NEXTAGE OPEN も登場:MoveIt! 5周年記念モンタージュビデオ
ROS の動作計画ライブラリ MoveIt! が,5周年を記念してアプリケーション例のビデオを公開しました.
MoveIt! チームがこのようなビデオを公開するのは4年前・2013年に次いで2度目ですが,ソフトウェア公開間もなかった当時と比べ,だいぶ Pick&Place,物を掴んで目的地に設置するというタスクが多く,技術の進展が窺えます.個人的には MoveIt! の課題領域としても挙げられている台車,水中ローバ等の移動体に取り付けられたアームの制御例が数件含まれ,既に実現されてるのかも気になります (このページの “Mobile base integration”).
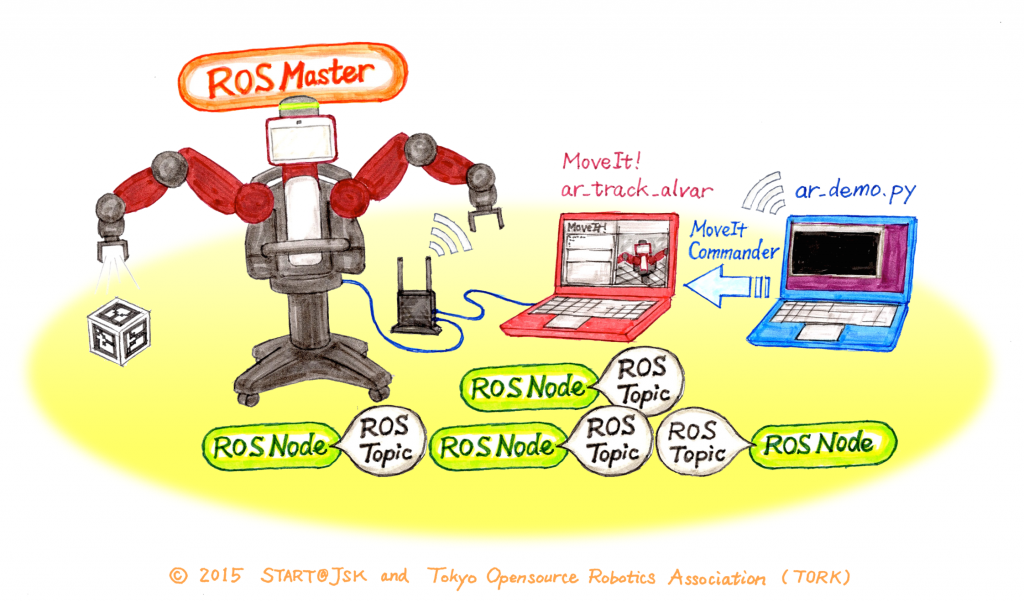
また弊社がその opensource 版ソフトウェアのメンテナンスに積極的に関わり,サポートサービスも提供させて頂いているカワダロボティクス社製 NEXTAGE OPEN も登場します.弊社ブログ上でもお馴染み?の Spain のシステムインテグレータ・Tecnalia 社が手がける Airbus 向けアプリと思われます.
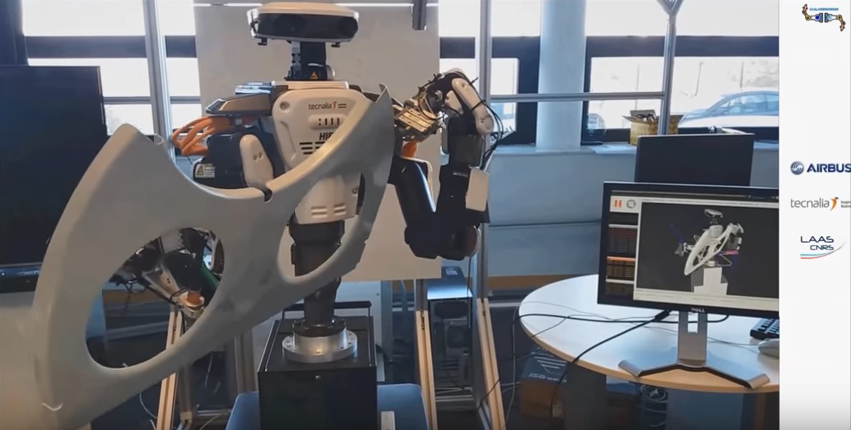
Hironx in motion from MoveIt! 5-year montage by courtesy of Tecnalia
TORK では2013年の創業以来,ROS,MoveIt! のソフトウェア改良,普及に貢献し続けています.貴社ロボットへの MoveIt! の導入御検討であれば,弊社ワークショップで体験もできますので,参加を是非御検討下さい.
P.S. 今回のビデオの開発者一覧も公開されました.
(0:06) Delft Robotics and TU Delft Robotics Institute
(0:09) Techman Robot Inc.
(0:13) Correll Lab, CU Boulder
(0:37) Nuclear & Applied Robotics Group, Unv Texas
(0:50) Beta Robots
(0:55) GIRONA UNDERWATER VISION AND ROBOTICS
(1:03) Team VIGIR
(1:34) Honeybee Robotics
(1:49) ROBOTIS
(1:58) TECNALIA
(2:05) Correll Lab, CU Boulder
(2:26) TODO Driving under green blocks
(2:38) ROBOTIS
(2:54) Fetch Robotics
(3:05) Hochschule Ravensburg-Weingarten
(3:12) TU Darmstadt and Taurob GmbH – Team ARGONAUTS
(3:20) isys vision
(3:27) Technical Aspects of Multimodal System Group / Hamburg University
(3:33) Clearpath Robotics
(3:43) Shadow Robot
MoveIt! 計画された軌道のビジュアライゼーション
2017年6月初のパッケージ更新により MoveIt! が更新され,これまで要望のあった軌道の目視確認機能が追加されました.
これまでは,生成させた経路を確認するには,RViz 上で “Loop Animation” をオンにして経路を反復再生させる手があったかと思います.この方法だと経路の途中の任意の経由点で止めることはできませんでした.
今回追加された機能を使うと,RViz 上でスライダを移動することにより,軌道の経由点を静止した状態で目視確認できます.
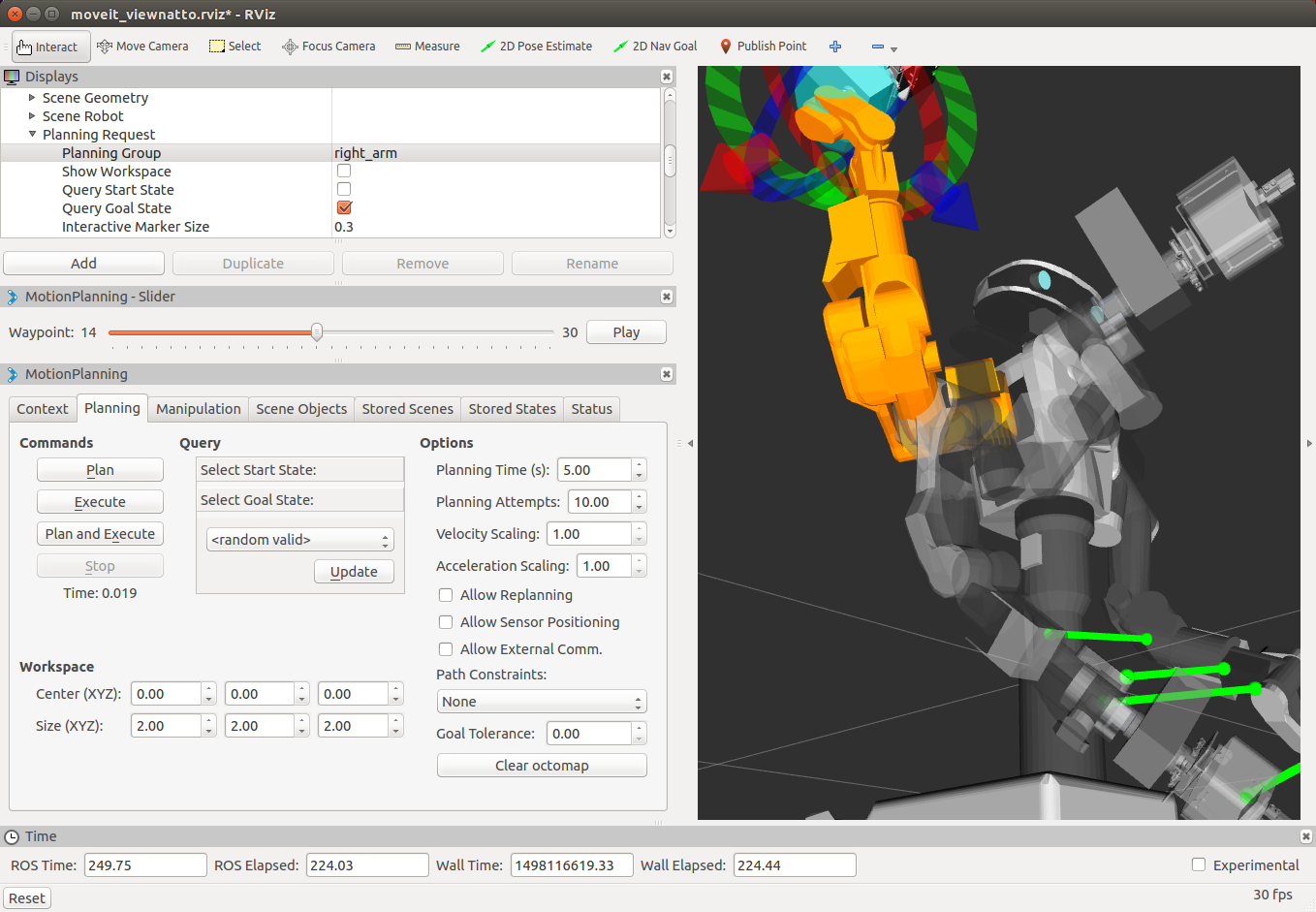
As you see on the slider on the left side, you can now introspect each waypoint in a planned trajectory on MoveIt! on NEXTAGE Open.
本機能を有効にする方法はチュートリアルを参照下さい.
(図面付き) NEXTAGE OPEN の頭部カメラのキャリブレーションHead-mount stereo camera calibration for NEXTAGE OPEN
NEXTAGE OPEN で頭部ステレオカメラを利用する際の,カメラの姿勢を手軽にキャリブレーションする方法を公開しました.
ROS では幾つかカメラを用いたキャリブレーション用パッケージが利用できます.ROS 初期の代表的ロボット PR2 向けに作られた calibration,産業用ロボット向けに豊富な機能を持つ industrial_extrinsic_cal,最近ではキャリブレーション結果を用いてロボットのキネマティクス情報を更新してくれる robot_calibration というのもあります.いづれもハードウェア and/or ソフトウェアの前準備が大変だったり,高機能ゆえに計算に時間がかかったりと,扱いに慣れが必要です.
今回ご紹介する方法は基本的にチェッカーボードをロボットに固定さえすれば実施可能です.詳しい方法を ROS wiki に記載しています.ステレオカメラで胸部あるいは腰部に固定したチェッカーボードを認識することにより,頭部カメラのロボット上の相対姿勢を取得します.カメラの据付位置座標が分かれば,Gazebo シミュレータ上でもキャリブレーションを行い相対姿勢を取得することが可能です.


胸部に付けたチェッカーボードを認識中

ロボットに固定したチェッカーボードを認識することで,ROS の座標変換ライブラリ “tf” により,カメラの正確な相対姿勢が判明します.


