸上の 2点 とワールド座標系での XZ平面内 の点の「3点指定」で「作業平面の設定」を行ってから,ビューを「作業平面の平行ビュー」を設定すると見やすいです.
- 作業平面の設定(3点指定)
- メニュー: ビュー(V) > 作業平面の設定(P) > 3点指定(3)
- コマンド: CPlane > 3点(P)
- 作業平面の平行ビュー
- メニュー: ビュー(V) > ビューの設定(V) > 作業平面の平行ビュー(P)
- コマンド: Plan
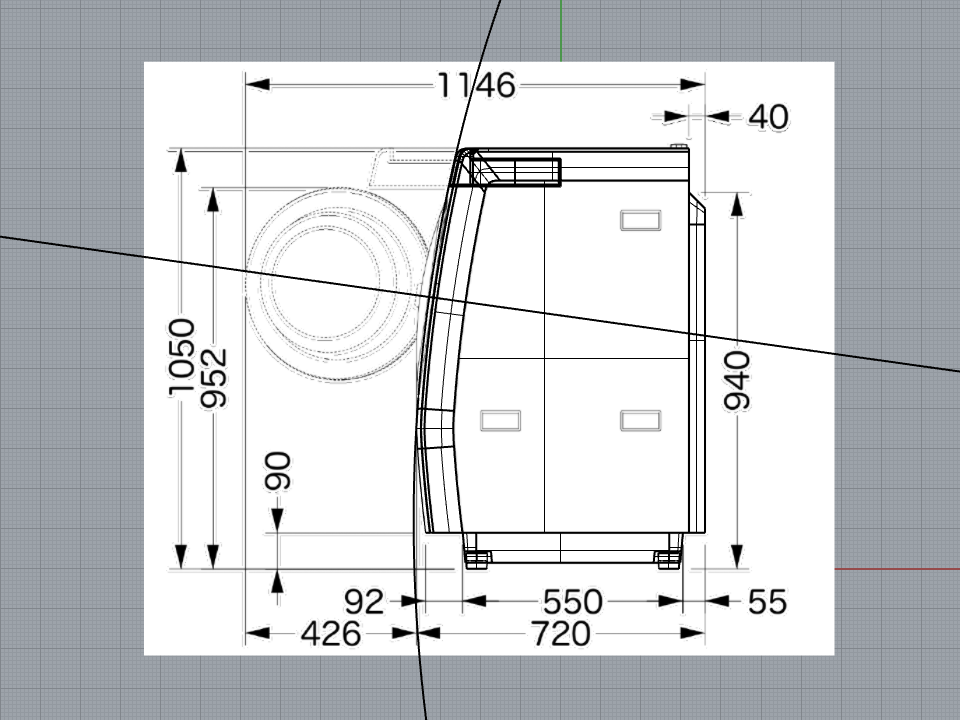
 洗濯槽扉の奥行方向の大きさや形状は上面図に開いた状態の扉が描画されているので少し斜めから見た投影図になってしまいますがそこから推測します.
洗濯槽扉の奥行方向の大きさや形状は上面図に開いた状態の扉が描画されているので少し斜めから見た投影図になってしまいますがそこから推測します.
そのために既に 3D 空間上に配置されている上面図をコピーし,位置と方向を調整して,右の図の様に作業平面上で直接的に参考にできるように配置します.
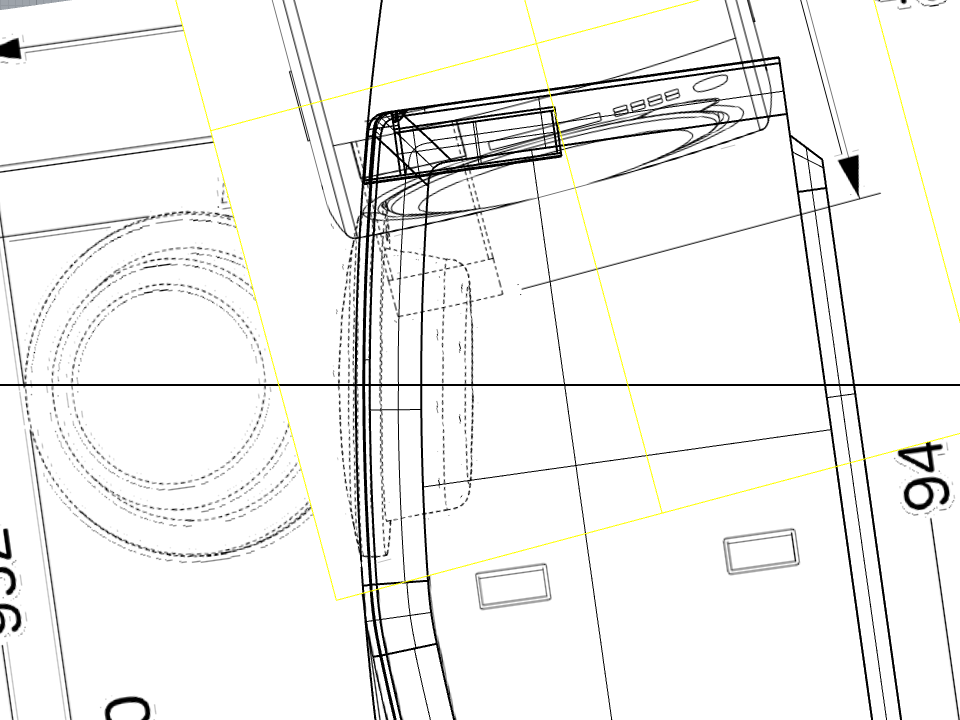
 洗濯槽扉の形状プロファイルを描画して「回転(Revolve)」などで作成します.
