MoveIt! motion planner 0.7.1 may be a fix to long, unorganizaed planning timeROS, MoveIt! バージョン0.7.1 で経路計算のより安定化が可能に
We talked about the latest MoveIt! update to 0.7.1. That change introduced several important/convenient new features, one of which is that you can now set the default planning algorithm (relevant ticket on github).
Before this change, LBKPIECE was set as a default planner and it wasn’t clear for the users how to make a change for it. The algorithm has reportedly not been finding solutions when working with MoveIt!, e.g. in our ROS introductory workshop we have to ask participants to go through counter-intuitive steps to change the algorithms for DENSO robot.
The new feature allows you to choose algorithm of your choice, e.g. RRTConnect.
If your robot already comes with moveit_config package but has not utilized this feature, you might as well do so.
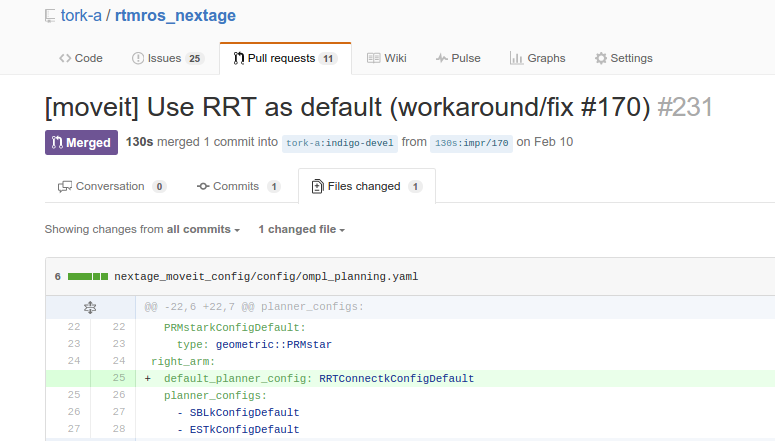
In NEXTAGE Open’s software, you can set the default planner like this in config/ompl_planning.yaml file in your moveit_config package (see this pull request for the full change).
前回紹介した MoveIt! バージョン更新により,0.7.1に上がり幾つか新機能が利用可能となりました.
その内の一つがデフォルトの経路探索アルゴリズム指定機能です (github 上の関連チケット).
いままでは起動時の経路探索アルゴリズムは LBKPIECE で,MoveIt! 上で動作させると解を見つけないことも多く,たとえば弊社のワークショップでは DENSO ロボットの MoveIt! 応用をご紹介しますが,その際にややこしい手順を経て経路探索アルゴリズムの変更する手順としていました.
本機能により,RRTConnect 等の解が出やすいアルゴリズムを MoveIt! 起動の際に 選択できるようになりました.もし,ご自分のロボットでデフォルトのアルゴリズムをカスタマイズしていない方がいらっしゃいましたら是非ご参考ください.
デフォルトプランナの設定は,NEXTAGE Open のソフトウエアの場合,お使いのロボットの moveit_config パッケージの config/ompl_planning.yaml に図のように変更することで行うことができます (参考 pull request).
Isaac Saito subscriber
著者について