Gazebo 上の Kinect でチェッカーボードを認識している様子.
なお,キャリブレーションに用いたチェッカーボードの NEXTAGE OPEN 本体への取付けに必要な部品一式の図面もGitHub 上で公開しています.また,TORK では Xtion をかっこ良く頭部に取り付けたい場合 外装を御用意しています (日本国内のみ).
現状では上記 wiki ページで紹介されている方法は Kinect 或いは Xtion を利用しています.NEXTAGE OPEN がデフォルトで搭載する頭部の Ueye カメラ二基を用いても同じ方法は有効のはずですが,Ueye 個別の操作方法は未だ記載していません.ROS wiki は誰でも編集できるので,もし Ueye でキャリブレーションに成功した方がいたら是非情報を追記頂けると,全世界の NEXTAGE OPEN ユーザが喜ぶと思います!
Recently we’ve updated the instruction for the NEXTAGE OPEN’s calibration using head-mount stereo cameras.
There has been mutilple camera/robot calibration packages in ROS; calibration package worked well for the PR2 robot, a high-functional reference model of ROS in the early era until very recently. Then for industrial usage industrial_extrinsic_cal was developed with abundant functionalities to cope with complexed needs. Relatively newer robot_calibration package, which is maintained by the warehouse robot manufacturer Fetch, even updates the robot’s kinematics parameters using the calibration result. Almost all of these practical features come with a cost of labor in hardware and/or software, however.
The approach we’re presenting is simple enough since all you need is a checkerboard — not even a board but a plain or even a piece of paper will do as long as checker matrix is printed on it. Detailed steps are available on ROS wiki. Basically get the pose of the camera mounted on top of the head or actually anywhere on the robot, by recognizing the checkerboard. You can also carry out the calibration on Gazebo simulation as long as you know the location to attach the camera so that you can spawn the camera’s 3D model in the virtual world.
Detecting a checkboard at the chest.
Recognizing the checker pattern, which is in a fixed pose w.r.t the robot, yields the camera’s relative pose w.r.t the robot as a result of “tf” computation.
Seeing checkerboard through a simulated Kinect on Gazebo.
We’ve also made the design of the checkerboard kit publicly available on NEXTAGE OPEN’s GitHub repository so that any handyperson can go through these steps.
As of now the instruction in the wiki above only uses Kinect or Xtion, i.e. the operation of the Ueye cameras that NEXTAGE OPEN comes with by default is a bit different but that’s not documented yet, although the calibration part is intended for any ROS-based stereo camera so it should work for Ueye too. Every one is welcomed to edit ROS wiki to add your findings in this regard. Power of opensource!
2017 MoveIt! 新機能その2;動作の停止.求ム実機テスター!2017 MoveIt! update pt.2; Stopping motion on NEXTAGE needs your help
MoveIt! の年初一発目の更新については前回機能を一つ,NEXTAGE Open を利用してお伝えしました.今日ご紹介する動作計画の停止機能は,弊社でも要望を何度もユーザ様から伺っていた機能です.
平たく言えば,ロボットが任意の動作を実行している最中に,途中で停止する機能です.動作を停止したい状況は安全に関わるケース以外でもいろいろ考えられるため,非常停止装置などを用いて危険回避目的でロボットの全動作を停めるのではなく,プログラミングのレベルで特定の動作だけを停止ができるとアプリケーション開発上嬉しいことがあります.MoveIt! ではこの停止する標準的な方法がなかったのですが,今回追加されました (ちなみに本機能の作成は GSoC で日本人の修士学生が主導した模様).
早速 Pepper のシミュレーションで使ってみました.
In the previous post we introduced one of the many new features that were added to MoveIt! with its first update in 2017. Next feature we want to mention is the “stop motion”, which we’ve received many questions from our NEXTAGE users about.
Other than situations where you need to stop robots to move for the safety reasons, there can be many cases you want to stop/cancel/halt your robot for your application. The standard way to achieve this in MoveIt! had been lacking, which is finally organized this time (lead by a student at GSoC project by the way).
It works well with Pepper robot on simulation. You see the arm stops as soon as the “stop” button on RViz was clicked.
RViz 画面上に新たに追加された “Stop” ボタンを押すと,腕の動作が止まっているのがわかりますでしょうか.
この便利機能なのですが,弊社がサポートする NEXTAGE Open のオープンソースソフトウェアではまだ動作しません.修正パッチが作成され,シミュレーション上では期待通り動作することが確認されましたが,ロボット実機の挙動への影響があり得るため,実機テストが必要となっています.NEXTAGE Open をお持ちの方々で,もしテストに協力しても良いという方がいらっしゃれば,info[a_t]opensource-robotics.tokyo.jp 宛に連絡頂くか,Github 上の当該の問題のチケットに書き込みいただければ,ご支援させて頂きます.
This nice feature, however, does not YET work with the NEXTAGE Open. Don’t worry much, there’s a work going on already and we confirmed a patch submitted from a community member solves the issue on simulation! We just need to test the patch on the real NEXTAGE Open robot, and this is where we need a help from the robot owners. If you think you can help us testing with your own robot, please contact TORK at info[a_t]opensource-robotics.tokyo.jp or joint the discussion at the ticket for this issue on Github so that we’ll communicate with you. Thank you for your understanding toward opensource!
First MoveIt! Update in 2017. Using it on NEXTAGE pt.12017年始早々 MoveIt! 新バージョンがリリース.NEXTAGE で使ってみる その1
MoveIt! の最新バージョンが公開になりました.昨2016年にメンテナンスチームがリニューアルして以降,MoveIt! の開発が活発になり,それまで溜まっていた問題報告やパッチ候補の処理が加速しました.今日現在利用可能な ROS の3つの異なるディストリビューションそれぞれに最新版がリリースされています (Indigo 0.7.6, Jade 0.8.3, Kinetic 0.9.3).今回のリリースではバグ修正に加え,ユーザの要望の高かった機能も幾つも追加されています.その内の一つの機能をカワダロボティクス社の NEXTAGE Open のシミュレータを用いて見てみます.
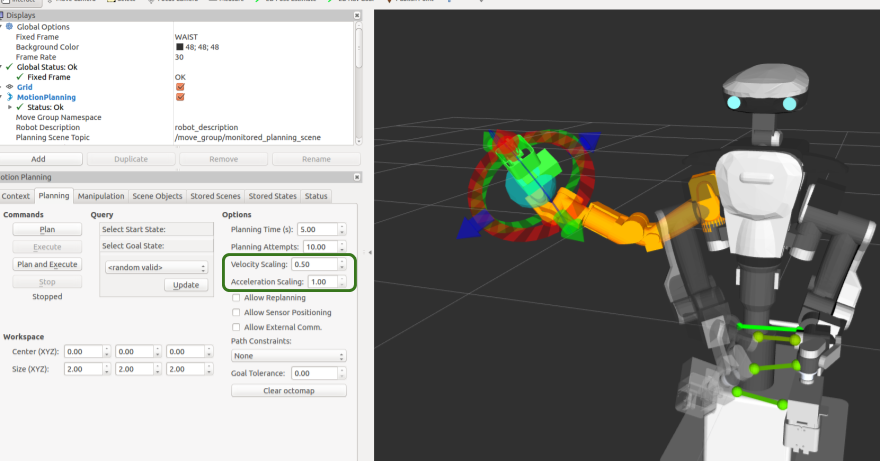
1.軌道実行時の際の速度・加速度をの動的に変更
MoveIt! の RViz プラグイン上に新たな機能が追加されました.スピンボックス上の値を 0-1 の間で変更することでロボットアームの軌道実行の速度,加速度を変更できます.
御自身のロボットの3次元モデルファイル (URDF 或いは SRDF) 内に指定している関節速度/加速度を0-1の間でスケールすることができるようになっています.
New version of MoveIt! binary 0.7.6 is just released for ROS Indigo, first time in 2017 (for sure!) and first release since June 2016. This version comes with some long-wanted features (along with bug fixes of course) that we’re trying out using NEXTAGE simulator.
1. Changing trajectory velocity and acceleration during runtime
Changing the speed of the trajectory during runtime has been one of FAQs from NEXTAGE users who use MoveIt!, let alone many MoveIt! users on the globe. Now through MoveIt! RViz plugin you can conveniently configure that on the fly on the spinboxes added.
RViz 上でなくプログラマティックに変更したい場合は MotionPlanRequest トピックの値を変更することで runtime/プログラム実行中に変更できます.
次回に続く.
To configure that programmatically, see this tutorial that explains chainging MotionPlanRequest topic would do the work.
TORK is very actively contributing the development and maintenance of MoveIt!.
Dynpick force-torque sensor ROS driver update thanks to opensource contributionOpensource にしているおかげで Dynpick 力覚センサ の ROS ドライバの対応機種が増えました
弊社がメンテナンスに貢献している,ワコーテック社の力覚センサ Dynpick の ROS ドライバは,これまで販売終了機種でしか動作確認ができていませんでしたが,販売中の機種でも動作確認ができました.
...といっても弊社が動作確認を行ったのではなく,オープンソースコミュニティのユーザ (独・Fraunhofer IPA の方) がセンサを購入,動作させて報告を下さいました.
対応がとれた機種に関しては,同ドライバの wiki ページに掲載していきます.動作確認の報告は,Github ページで行って頂けると幸いです.
ROS device driver for force-torque sensor Dynpick, one that TORK joins its maintenance, has been known to work for a discontinued product only so far. Now someone in the opensource community just confirmed that the package works with a product that’s still available!
Products confirmed to work has been and will be updated on the driver’s wiki page. Report, questions can be posted on its Github page.
And as always, may the power of opensource be with you. Happy holidays!

Dynpick (Image source)
TORK to co-host Toyota HSR workshop for usersトヨタ HSR ユーザ向けセミナを行いました
トヨタ自動車株式会社 (以降トヨタ) 様 の生活支援ロボット “HSR”のユーザ様向け技術者セミナを,全国4箇所にて開催しました.
TORK はこれまでにも2014年の第1回,昨・2015年の第2回のハッカソン開催へのご支援を中心に HSR 開発に御協力をさせて頂いてきました.昨年までは HSR を所有するユーザが未だあまり居ない中での開催でしたが,HSR 開発者コミュニティが昨年発足し,HSR を所有する組織が拡大したのを受け,今回はそれら所有者で形成されるコミュニティのメンバー向けでした.
HSR の扱い方や ROS を用いたプログラミングといった技術的内容に加え今回は,トヨタ様の意向もあり,開発者コミュニティの積極的な利用に重きを置きました.
ユーザがネット上でグループを形成し議論する”コミュニティ”は,ROS をはじめ多くのソフトウェアのプロジェクトが汎く普及するにあたってその整備が欠かせないと言われています.HSR 用の開発コミュニティはトヨタ様が直接運営し,メンバ間での情報共有や議論に必要なツールが提供された本格的なものです.コミュニティをうまく利用することにより,御自身の開発を加速できると共に,開発者コミュニティ自体が成長し,それによって御自身の開発に更にメリットが還ってくる,という良い循環が生まれます.そうして一組織だけでなく,HSR 開発者コミュニティ全体で成果を共有し発展していくのが狙いです.
TORK has been partnering with the “HSR” welfare robot’s dev team at Toyota Motors Corporation (TMC). In 2014 and the last year 2015 we worked together with them for the hackathon.