洗濯槽扉の形状プロファイルを描画して「回転(Revolve)」などで作成します.
また洗濯機本体側の洗濯槽扉の収まる部分や洗濯槽については三面図などからは寸法は拾えないので推測で大体の形状で作成します.
 洗濯槽扉が開く方向は三面図から洗濯槽扉の中心軸を通りワールド座標系の Y軸 に平行な平面内で回転して開いているようです.
洗濯槽扉が開く方向は三面図から洗濯槽扉の中心軸を通りワールド座標系の Y軸 に平行な平面内で回転して開いているようです.
この平面内で開いた状態の位置に洗濯槽扉をコピー移動・回転させることにより回転中心を幾何学的に算出することができます.
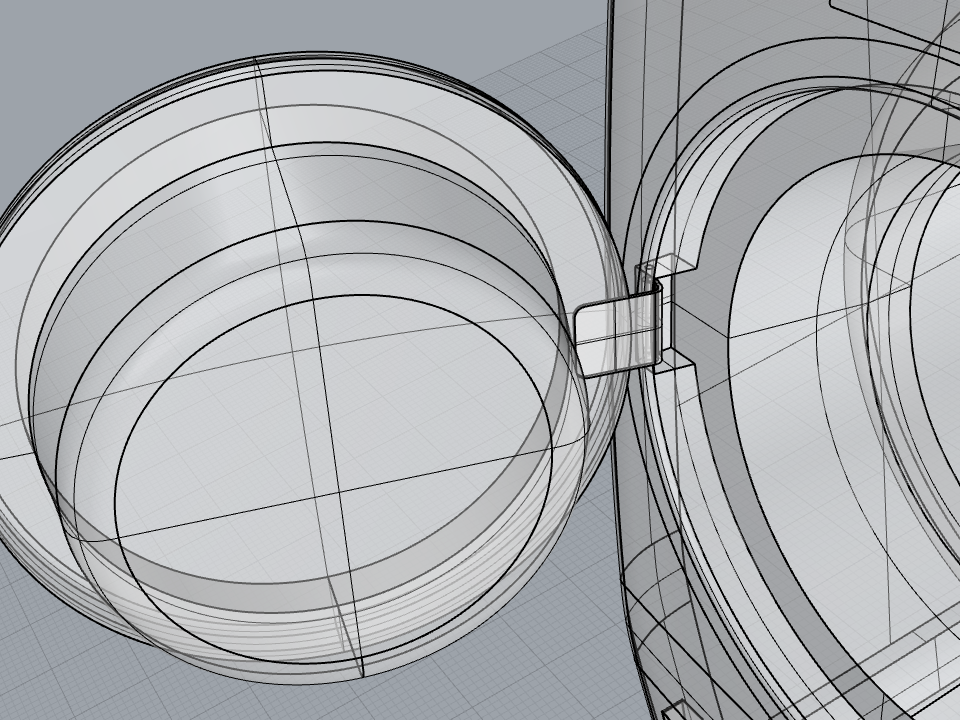 回転軸が算出できたら洗濯機本体に干渉しないヒンジのモデルを作成します.
回転軸が算出できたら洗濯機本体に干渉しないヒンジのモデルを作成します.
 洗濯槽扉を開くボタンは洗濯槽扉に正対する作業平面上で形状を描画してサーフェスにしてゆくと作業がしやすいです.
洗濯槽扉を開くボタンは洗濯槽扉に正対する作業平面上で形状を描画してサーフェスにしてゆくと作業がしやすいです.
洗濯機上面給水部
 カタログのレンダリング図を見ると給水口が洗濯機本体への接続部は段落ち形状になっています.
カタログのレンダリング図を見ると給水口が洗濯機本体への接続部は段落ち形状になっています.
 段落ち部の平面形状は上面図から,また給水口の大体の形状は三面図から拾えます.
段落ち部の平面形状は上面図から,また給水口の大体の形状は三面図から拾えます.
段落ちしている寸法は三面図からは拾えませんがシミュレーション上も問題になる部分ではないので推測で適当に 10mm としました.
洗濯機前面下部フタ
 洗濯機前面下部のフィルターが入っているところのフタは雰囲気を出すだけで溝を設ける形にしました.