This year we worked with TMC again to host developers workshop at 4 venues in Japan. In addition to going over the robot’s unique features and programming using ROS, we particularly focused on utilizing the online community designated for HSR owners, which TMC initiated in 2015 and maintains by themselves (membership-only as of today). Goal is that participants get hands on experience in interacting on the developers community so that they can accelerate their own development, which also contributes to develop the community size and maturity, which the developers ultimately appreciate. That said the seminar series this time is the beginning of building the communiy’s life cycle as TMC’s dev team intended.







本セミナ期間中は,プログラムを実行しても動かないだとか,実装の方法が分からないといった問題に当たったら,問題解決を自分だけで行うのではなく,コミュニティに質問し意見を伺いながら進めるよう提案しました.質問文を作成すること自体慣れないと時間が取られますし,技術者として他人に質問するのも,研究室ごとの質問に関する文化もあってか,勇気がいることでしょう.最初は中々質問が出ないこともありましたが,トヨタ様はじめ積極的な回答者の適切な回答のおかげもあり,質問するメリットを感じて頂けたかと思います.何より,セミナ実施後は実施前に比べ開発者コミュニティでの情報の流通量が大きく増えました.
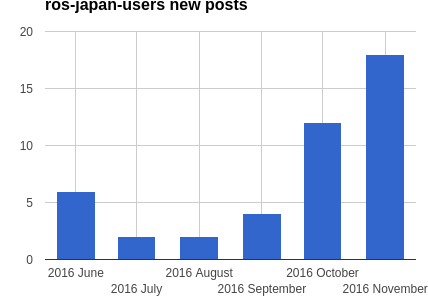
またセミナ中,HSR に依存しない問題 (ROS 一般に言える問題等) についてはそれぞれのコミュニティを利用することをお伝えし,コミュニティ例として ROS 日本語ユーザグループ “ros-japan-users” を紹介し,セミナ中に何度か試しに投稿して頂きました.その効果なのかどうか分かりませんが,セミナ開始した2016年10月以降の同グループの投稿数が下図のように一気に増えました.もし本セミナの参加者様が質問することに抵抗が減ったのであったり,セミナ無関係の方でも投稿が増えたのを見て質問する心理的障壁が少しでも下がった結果であったりするなら幸いです.
Also discussed is problem isolation – engineers often need to figure out the types of problems and post questions at the best community per incident. This is more an advanced subject, but participants well exceeded our expectation to separately post HSR-specific questions and generic-ROS questions on the forums of each. This may have resulted in the positive spike of the number of posts at the ROS Japanese user groups as you see in the graph below (workshop series started in October).
最後に幾つか,各セミナ回の最後に行ったコーディングチャレンジの動画をご紹介して終わります.HSR・ロボットコミュニティの益々の発展に微力ながら貢献できていれば何よりです.
Closing this blog post with some videos from the code challenge at the end of the workshops. We truly hope that we’ve contributed to the HSR and the world of robotics community by encouraging community involvement.
catkin-tools – our OSS contribution pt.2 catkin-tools 便利機能に貢献しました その二
Following our previous post about a nice hidden tip for catkin-tools, here’s another one.
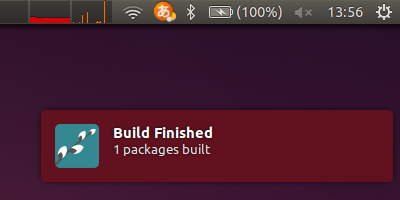
When finishes compilation, `catkin build` shows a pop-up window at the top-right on your screen (if you’re on Ubuntu Linux), which indicates `Build Finished` or `Build Failed`. This is nice in that you can work on another windows without payting attention to catkin’s progress. Caveat is, though, that “Finished” and “Failed” aren’t that obviously differentiating whatsoever.
With the newer version of catkin-tools, 0.4.3 or higher, the window pops up with a distinguishable colors; Green for success and red for failure.
This little but significantly effective change is done by our TORK associates again. The change was made swiftly and neatly as it has always been in the opensource software community.
先日ROS の非公式ビルド/コンパイルツールである catkin-tools について便利な技を紹介しましたが,今日ももうひとつ便利機能を紹介します.
`catkin build` を実行してコンパイルしたあと,ディスプレイの右上に `Build Finished` または `Build Failed` というポップアップウィンドウが表示されますね.これで,catkin-tools を実行しているターミナルで以外のウィンドウで作業していても,コンパイルが終わったことを瞬時に知ることができます.でも,これ,英語に慣れていないと,Finished (終了,正常) なのか Failed (失敗) なのかを瞬時に把握するのが難しいですよね.いや,英語に慣れていても紛らわしいですかね.
そこで catkin-tools のバージョン 0.4.3 からは,成功していたら緑色,失敗していたら赤色のアイコンが表示されるように改善されました.
ちなみにこれも TORK 関係者のプルリクエスト (変更案の提供) によるものでした.こういう小さい改良を根気よく皆で続けることがオープンソースの強みですね.
UPDATE 1/6/2017 catkin_tools 0.4.3 がやっとリリースされ,ここで取り上げている機能が使えるようになりました.記事先行してしまいお待たせしていたら失礼しました.

catkin-tools tipcatkin-tools 隠れ便利機能その一
ROS ではコンパイルを行う catkin_make という独自ツールが用意されています.CMake というソフト開発でとてもよく使われるコンパイルようツールを拡張したもので,沢山のソフトウェアパッケージを一気にコンパイルする必要も往々にして発生するロボティクスにおいて便利なツールです.一方で,遅い!だとか,コンパイル実行の度にいちいちフォルダ移動めんどい!等課題も多く指摘されており,非公式ではありますが改良版の catkin-tools というのがあります.先に述べたような根本的な問題から,痒い所に手が届く的なウレシイ機能までよく出来たツールで,人気を集めています.
使い方等は上記リンクを辿っていただくことにして,今日はまったく知られていないもののなかなか便利な機能を紹介します.
catkin_make あるいは (catkin-tools だと) catkin build を実行しコンパイルした後に,コンパイル成功したソフトの情報をターミナルに読み込ませるために次のようなコマンドを実行することになっているかとおもいます.
source ~/catkin_ws/devel/setup.bash
コンピュータ上の path を意識させないのが ROS なので,上のコマンドには違和感を感じ続けてきた方も居たのでしょうか.catkin-tools はやってくれました.まず
source `catkin locate --shell-verbs`
とすると,catkin source というコマンドがつかえるようになります (back quote に注意).このコマンドは絶対 path を意識せずに環境情報の読み込みが可能にします.例えば,
cd ~/catkin_ws/src/ros_seminar catkin source
と実行すると,上記の絶対 path コマンドと同じことをしたことになります.どのディレクトリにいても大丈夫なので,例えば次のどれでも結果は同じになります.
cd ~/catkin_ws/src/ros_seminar cd ~/catkin_ws/src/ros_seminar/rosseminar_hironx cd ~/catkin_ws/src/
便利ですね!ROS ではコンパイルを行う catkin_make という独自ツールが用意されています.CMake というソフト開発でとてもよく使われるコンパイルようツールを拡張したもので,沢山のソフトウェアパッケージを一気にコンパイルする必要も往々にして発生するロボティクスにおいて便利なツールです.一方で,遅い!だとか,コンパイル実行の度にいちいちフォルダ移動めんどい!等課題も多く指摘されており,非公式ではありますが改良版の catkin-tools というのがあります.先に述べたような根本的な問題から,痒い所に手が届く的なウレシイ機能までよく出来たツールで,人気を集めています.
使い方等は上記リンクを辿っていただくことにして,今日はまったく知られていないもののなかなか便利な機能を紹介します.
catkin_make あるいは (catkin-tools だと) catkin build を実行しコンパイルした後に,コンパイル成功したソフトの情報をターミナルに読み込ませるために次のようなコマンドを実行することになっているかとおもいます.
source ~/catkin_ws/devel/setup.bash
コンピュータ上の path を意識させないのが ROS なので,上のコマンドには違和感を感じ続けてきた方も居たのでしょうか.catkin-tools はやってくれました.まず
source `catkin locate --shell-verbs`
とすると,catkin source というコマンドがつかえるようになります.このコマンドは絶対 path を意識せずに環境情報の読み込みが可能にします.例えば,
cd ~/catkin_ws/src/ros_seminar catkin source
と実行すると,上記の絶対 path コマンドと同じことをしたことになります.どのディレクトリにいても大丈夫なので,例えば次のどれでも結果は同じになります.
cd ~/catkin_ws/src/ros_seminar cd ~/catkin_ws/src/ros_seminar/rosseminar_hironx cd ~/catkin_ws/src/
便利ですね!
NEXTAGE Open in Singapore revisited: both hands assembly using camera imageNEXTAGE Open in シンガポールその2:画像処理と両手を使った物品組み立て
ROS が普及したことで,ロボット開発者の間である種の共通言語となりつつあると言っても過言ではありません.既に多くのロボットの可動実績があり,ユーザ数は10万人を超えるとも言われ (2015年 ROSCon より),ロボットのシステム構築において着実に情報が蓄積されており,それを元に更に益々ユーザ層が厚くなるといった良い循環ができています.
とはいえロボット毎のハードウェアの違いを基にした差異は避けられないもの.同じロボットを扱う開発者間の情報は貴重でしょう.
弊社がソフトウェアのメンテナンスを中心となって行わせて頂いている NEXTAGE Open (カワダロボティクス社) も世界中にユーザがおり,私達も情報共有に微力ながら貢献しています.NEXTAGE Open の ROS 版ソフトウェアの利用に際して,議論はメーリングリストへ,御質問は github へどうぞ.
[github-issues username=”tork-a” repository=”rtmros_nextage” limit=”10″]
表.github 上で議論中のチケット一覧
今日は,先日もお伝えしたシンガポールの Nanyang Technological University (NTU) の研究者が公開している,NEXTAGE Open の動画を紹介します.今回はカメラからの入力を元に幾つかの Pick&Place を行っているようです.今のところこれら動画中のアプリケーションソフトウェアは公開されていないようですが,御興味があれば動画サイトのコメント機能でコメントで開発者に連絡してみると良いでしょう.
One of its many achievements as ROS being used for more and more robots is that it’s becoming a common language for the robot developers. One estimate (which is actually made by the CEO at OSRF, the maintenance organization of ROS) indicates that the userbase has now well reached 100,000 at the time of 2015 ROSCon. With vast amount of userbase with accumulated information for robot system development, we’re seeing a very successful lifecycle of ROS collectively expanding more info and users.
Still, flesh side of robots – hardware – inevitably differentiates the application level of development per robot, and therefore the conversation among the users of the same robots is valuable. For NEXTAGE Open (Kawada Robotics Inc.), the one that we TORK has been actively maintaining, there are a couple of active forums: discussion can be started at mailing-list and questions at its github.
[github-issues username=”tork-a” repository=”rtmros_nextage” limit=”10″]
Table. Current issues of NEXTAGE Open ROS software on github
Today we have a few videos from researchers from NTU (Nanyang Technological University) (there was one blog post before already) in Singapore that utilize vision input for pick & place application. Code for these app are likely not yet publicized but you can contact the researchers’ group by commenting on each video on the video sharing website.
3周年とサポート・コンサルティングサービスの実績経過TORK’s 3rd year mark and our support/consulting progress
2016年8月8日,おかげさまで TORK は設立3年を迎えました.
ロボティクス技術を使った製品開発に対する世間の関心の高まりに呼応してか,弊社としてもロボットへのオープンソースソフトウェア適用について企業様の関心の高まりを感じる一年でした.2014年度から行ってきた ROS ワークショップ (初級編,中級編等) は引き続き好評を頂き毎月開催しています.
また,創業以来続けさせて頂いているカワダロボティクス様の双腕ロボット NEXTAGE Open 用オープンソースソフトウェアのサポートサービスも順調にご利用頂いています.それに加えこの一年で,新たにロボットの種類を限定せずにお問合せに応えるチケット制コンサルティングサービスを開始し,企業様の多種多様なリクエストにより柔軟にお応えできるよう努めてまいりました.
これらのサポート・コンサルティングサービスはこの1年間で合計72回のお問合せを頂き,94%にあたる68件が解決・終了したか,或いは解法案をご提示済です.分野別では NEXTAGE Open で41件,それ以外の分野でのコンサルティングで31件頂戴しました.1年毎のお問合せ件数ですと,2015年8月時点では46.7件のペースでしたので (参考:昨年同時期の記事によると2014年1月から2015年8月までで74件の問合せ),1.5倍超のペースでお問合せ頂いていることとなります.
コンサルティングサービスの内容は,既存のオープンソースロボットに関するもの (Baxter,Turtlebot,Fetch 等),ROS のモジュールの使い方やカスタマイズ方法,自社開発への ROS 適用上のお悩み等を頂いています.カスタマイズのお問合せが転じてカスタム開発の依頼を頂くケースも出てきました.
これからも,お客様のご要望に応え,産業・学術界でのオープンソースロボティクスの進展に寄与できるよう,より一層努力して参ります.
TORK has just passed 3rd annual mark on August 8th, 2016.
Along with the global trend of robotics business and research boost, we’ve been happilly receiving interests and requests for opensource robotics technology development that we’ve contributed to and have been supporting for since our day 1 in 2013. Our ROS workshop series (beginners,intermediate etc.) are successfully running multiple times every month.
Our ticket-based support service for the dual-arm industrial robot NEXTAGE Open (Kawada Robotics) is growing its user base as well. This year round, in addition, we started opensource robotics consulting service. This new service is not restricted to a certain robot nor technology, but only limitation is “opensource robotics”, so that we can work with corporate engineers and managers for their problems regarding their robotics projects.
During the last 1 year period, we’ve received 72 tickets for total, 41 for NEXTAGE Open and the rest of 31 for other subjects. 68 tickets (94% of overall tickets) are solved/closed or possible solution is proposed to the customers. Compared to the previous year, we’re getting 1.5 times more requests (46.7 tickets/year at Aug 2015 according to the last year’s post).
Thank you all for your business with us, and understanding toward the opensource robotics.
How to create a page of your robot on ROS wikiROS wiki に自社/自分のロボットを掲載する方法
ROS で動くロボット,ROS が使われているロボットは一体幾つあるのですか?というのはとてもよく耳にする質問です.全貌の把握を試みるのは別な方に譲るとして,ROS の情報が一元的にまとまっている ROS wiki 上には,ROS 対応ロボット一覧ページがあります.たった今ざっと数えたところ,100種類は確実に超えていることを確認したところで,思考が停止しました.このページは手動で管理されているものなので,勿論これで全部ではないと思うと,多いですね.
このロボット一覧ページは前述の,ROS 対応しているロボットを知りたい,といったニーズに応える現状の最適な場所だと思われます.アクセス数も ROS wiki 全ページ群の中で9番目に多い (2015年7月の調査) とのことで,自社のロボットをここに掲載することはそれだけでロボット業界への効果的な告知になり得る,と考えられるのではないかと重います (ただしあくまで中立のコミュニティですから,やり過ぎな商業的告知には指摘が入る可能性もあります).
さて,ではどうやってこのページヘの自身のロボットを掲載するか.この方法が分からないという声も最近頻繁に耳にするようになりましたので,ROS wiki 上にその方法をまとめました.このページをご覧ください.
#私も自己流で編集して叱られたりコンテンツ削除されたり,時には褒められたりしながら学びました*
本件でご不明点があれば,ROS に関する質問はいつも通りの answers.ros.org か,日本語 ML でお問合せされるのが良いと思います.あと,弊社も有償でコンサルティングサービスを行っています 🙂
One of the common questions surrounding ROS is that how many robots are “ROS-compatible”? While we wait for someone else for figuring out the exact number, on ROS wiki, central source of information regarding ROS, there’s a manually-maintained list of robots that work with/on ROS. Skimming through it yields easily over 100 robots.
This listing page apprently functions as the best monolithic source of all ROSified robots as far as we are aware of, and it’s proven to work for the purpose; access rate of the page is 9th highest among all pages on ROS wiki (according to metrics in July 2015). So it makes a total sense to list your own robot on that page to get a good, effective exposure to the global robotics community (you just have to respect that the entire ROS wiki is commercial-free zone; No aggressive advertisement should take place).
Then, to answer the next common questions we’ve recently heard of, which is how we can add a list on the wiki page, we just added an instruction. Please go to this page on ROS wiki for that.
Questions regarding the instructions should go to answers.ros.org as always.
Image: Part of the robot list. Robots we (TORK) maintain the ROS packages (NEXTAGE Open, Denso etc.) are there too.
Easy Teaching Operation for NEXTAGE Open by MoveIt! JoystickMoveIt! のジョイスティック機能で NEXTAGE Open を楽々ティーチング
ROS の動作計画アプリ MoveIt! を使った開発を行っている方々の中には,MoveIt! のバイナリ提供は更新が滞ってるから仕方なくソースコードをコンパイル (そしてコンパイルエラーと格闘) して時間を費やしてしまっている方もいるのではないでしょうか.ご安心下さい.最近メンテナンスチームが刷新されソフトウェアの更新が再び活発になってきており,今年に入って既にバイナリは3回更新されました.TORK もメンテナンスに積極的に貢献しています.
当協会のブログでも最近何度か MoveIt! の利用法についてご紹介してきました ([1],[2]).今回も新機能のご紹介です.今日紹介するのはジョイスティックから MoveIt! を制御する方法です.ロボットの動作生成・実行が,今までのように Rviz 上でマウスを使うことなく,ジョイスティックで可能になりました.
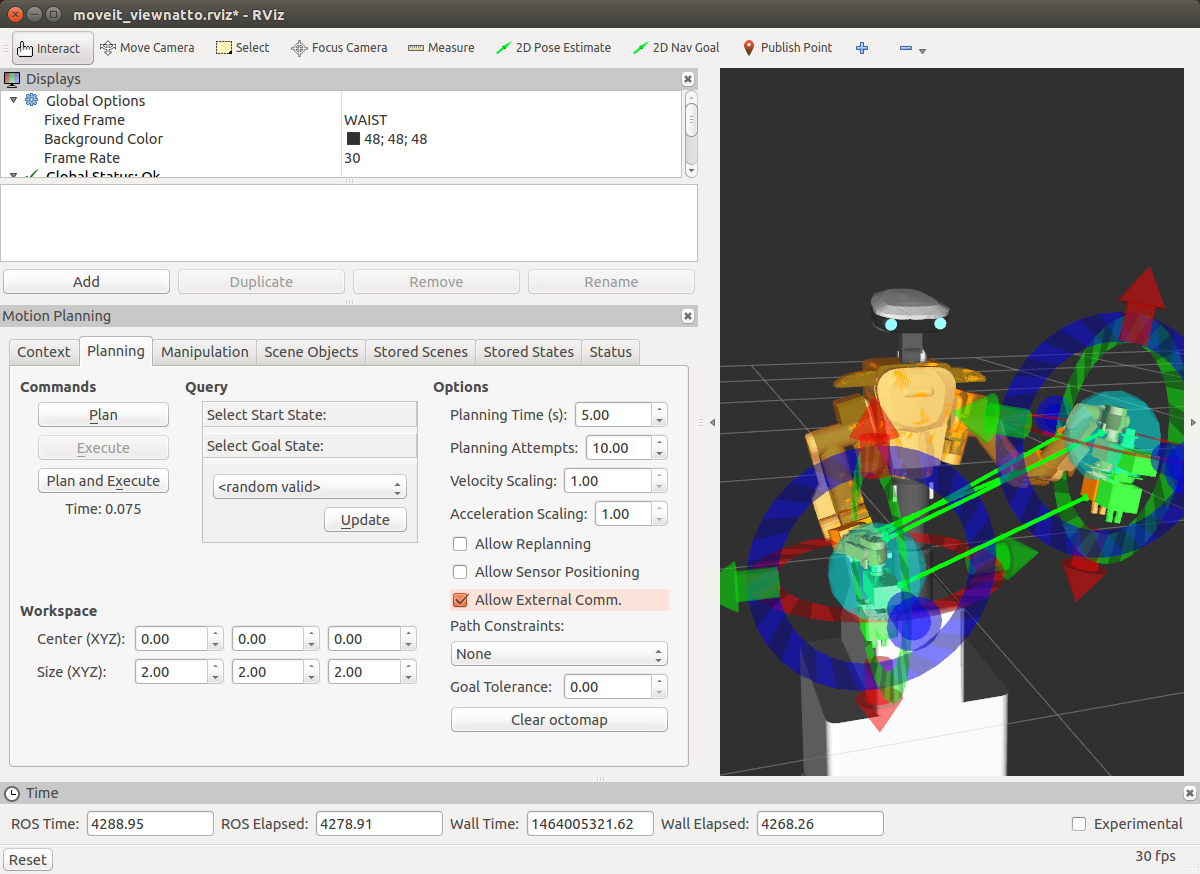
使い方は簡単.ジョイスティックが刺さったマシン上で,図のように Planning タブの AllowExternalExecution にチェックをして下さい.
あとは,以下の launch ファイルを立ちあげればジョイスティックでロボットを動かすことができます.ジョイスティックのコマンド等詳細な利用方法はこちらの WEB ページをご覧ください.
<!-- https://github.com/ros-planning/moveit_setup_assistant/pull/90 -->
<launch>
<arg name="dev" default="/dev/input/js0" />
<!-- Launch joy node -->
<node pkg="joy" type="joy_node" name="joy">
<param name="dev" value="$(arg dev)" /> <!-- Customize this to match the location your joystick is plugged in on-->
<param name="deadzone" value="0.2" />
<param name="autorepeat_rate" value="40" />
<param name="coalesce_interval" value="0.025" />
</node>
<!-- Launch python interface -->
<node pkg="moveit_ros_visualization" type="moveit_joy.py" output="screen" name="moveit_joy"/>
</launch>
また,NEXTAGE Open であれば,MoveIt! が起動している状態で次のコマンドひとつ起動すればジョイスティックが有効になります (jsX の値は変えて下さい).NEXTAGE Open 用の利用法をこちらにも記載しています.
One of good news about ROS community is that the maintenance of MoveIt! got revitalized where TORK is contributing to as well. In 2016 there has already been three binary update releases so far. No more building from source if you were forced to!
We’ve mentioned about MoveIt! a few times recently ([1],[2]), so do we today again. With the version 0.7.2 (on ROS Indigo), you can operate robot arms by joystick via MoveIt!
Running the feature is as simple as joystick. On RViz on the host where the joystick is plugged, check “Planning” tab –> “AllowExternalExecution” (see the image below).