洗濯機前面下部のフィルターが入っているところのフタは雰囲気を出すだけで溝を設ける形にしました.
洗濯機両側面の取っ手
 洗濯機両側面の移設用の取っ手は側面図と正面図から大きさや出っ張り高さは分かりますが取っ手部分の形状はレンダリング画像から推測するしかないので大体の形状でモデリングします.
洗濯機両側面の移設用の取っ手は側面図と正面図から大きさや出っ張り高さは分かりますが取っ手部分の形状はレンダリング画像から推測するしかないので大体の形状でモデリングします.
洗濯機を設置するロボットのような取っ手を持つことを前提としたシミュレーションの場合は形状をより気にしてモデリングした方が良いかもしれません.
モデル形状の完成
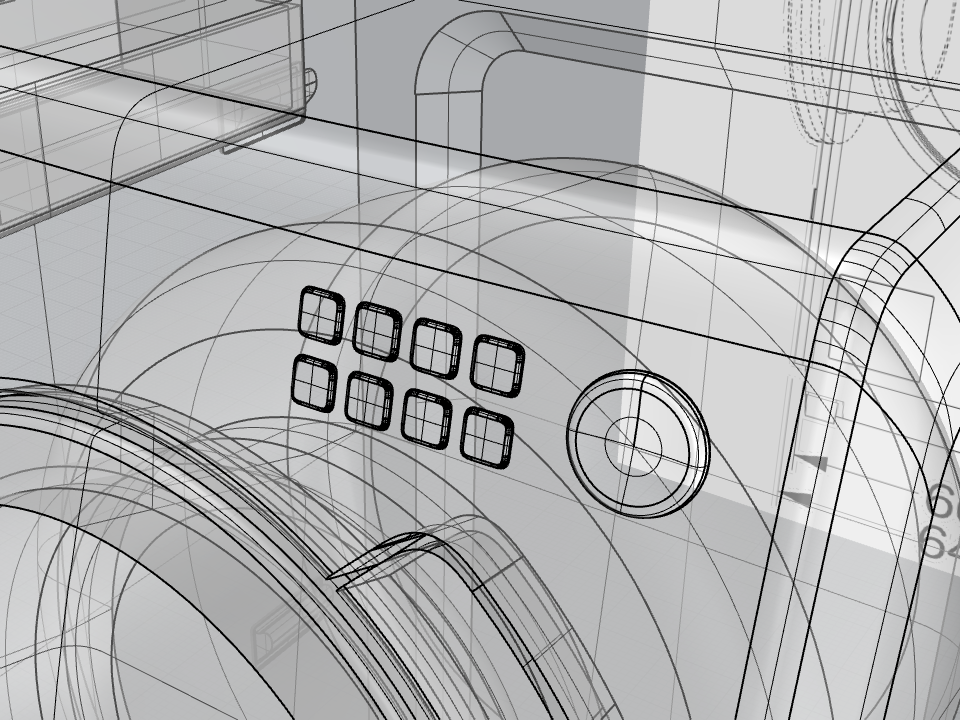 「Gazebo/MoveIt のための 3D モデリング(6)滑らかなサーフェス – 作成編(その1)」で作成した洗濯機前面上部のボタン類も現在の作業レイヤーにコピーしてソリッドの「和(BooleanUnion)」をします.
「Gazebo/MoveIt のための 3D モデリング(6)滑らかなサーフェス – 作成編(その1)」で作成した洗濯機前面上部のボタン類も現在の作業レイヤーにコピーしてソリッドの「和(BooleanUnion)」をします.
 また洗濯機前面上部のディスプレイ部境界線を YZ平面上 に描画して洗濯機前面サーフェスに「投影(Project)」してその曲線を用いて洗濯機前面サーフェスを「分割(Split)」します.
また洗濯機前面上部のディスプレイ部境界線を YZ平面上 に描画して洗濯機前面サーフェスに「投影(Project)」してその曲線を用いて洗濯機前面サーフェスを「分割(Split)」します.
 洗濯機本体側洗濯槽扉周辺の色違いで別部品となっている部分も正面図から大きさを拾ってサーフェスを「分割(Split)」します.
洗濯機本体側洗濯槽扉周辺の色違いで別部品となっている部分も正面図から大きさを拾ってサーフェスを「分割(Split)」します.
以上で洗濯機全体の形状が完成しました.
色分け前ですが表示形式をいろいろ変えて描画した様子が次のアニメーション画像です.
今回の記事はここまでです.
本シリーズ次回の記事は
「Gazebo/MoveIt のための 3D モデリング(11)形状データのエクスポート」
として,CAD( 本記事では Rhinoceros )の形状データを Gazebo や MoveIt で利用できるデータ形式にエクスポートする手順などを中心に紹介する予定です.
yamamoto.yosuke administrator
コメントを投稿するにはログインしてください。
著者について