Then run a launch file, either the one in your XXXX_moveit_config package if there’s already the aforementioned launch file, or simply make a launch file with the following:
<!-- https://github.com/ros-planning/moveit_setup_assistant/pull/90 -->
<launch>
<arg name="dev" default="/dev/input/js0" />
<!-- Launch joy node -->
<node pkg="joy" type="joy_node" name="joy">
<param name="dev" value="$(arg dev)" /> <!-- Customize this to match the location your joystick is plugged in on-->
<param name="deadzone" value="0.2" />
<param name="autorepeat_rate" value="40" />
<param name="coalesce_interval" value="0.025" />
</node>
<!-- Launch python interface -->
<node pkg="moveit_ros_visualization" type="moveit_joy.py" output="screen" name="moveit_joy"/>
</launch>
For the detail follow the usage page.
To run on NEXTAGE Open, make sure MoveIt! is running then run a single command below (modify jsX). You can also refer to wiki for joystick usage for NEXTAGE Open.
roslaunch nextage_moveit_config joystick_control.launch dev:=/dev/input/js1
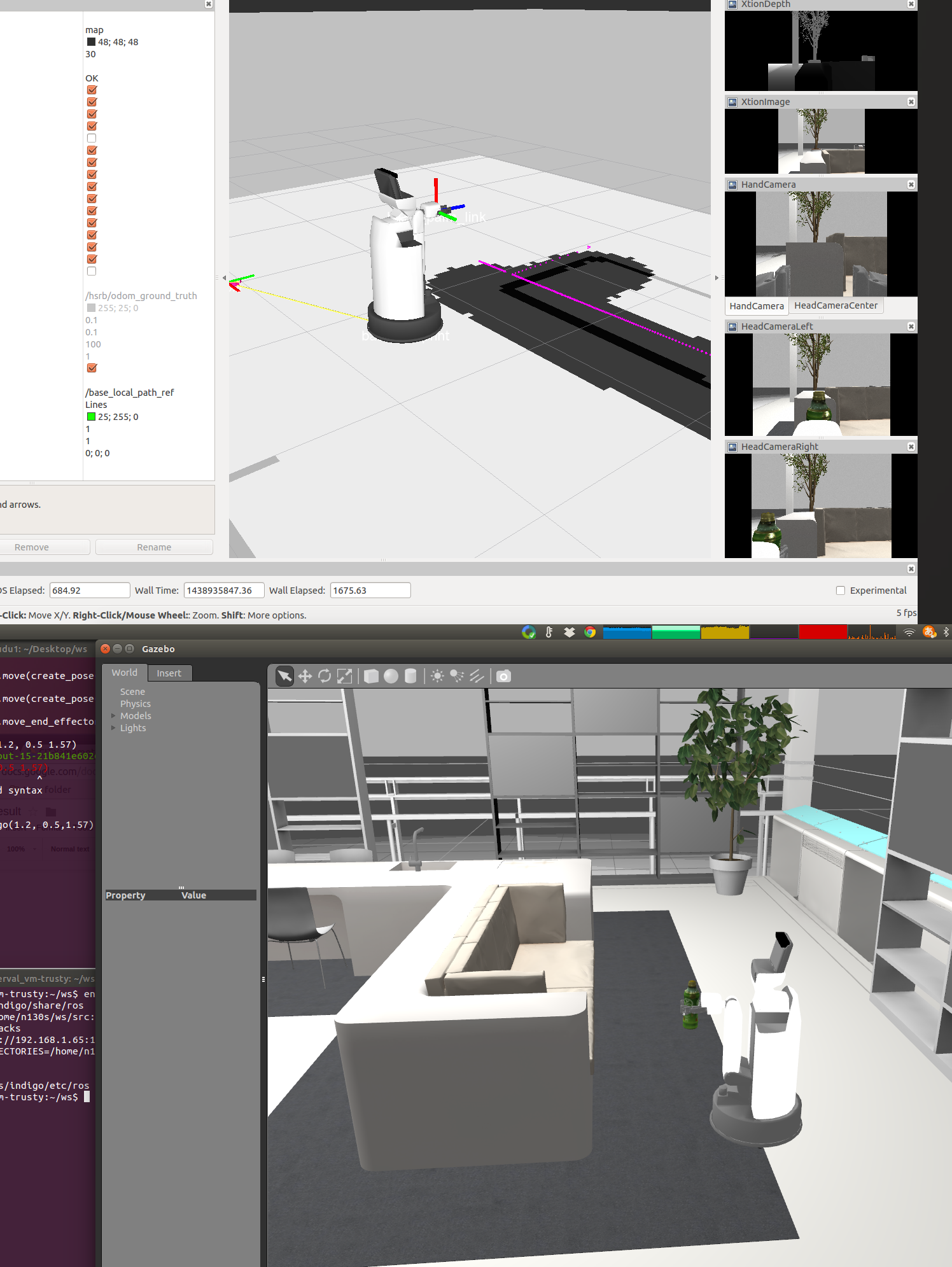
(At the top window, the human operator plans the movement on RViz visualizer. Once the plan looks good then operator executes the plan so that the simulated robot in the bottom window conducts the movement. This is a screen capture so joystick isn’t invisible, but yes, all the robot’s movement is commanded from a Sony PS3 joystick.)
Investigating unexplored region while making a map ROS で地図作成中に未開拓領域を探す
ROS でロボットが地図を作成する際に,大抵の場合はジョイスティックやキーボード等を使い,テレオペレーションでロボットに指示を即時で与えながらロボットを移動させているかと思います.中には,地図を作るためにロボットが”探索”する領域を事前に計画したい方もいるのではないでしょうか.
frontier_exploration というパッケージはそのための ROS インタフェイスを提供しています.今回 Turtlebot に frontier_exploration を組込んでみました.下の動画 (長いです…) では Gazebo シミュレータ上でサンプルの地図上に Turtlebot を出現させ,地図が無い領域/地点にロボットを向かわせています.画面下半分がシミュレータの,上半分が操作用の RViz のウィンドウです.
始めに探索したい領域をポリゴンで指定し,その中の一点を最後にクリックすることで,ロボットがその領域の探索に向かいます.ロボットが移動し始めてからはロボットは自律で移動し,ユーザは一切指示を与えていません.
手早く挙動を確認したい方はこちらの動画を (Turtlebot ではありませんが).
ここでは,探索計画は RViz 上で手動で行っていますが,向かわせたい地点を actionlib で送信しているため,API に従って計画をプログラムすることも可能です.
gmapping で地図作成を行い,move_base で移動を行うロボットであれば適用が可能です (他のパッケージを使う移動ロボットは試していませんが,難しくないはず?).
When making a map using ROS, you’re likely tele-operating your robot for every single move via keyboard or joystick at best. But I know a demand exists for “planning” in advance a region that robot explores to make a map.
That’s where a package called frontier_exploration gets useful; it provides ROS actionlib interface, through which users can send the location to explore. We just made a sample using Turtlebot to show how to integrate frontier_exploration package into your own robot. Resulted package can be seen at turtlebot_samples. As the following movie (It’s long! You’re warned…) shows, you can run by a single command Gazebo simulator, spawn Turtlebot on a sample map and send a command for the exploration.
You set the region to be visited by drawing a polygon on RViz, then after clicking a point within the polygon robot will move. Once it starts moving user isn’t sending anything (robot moves autonomously to the given goal along the computed path).
Shorter video is also available (it’s not Turtlebot. Video was taken by the original developer of the frontier_exploration package)
In these videos the robot is commanded manually on RViz window. You can also send commands programmatically using its API.
So far we confirmed that frontier_exploration can be applied to the robots with gmapping and move_base (incorporating with other navigation packages may be as simple?).
Thanks to opensource community, issue with NEXTAGE Open software (3D model geometry, tf) got resolved promptlyNEXTAGE Open ソフトウエアに不具合,オープンソースコミュニティにより迅速に修正完了 (3D モデル,tf の問題)
ユーザからの報告により NEXTAGE Open の tf の挙動に問題点がみつかりました.既に修正版をバイナリ (Ubuntu の apt-get でインストールする版のことです) で提供しています.修正版の適用方法等,詳しくは告知をご覧下さい.
製品のソフトウェアをオープンソースにするメリットの一つは,テストし報告してくれる人を多く集められることにあると,TORK は考えています.今回はまさにソフトウェアをオープンソースにしていたから起こり得た問題解決でした.解決までの流れはまさにオープンソースコミュニティのそれで,異なる組織から意見が共有された結果として,迅速に解決することができました;本問題現象を議論する github 上のチケットを時系列で追っていくと:
- ユーザが問題点を指摘
- –> メーカ開発者からコメント
- –> 別の組織のユーザからもコメント
- –> メンテナンス元 (我々です) が修正候補を作成
- –> ユーザが修正候補をテストし問題が修復されることを確認
- –> メンテナンス元修正候補が採用
4つの組織から一週間程度の間に意見が出され,解決にたどり着いているのがわかります.そしてこの特定の問題に義務がある人は (我々以外は) 居ないのです.これだけクイックに組織の壁を超えた問題解決が行えるのはコミュニティがオープンになっているからこそではないでしょうか.
更にその後のバイナリ作成と公開は,(これまで通り) ROS 管理チーム (OSRF) が運営するネット上の仕組みを利用させてもらっています.そこに至る手順は至ってシンプル (*1):
TORK は,ソフトウェアを公開することで,企業様が開発を加速し品質を高めていくことができると信じて,日々オープンソースに貢献しています.
*1 初回公開時にはやや長いプロセスを経る必要があります.しかしひとたび公開作業が終了すれば,その後の更新版の公開は上に書いたようにいたって簡単です.
A user reported an issue in tf with NEXTAGE Open software that got resolved in a quick fashion thanks to opensource collaboration across organizations/userbases. Binaries (the ones installable by apt-get) including the fix is already available online. Please see more detail of the issue and how to apply the fix this ticket on github.
We, TORK, thinks without any doubts that the big advantage of making software public is that you get testers from across the globe. The fix this time is a true realization of this opensource dogma; if I review the ticketed report for this issue on github now, you’ll see the flow:
- A user reported the issue.
- –> Someone from robot’s manufacturor gave a comment.
- –> Another heavy user commented.
- –> Maintainer (us) created a fix candidate.
- –> Reporter user tested fix candidate and confirmed that it fixes.
- –> Maintainer pulled in the fix.
At least four persons from different organizations contributed so far up to this point, within only a week timeframe. And everybody is not obligated to this ticket (but us).
Going further, once the fix is pulled then it’s also important to make the fix easily accessible by the users. Having them as binary form is the way to go. We do that by relying on the platform the ROS maintenance team (OSRF) runs, as have we already done so. Steps for that is really simple (*1):
- Submit a request for generating a binary (submission from this time)
- –> Announcement by OSRF that the binaries are ready (announcement made this time by OSRF)
TORK believes that opensource software development contributes to improving quality and fastening the engineering cycle for the corporations. That’s why we have and will continue contribution to the opensource community.
*1 Initial release takes a bit more steps. But once done so it’s really easy!
MoveIt! motion planner 0.7.1 may be a fix to long, unorganizaed planning timeROS, MoveIt! バージョン0.7.1 で経路計算のより安定化が可能に
We talked about the latest MoveIt! update to 0.7.1. That change introduced several important/convenient new features, one of which is that you can now set the default planning algorithm (relevant ticket on github).
Before this change, LBKPIECE was set as a default planner and it wasn’t clear for the users how to make a change for it. The algorithm has reportedly not been finding solutions when working with MoveIt!, e.g. in our ROS introductory workshop we have to ask participants to go through counter-intuitive steps to change the algorithms for DENSO robot.
The new feature allows you to choose algorithm of your choice, e.g. RRTConnect.
If your robot already comes with moveit_config package but has not utilized this feature, you might as well do so.
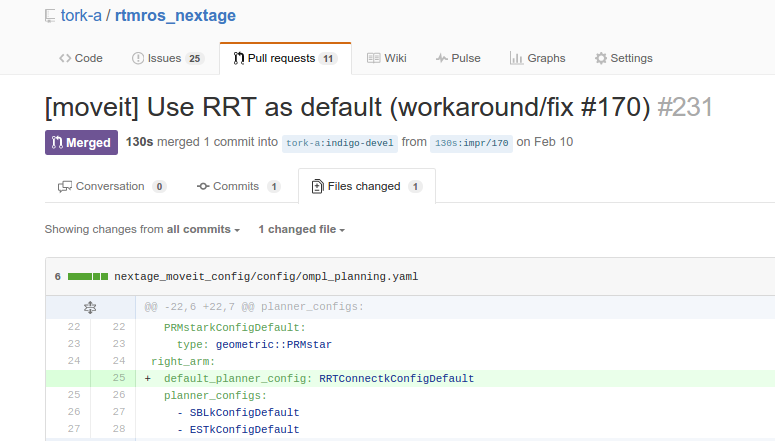
In NEXTAGE Open’s software, you can set the default planner like this in config/ompl_planning.yaml file in your moveit_config package (see this pull request for the full change).
前回紹介した MoveIt! バージョン更新により,0.7.1に上がり幾つか新機能が利用可能となりました.
その内の一つがデフォルトの経路探索アルゴリズム指定機能です (github 上の関連チケット).
いままでは起動時の経路探索アルゴリズムは LBKPIECE で,MoveIt! 上で動作させると解を見つけないことも多く,たとえば弊社のワークショップでは DENSO ロボットの MoveIt! 応用をご紹介しますが,その際にややこしい手順を経て経路探索アルゴリズムの変更する手順としていました.
本機能により,RRTConnect 等の解が出やすいアルゴリズムを MoveIt! 起動の際に 選択できるようになりました.もし,ご自分のロボットでデフォルトのアルゴリズムをカスタマイズしていない方がいらっしゃいましたら是非ご参考ください.
デフォルトプランナの設定は,NEXTAGE Open のソフトウエアの場合,お使いのロボットの moveit_config パッケージの config/ompl_planning.yaml に図のように変更することで行うことができます (参考 pull request).
Real-time Impedance Control on NEXTAGE Open Dual-arm Robot Using Dynpick F/T Sensor双腕ロボット NEXTAGE Open での実時間 impedance 制御が Dynpick F/T センサにも対応
カワダロボティクス社製の双腕ロボット NEXTAGE Open (/ Hironx) の力センサを用いた実時間制御は以前のブログ記事でお伝えしました.当時の例で用いていた JR3 力センサは日本国内では販売が終了 (*1) していますが,今回日本国産,ワコーテック社の Dynpick センサに対応しました.
Dynpick 小型静電容量型6軸力覚センサ (画像元)
https://www.youtube.com/watch?v=USp4H2MVRQs&feature=youtu.be
実装上の留意点が幾つかあります:
- 現状では wdf-6m200-3 (廃番,USB-Serial 接続) にのみ対応しています.同社の新型製品 (USB-Serial ではない) ではドライバの都合でそのままでは本機能はおそらくつかえません.
- 本機能の適用には QNX ライセンスに基づいたコントローラボックス上のソフトウェアの改変が必要なのと,ノウハウが必要なのとで,適用方法は公開しておりません.
FAQs:
- Q: F/T センサを追加で装着しても,装着前に使っていたグリッパは使えますか? A: はい,問題ありません.気をつけるべきは,キネマティクスが変わるのでロボットの3次元モデルをセンサを含めるよう更新が必要となります.また,センサ装着,グリッパの再装着等の据付作業はお客様御自身で行って頂くこととなります.
- Q: 配線変更やケーブル追加,その他電子機器の追加設置は必要になりますか? A: はい,F/T センサとその出力をを処理するコンピュータとの通信のために必要です. なお本ページ中で取り上げている JR3・Dynpick は USB/RS232C を使います.
- Q: F/T センサを Ubuntu に接続してインピーダンス制御機能を利用できますか? A: Dynpick の場合,はい,ただし得られる結果は要件により異なります.Dynpick には ROS で使える Ubuntu 用デバイスドライバパッケージが無償入手でき,デバイスを繋げばすぐ使いはじめることが出来るのですが,Ubuntu は基本的にはリアルタイム性を担保しないため,やや限定的となります.本ページでご紹介しているのは F/T センサを QNX に接続し,そのリアルタイム機能を活かす方法です.インストール方法が複雑となります.
- Q: インピーダンス制御機能の導入費用は? A: TORK サポート窓口までお問合せ下さい.
なお本件に関わるソースコードの公開は,株式会社豊田中央研究所様の御厚意により実現しています.
*1 米国メーカ JR3 Inc. は今日現在存続しています.連絡したら返信も返ってきました.
Earlier this year we mentioned that for Kawada’s industrial dual-arm robot NEXTAGE Open (/ Hironx), a force-torque sensor “JR3” can be integrated into its real-time control loop. Now that then-sales agency discontinued import so that JR3 becomes not easily available for Japanese users, another sensor support has been desired. Recently we’ve added Wacohtech’s Dynpick to the lineup.
“Dynpick” Miniature capacitive 6-axis force sensor (image source)
https://www.youtube.com/watch?v=USp4H2MVRQs&feature=youtu.be
To implement the necessary changes, a few thiings to be noted:
- Currently only the product wdf-6m200-3 is tested (discontinued,USB-Serial), and other newer type of Dynpick products shouldn’t work as it is, since some tweaks are most likely needed for them to work on QNX.
- Because the work requires modification on the software on ControllerBox (QNX), we have no plan so far to write publicly about how to apply the change.
FAQs:
- Q: Can the same gripper be used after F/T sensor attached? A: Yes, no problem. Robot’s kinematics changes, however, so updating robot’s 3D model will be necessary. Attaching the F/T sensor and re-attach the gripper is your responsibility.
- Q: Is adding/changing cabling or electronics to provide communication between sensor and the robot necessary? A: Yes, for the communication between the F/T sensors and the computer. JR3 and Dynpick are USB/RS232C.
- Q: Can the F/T sensor be connected to Ubuntu for impedance controller feature? A: Depending on the requirement of your application. Dynpick has a device driver package for ROS that works on Ubuntu This works out-of-the-box, but Ubuntu is not a real-time OS perse by default. The solution explained on this page is to connect the sensor to QNX to take advantage of its real-time capability. Installation isn’t easy as mentioned earlier.
- Q: How much is the cost to activate the impedance control? A: Please contact us.
The opensource contribution of this project was realized thanks to Toyota Central R&D Labs., Inc..
Update; Programming for NEXTAGE Open via MoveIt! motion plannerアップデート) ROS の経路計画用ライブラリ MoveIt! 経由での NEXTAGE Open のプログラミング
ロボットを扱う上で必要な機能がたくさん収められている ROS の中でも,経路計画用ライブラリ MoveIt! は代表的なツールの1つです.
腕をはじめとして,ロボットの体の部位は我々人間のそれと同じように,複数の関節からなりますが,それらを直感的に操作できるようにするためのプログラミング・インタフェイスを備えています.
その機能は当社がソフトウェアのサポートを行っているカワダロボティクス社製双腕ロボット NEXTAGE Open でもフルに活用可能です (既に MoveIt! を用いて NEXTAGE Open を動作させているユーザ様事例がこのページに掲載しております).
MoveIt! を利用してプログラミングを行う際のサンプルの拡充も続けてまいります.既存のユーザ様からよくいただく質問として,”hrpsys ( / OpenRTM) 経由でのプログラミング方法はわかったが,ROS でプログラムを書く方法がわからない” というものがあります.これに応えるために ROS_Client と呼ばれる NEXTAGE Open 専用の ROS クライアントクラスを用意しました.使い方はこちらの wiki をご覧ください.ご不明点などは github 上で聞いていただくと,当社かユーザグループのどなたか 😉 から返信が入ると思います.
また,MoveIt! 自体のメンテナンスにも TORK は積極的に参加しており,最新の機能やバグフィックスの利用を開発者ができるだけ手軽に利用することができるよう貢献しています.

(MoveIt! が NEXTAGE Open の左腕の関節グループを認識するように設定を行っている所.難しい設定も GUI 上で行うことができます.)
MoveIt! not just comes with state-of-art algorithms but also a programming interface that you can program complicated manipulation tasks in an intuitive fashion.
It’s not an exception with Kawada Robotics’ dual-arm NEXTAGE Open robot, which we provide professional, full-fledged software support for. We’ve been maintaining so-called ROS_Client, a designated ROS programming interface for NEXTAGE Open in Python, to utilize MoveIt!’s simple interface while trying to minimize users’ effort to learn new stuff like MoveIt! as much as possible. If you’re a programmer for NEXTAGE Open and like to write your code in Python and ROS, please have a look at this wiki page. You’re always welcomed for questions and discussions at its github issue page where some of us or developers on the internet land 😉 will respond fairly quickly.
TORK also contributes to maintaining MoveIt! itself, to make the new feature and bugfixes available in the easiest way for all the users in the world.
(MoveIt! configuration going on for the NEXTAGE Open; grouping joints as “left-arm”. Complicated tasks regarding manipulation becomes handy too with GUI tools on MoveIt!.
Happy Mother’s Day 2016 for the robotics2016 母の日に贈る! ロボティクス便利ツール
Happy Mother’s Day (一日遅れ)!
さて,お母さんに限らずロボティクスの作業において,本質的でない作業はできるだけ減らしたいもの.新しいコンピュータを扱う際に必ず発生するインストール作業はそのうちの最たるものの一つではないかと思います.
ROS の Linux コンピュータへのインストールは,チュートリアルに従いコマンドをたった数回実行すれば終了するので,これがあまり面倒だという意識はないかも知れません.それにしても,その数回のコマンドの実行すら望ましくないケースがあります.コマンドの打ち間違いや,元来面倒くさがりとされるエンジニアのエゴだとか.
コマンド1行でインストール完了するスクリプトファイルを用意しました.
元々は,韓国の ROS ユーザグループ OROCA がコマンド2行でインストールできるように作成したものを,TORK が改良に貢献したものです.
例えば次のコマンドによってお手元の Ubuntu Linux コンピュータ上で1行インストーラを実行すると,ROS Indigo の desktop-full (基本パッケージ全部入りの贅沢版とでも言えば良いでしょうか) のバイナリがインストールされ,かつご自身で ROS の作業する場合に必要なフォルダ “Catkin Workspace” まで生成され,すぐにご自身の開発作業に入ることができます.
wget https://raw.githubusercontent.com/oroca/oroca-ros-pkg/master/ros_install.sh && chmod 755 ./ros_install.sh && ./ros_install.sh catkin_ws_tork indigo
この1行インストーラは現状では ROS Indigo の他,Jade,2016年版の Kinetic Kame にも対応しています.
問題報告等は OROCA プロジェクトの github ページに是非御連絡下さい.
Happy Mother’s Day!
To help busy mothers in robotics, TORK made a script to install ROS with just a single line of command (well, this helps not just moms).
Installing ROS on Linux computers is already made simple as only a few lines of commands. However, our experience tells that it’s sometimes not ideal, e.g. when a command skipped by mistake, typos happen. Besides those, engineers are inherently lazy.
Here’s a ROS single-line installer script. It is originally made by a ROS user group in Korea “OROCA” and TORK contributed to adding features.
For example, by running the following single command on your Ubuntu Linux machine, ROS Indigo desktop-full will be installed, along with your source workspace called “Catkin Workspace” and you can start your own work from the next command.
wget https://raw.githubusercontent.com/oroca/oroca-ros-pkg/master/ros_install.sh && chmod 755 ./ros_install.sh && ./ros_install.sh catkin_ws_tork indigo
It’s capable of ROS Jade and the 2016 version called Kinetic Kame, in addition to ROS Indigo.
Report and discussion is encouraged at OROCA project github page.
GSoC 2016 is open for students submissionGSoC 2016 学生さんの募集〆切が迫っています
Google のオープンソースソフトウェア (OSS) 支援企画 Google Summer of Code への学生さんの応募が始まっています.
昨年は TORK もメンターとして参加しました (OSRF 枠) が,12年目となる2016年の今年は,ロボティクスに関連が深いプロジェクト (ROS Industrial, MRTP, OSRF, OpenCV, Open Detection, Robocomp 等) がいつもより多いようにも感じます.当社理事も務める東京大学岡田准教授らの JSK (情報システム工学) 研究室 プロジェクトもホストとして採択され,hrpsys コントローラ等のプロジェクトで学生さんを募集しています.
学生さんからの応募が米西海岸時間で3月25日 (金) いっぱいと迫っていますので,学生さんで夏の間に腕試しされたい方や,OSS に貢献したい (しかも有給で) 方はお急ぎ下さい!
Google’s (awesome) opensource software (OSS) advocate program “Google Summer of Code” (GSoC) is fast accepting applications from the students.
While last year we, TORK, participated too as a mentor (in OSRF umbrella), this year’s round in 2016 we’re glad to see probably more projects than before that robotics has deep relation to, such as MRTP, OpenCV, Open Detection, OSRF and ROS-Industrial, Robocomp to name a few. We’re also more than happy to see projects from JSK lab at University of Tokyo (where our founder assoc. professor Kei Okada is affiliated) are accepted for hrpsys humanoid controller’s development.
List of all GSoC mentor organizations
List of GSoC mentor organizations that are related to robotics (not limited to them, since robotics takes advantage of all kinds of software!):
Students are encouraged to follow the guideline to submit applications by the end of March 25th (it’s this Friday!).
Update on Rethink Video Challenge 2015Rethink Video Challenge 2015 で準決勝進出
Rethink Robotics 社による双腕ロボット Baxter を用いた動画コンテスト rethink robotics video challenge が行われました.Baxter の活用方法を動画で提案し,審査の結果1位となった提案者にはロボット一台が無償提供されるというものです.
TORK でも Baxter を題材としてワークショップを開催してきました (ROS 基礎・産業双腕 Baxter 編) が,安全性,ROS を使ったプログラミングのしやすさ等とても良いロボットであると思います.今年9月には一般向けワークショップで80名様の前で無償開催しました.
上述のコンテストには TORK も参加しました.惜しくも準決勝敗退となりましたが,決勝進出チームの動画を見ると,バラエティ豊かですね..これまで研究用途は勿論のこと,学部生や高校生の学習,コミュニティ活動にも提案が出ています.動画コンテンツとしての作り込みも楽しいですし,是非上記リンクからご覧になってみて下さい.
Baxter や ROS の活用にご興味おありであれば,当社のワークショップ (日本バイナリー株式会社様協賛) にご参加下さい.
TORK advanced to the semi-final round at rethink robotics video challenge 2015.
Baxter is a robot with novice ideas implemented and we’re a big fan of its versatility! Because we really want to see more Baxter users in Japan, we’ve been holding workshop using Baxter since 2014. Also, we held a voluntary workshop with 80 participants a few months ago at RSJ conference in Tokyo to reach out to the general public.
This time we participated the challenge, advanced to the semi-final round (hooray!) without making to the final though.
Looking at the finalists submission, we can see a variety of ideas ranging from research development, undergrad coursework and to even STEM education and community activities. And the quality of videos! I suggest you to watch them, now. And when you get interested in the robot or utilizing ROS or in any way, we’re holding workshop using Baxter so please don’t hesitate to contact us.
Celebrating ROS for turning 8-year old at TORKROS 8周年,TORK も貢献しました
OSRF made a blog post to celebrate ROS turning 8-year!
ROS が生まれてから11月で8周年ということで,メッセージとモンタージュビデオが公開されました.
ROS 8 Year Montage from OSRF on Vimeo.
They also compiled a “montage video” with video pieces from the community of “ROS-based” robots. Last time montage was made was in 2012 upon 5-year mark. Looking back at it together, we’ve added a bunch of limb-based, flying, and outdoor robots in environments with greater severity.
Since the launch in 2013, we, TORK, has been centering around contribution cycle to ROS. In our first appearance in ROS montage, robots we support such as NEXTAGE Open and Denso ROS packages are covered.
ROS で動作するロボットを集めたモンタージュビデオが作成されるのは,5周年時だった2012年以来です.印象ですが,移動台車ロボットが多かった5周年時にくらべ,アーム型,空飛ぶ型,屋外も厭わない型など,ROS の用途が一層増えていそうですね.
TORK は2013年発足以来 ROS のヘビーコントリビュータとして活動してきましたが,ROS モンタージュビデオには今回が初の登場となります.NEXTAGE Open サポート,Denso ROS サポートの成果が登場しています.
[ユーザ事例] 双腕ロボットでの Impedance 制御
NEXTAGE Open (Hironx) を利用されているユーザ様事例を紹介します.
産業技術総合研究所マニピュレーション研究グループ様のロボットは,手先にJR3社製の6軸力センサ を取り付けており,センサが計測する外力に応じて手先の位置姿勢を制御する Impedance 制御を実現されています.この Impedance制御の設定,制御方法はチュートリアルとして公開していますので,力センサ付きの NEXTAGE Open をお持ちの方は是非お試し下さい.
Denso robot in ROS-Industrial 3-year montageROS-Industrial 3周年ビデオに当社メンテナンスのデンソー様ロボットのパッケージが登場
ROS を産業用自動化に活用する取組みである ROS-Industrial プロジェクトの3周年ビデオに,TORK が関わるデンソー様のロボットの ROS パッケージも紹介頂きました.
#動画登場は一瞬です.お見逃しなく!
ROS-Industrial は日経ロボティクス誌10月号でも紹介させて頂いていますが,ROS に産業用途の機能を追加したフレームワークや共用可能なツールを開発・公開しています.今回のデンソー様の例では,直交座標系でのグラフィカルなティーチングを可能にするツール Cartesian Planner を利用し,プログラミング言語不要での動作計画の可能性を示しました.
当社もメンテナンスに積極的に協力しているデンソー ROS パッケージはオープンソースで公開中で,ユーザ様からの貢献もいただきつつ継続的に改良されています.こちらからご覧になりぜひ試用してみて下さい.
Denso ROS package, an industrial robot software we’ve been actively involved in maintenance, appears in 3-year montage video of ROS-Industrial project.
As we’ve post an introductory article in Nikkei Robotics magazine in Japan, ROS-Industrial project develops framework and tools that utilizes ROS for automation purpose and make them publicly available. With Denso package, we’ve utilized Cartesian Planner tool that allows users to program the robot’s movement in cartesian space in a graphical manner (without involving computer programming).
Denso ROS package has been actively maintained with contributions from user’s land. Please try from here and let us hear about your experience with it.
2015年11月 企業向け ROS Workshop 開催決定ROS Workshop for enterprises in November, 2015
企業向け ROS ワークショップシリーズ,2015年11月の急遽開催決定しました.以下の各ワークショップのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.
“ワークショップ” とは別に,理論や現状などを知りたいという方々向けの所謂”セミナー”の開催も検討しています.ご意見頂ければ幸いです.
info[a-t]opensource-robotics.tokyo.jp
ROS hands-on workshop courses will be held in November 2015 by TORK in Tokyo, Japan. Any inquiry can be posted at info[a-t]opensource-robotics.tokyo.jp
Laser 関連ツールを ROS に再リリースLaser scan tools for ROS rejuvenated (since Fuerte)
Laser センサデータを利用したツール群 scan_tools を ROS Indigo, Jade にリリースしました.laser_scan_matcher や polar_scan_matcher パッケージを利用すると,Laser データのみから現在位置を推定することができ,また単独で Odometry として利用することも可能です.
これは TORK が作成したわけではなく,数年前からソースコードは存在していたものを,今回我々が整理してバイナリ化しました.
参考:ROS パッケージを作った Ivan Dryanovski の公開当時の告知
デモ動画
We just released ROS tools for handling laser scan data “scan_tools” into ROS Indigo, Jade. laser_scan_matcher or polar_scan_matcher packages enable 2D pose estimation solely based on the laser scan input. It can be also used as odometry without relying on other sensor data correction. On Ubuntu linux you can install via apt command.
Ok, actually, we didn’t build anything. We just sorted out and “re-published” the source code so that people can install by a single command. Its source code was made by CCNY Robotics Lab.
Ref. Announcement in 2010 by Ivan Dryanovski at ros-users forum
Demo video:
Ubuntu で ROS を使うと,多くのパッケージのインストールは,スマートフォンでのアプリのインストールがボタン一つで済むのと同じように,コマンド一回の実行だけでインストール完了し,即使えるようになります.ROS Indigo では今日現在 2,034 個のパッケージがコマンド一回でダウンロード・インストールできるようになっています (Build Status ページ参照).これを可能にするのには幾つもの要素が絡んでいます:
- Ubuntu が apt という使いやすいパッケージ管理システムを持っているから
- ROS の管理元 OSRF が apt でパッケージをインストールできるための仕組みを ROS 向けに構築し,外部の有志メンバーを交えほぼ24時間体制で維持しているから
- 各パッケージの作成者/管理者がルールに従いリリースしているから
特に各パッケージの管理者の貢献は見逃せません.今日時点で約200人の管理者が継続的なパッケージのリリースを行っており,上記のように膨大な数のパッケージが利用可能になっています.
ただ,数年も経つと開発者・管理者が他のプロジェクトに移るなどにより,メンテナンスが放置されるパッケージも出てくるのは仕方ないことです (現在使ってないのにメンテを続けるアツいメンテナも沢山いるので念の為!).しかしながら多くの場合では,少し手を入れてやることで最新バージョンの ROS プラットフォームとの整合をすぐに取ることができます.上記の scan_tools がまさにそうです.今後も TORK は埋もれていたソフトウェアが,また再び世界中の多くのユーザに使われるようになるためのお手伝いをしていきます.
(11/18/2015 更新) この度 ROS Indigo, Jade のパッケージリストが更新され,上記以外にも,これまで放っておかれた以下のパッケージ群が,今回我々が手伝わせて頂くことで入手可能になったようです.
Using Ubuntu linux, you have so many ROS packages readily available just 1-command away, much like apps on your smart phones. As of today on ROS Indigo 2,034 packages are awaiting in the cloud (If you’re curious how the sea of cloud actually looks like, sneak peak from Build Status). To make this wonder happen, there are a few things:
- apt package management system on Ubuntu
- OSRF, management team of ROS maintains the infrastructure that builds, tests, and distributes ROS packages that the developers of each package submit. Involving volunteers, it’s eye-maintained almost 24/7
- Each package’s developers and maintainers are diligently conforming to the rule and vigorously submitting the updates
What makes ROS as sized is this many package maintainers; today more than 200 persons have made a release.
A dilemma of a huge project to last long, like ROS with longer than 6 years, may be that some maintainers may go away as they move on to new projects (while some remain although they are not actively using the packages they take care of!). But most of the times with a minimal care, the packages can be revitalized and made compatible with the latest ROS platform. This is what TORK did for the aforementioned scan_tools package suite and we’ll continue this kind of effort to help opensource community shine even more.
(Update 11/18/2015) The list of available packages in ROS Indigo, Jade is updated today, and some packages other than aforementioned scan_tools that were almost abandoned for newer ROS versions are now back available. TORK was happilly involved in this process.
[Info wanted] LabView – ROSLabView と ROS の連携例
It’s been awhile since I last time heard of National Instruments’ LabView and ROS integration. Looks like there’s a good progress made by Tufts — ROSforLabview enables LabView to connect via TCP to ROS master that runs on some other host than where LabView runs. It’s also referenced in National Instruments’ WEB site. A dual-arm industrial robot Baxter is demonstrated.
Whether ROS run on Microsoft Windows has been one of the most common questions about ROS among industry users. ROSforLabview seems like a good option for those.
計測機器や手軽なプログラミングツールとして米・National Instruments 社の LabView をお使いの方も多いのではないかと思います.LabView と ROS の連携について少し調べた所,次のような取組が行われているようです:
- 米タフツ大学がメンテナンスする ROSforLabview は,どこかで起動している ros master に TCP 接続さえできれば,Win マシン上の LabView と連携できるようです.また LabView 開発・販売元の National Instruments 社 WEB サイトにも事例として載っており,ROS で動作する双腕ロボット Baxter に対し LabView から指示を与える動画が観られます.
- `labview-ros` パッケージ:カナダのコンサル企業が作成したもの.2013年以降メンテが止まっており,最新の ROS Indigo とは連携が難しい様子です
Baxter 連携プログラムは,あまり告知されていないので存じませんでしたが,謳われている通り動画のとおり Windows (/Mac) 上では LabView のみ動作させ,ROS はどこか別なホストで挙動していても接続できる挙動をするのであれば有用そうですね.
日本にも LabView と ROS を連携しておられるユーザ様はいらっしゃるのでしょうか?
Kawada’s Hiro & NEXTAGE Open Software now available in ROS Indigo (Long-Term Support)カワダロボティクス社 Hiro & NEXTAGE Open のソフトウェアが ROS Indigo (Long-Term Support) に対応
Software of Kawada’s Hironx or NEXTAGE Open, both of which we’re providing maintenance service for its ROS-based opensource controller, is now available on Ubuntu 14.04 and ROS Indigo. At the same time, support for Ubuntu 12.04 and ROS Hydro has reached the end-of-life.
Please follow the link for the detail including upgrade instruction.
ROS Indigo is proud of approx. 2,000 packages, much added since its predecessor Hydro (with 1,700), and it’s the first LTS (Long-Term Support) in ROS and claimed to last until 2019.
We know that Indigo has been around for longer than an year already but you know, it’ll keep rocking longer than any other versions of ROS has ever done!
当社がサポートを提供しておりますカワダロボティクス社の Hironx 或いは NEXTAGE Open 両ロボット向けの ROS 対応した制御ソフトウェアがこの度 Ubuntu 14.04・ROS Indigo に対応しました.同時に Ubuntu 12.04・ROS Hydro のサポートは停止しました.
詳細はこちらのリンクをご覧下さり,アップグレードが必要な方は同リンク先の手順に従って実施下さい.
ROS Indigo は約2,000パッケージ利用可能で,これは一つ前のバージョンである Hydro の1,700を大きく上回ります.Indigo はまた ROS の8つ目のバージョンにして初めて LTS (Long-Term Support) として,2019年まで継続してサポートされることになっています.
確かに Indigo は1年以上リリース後経過していますが,まあ,あと4年も使えるんですから,気長に行きましょう!

Logo: ROS Indigo Igloo (http://www.ros.org/news/2014/04/22/indigoigloo_600.png)
Update on Nikkei Robotics monthly magazine日経ロボティクス誌の ROS 連載,第5回まで終了しました
As we made a notice before, Isaac has been working with Nikkei (a leading business news distributor in Japan that recently acquired Financial Times) on article series about ROS on Nikkei Robotics monthly magazine. Lately some customers even take the magazine out from the bag and ask about the articles. What a bliss! We’re glad to see more development is happening in the industry and if we are becoming the integral part of it by providing assistance about opensource robotics technology.
The back number of the magazines is available through their web site.
Article titles (English translation by TORK):
- Ep.1 ROS: de facto standard tool for robotics software development, Beyond the research labs further on industrial
- Ep.2 Using ROS on Fetch; SLAM, IK are off the shelf
- Ep.3 ROS-I: ROS’ industrial extension. Community and application. Universal pendant to be developed
- Activities in North American and European consortia. Type of membership and benefit
- Ongoing FTPs and how it works
- industrial_core framework overview
- Available robot drivers
- Possible contribution from industrial players in Asian region
- Ep.4 ROS on ARM: Going Beyond x86 to Embedded Systems Backed Up By Qualcomm
- Ep.5 ROS2.0: Communication Infrastructure Basis on DDS for Real-time Capability and Stability
(Update November 30, 2015) Episode 5 is out!
以前告知しました通り,日経ロボティクス誌で “ROS とは何か” という連載を理事斉藤がさせて頂いています.最近は打ち合わせ時にお客様が同誌を持って来られて,記事で触れた箇所についてさらに質問頂くようなことも出てまいりました.ROS を使ってシステム構築がより進むための情報が少しでもご提供できていれば幸いです.
なお同誌は年間購読のみ可能のようですが,バックナンバーであれば単月で入手可能となったようで,日経 BP 社 WEB サイトからお買い求めできるようです.
ROS の連載タイトル:
- 第1回 ロボット用ソフトのデファクトになったROS 研究用から脱し,産業用ロボにも進出
- 第2回 Fetch 社のロボットで ROS を試す SLAM や逆運動学も手軽に利用可能
- 第3回 ROS を産業用ロボット向けに拡張した「ROS-I」 ベンダー共通の汎用ティーチングペンダントも開発
- 第4回 ARM 版の ROS は Qualcomm 社が強力に推進 x86 から脱却し,組み込み分野に広がる契機に
- 第5回 ROS の次世代版は通信基盤がより頑健な DDS に 通信のリアルタイム性や信頼性を向上
(Update November 30, 2015) 第5回が発刊されました!
Thank you for coming to our ROS-Baxter Workshop at RSJ 2015 annual meetingROS-Baxter ワークショップご来場ありがとうございました (RSJ 学術講演会2015)
As we’ve made a small announcement, ROS-Baxter workshop at RSJ annual meeting 2015 took place. We failed to anticipate the participation by 70+ busy personnels but thank you very much for the interest and the attendance!
For those who requested simulation package but didn’t provide email address, please contact info[a-t]opensource-robotics.tokyo.jp.
Some public conversation channels:
日本ロボット学会学術講演会2015内で開催したオープンフォーラムにお越しいただいた方々には御礼申し上げます.当初定員を15としていたのが,最終的に用意した70脚が埋まる盛況を頂きましたため,一部予定したプログラムが実施できず期待していた方にはご不便をおかけしましたが,おかげ様で日本の学術界における ROS,Baxter への関心の高さを窺い知ることが出来ました.
なお,会の中でお伝えしましたシミュレータ配布に関し,希望を頂きながら Email アドレスを記載されてない方々が散見されますので,info[a-t]opensource-robotics.tokyo.jp までご連絡下さい.
その他,ご紹介したオープンソースコミュニティの情報を次の通りお伝えいたします:


TORK at Toyota HSR (Personal Robot) Hackathon 2015TORK は今年も HSR ハッカソンをサポートします!
It’s been almost an year since TORK worked with Toyota Motors Corporation to co-host their inaugural hackathon for their HSR personal robot. We’re pleased to work with the company and the new version of their HSR robot again from August 31th through Septermber 2th at Megaweb show room in Tokyo (link). Selected participants already have an access to the robot’s Gazebo simulation packages and they should be getting ready, so are we!
The competition sight is right in the middle of Toyota’s showroom in Odaiba water front, and will be open to public. Come see the moment!
昨年度大好評をえた第一回ハッカソンに引き続き8月31日から9月2日までお台場の Megaweb で開催されるトヨタ自動車様の「HSR ハッカソン2015」をお手伝いさせて頂いています.すでに参加チームには Gazebo シミュレータが事前配布されているということで, 各チームの準備状況が気になりますね.TORK チームも連日使い込んでいます.またロボットは昨年度のものからバージョンアップした新型 HSR.
なお当日会場は一般公開しているのでご都合宜しい方は応援に来られてはいかがでしょうか.
楽しみです!
HSR on Gazebo simulator and ROS RViz visualizer.
ROS-Baxter workshop at 33-rd Annual Conference of the RSJ 2015 (Sep 4)2015年ロボット学会学術講演会内で双腕ロボットのワークショップ開催 (9月4日)
Workshop details
- Purpose: Brief introductory course for the Rethink Robotics’s Baxter Research Robot (for research), which came out in 2012 targeting mid-small class businesses while achieving low-price and revolutionary safety. Participants will experience the state-of-the-art mechanism and operational interface of the robot, as well as the high-end features such as motion planning and perception based on software programming gateway called ROS, a defacto standard framework for research-oriented robots.
- Title: ROS Basic Workshop w/industrial dual-arm Baxter robot
- Host: TORK (Tokyo Opensource Robotics Kyokai Association)
- Assent: Nihon Binary Co., Ltd. (official supplier of this robot in Japan)
- Date: See “Schedule” section at the bottom of this page
- Venue: 1st building 1F, Centennial hall at Tokyo Denki University
- Fee: Free
- Workshop language: Japanese (sorry! But if there’s an interest for English, please contact us. We’ve managed sessions where non-Japanese speakers were present)
- Curriculum
- Introduction to Baxter robot & ROS
- Motion planning by MoveIt!
- Perception and action planning
- Gazebo simulation usage with Baxter
- Items to bring
- Laptop computer
- NOT required. Limited number of desktop machines are available. In fact pair-work if you’re coming with your colleague is recommended for better learning.
- Intel i5 or above, RAM 4G or above, storage 7G or above, internet connectivity (ethernet or wifi)
- We ask you to disable any intra-organizational network setting (e.g. Proxy) and make sure your machine can connect to the internet without them. These things are known to cause issues that might end up affect the workshop progress.
- Ubuntu 14.04・ROS Indigo installed. See installation tutorial. (Hydro or any other ROS distro is not recommended in our workshop.
- Laptop computer
Resource
- We, TORK, offers workshop for ROS, which is a crucial part of utilizing BRR. Go to this page for more info.
当社はこれまでオープンソースソフトウェアの ROS を用いてロボットを扱いたい,という様々な需要に応えるべく,複数のタイプのワークショップを開催してきました.産業用双腕ロボット Baxter を用いたワークショップは,日本代理店の日本バイナリー社様のご協賛の下,同社オフィスでこれまで行ってまいりましたが,今回は9月の日本ロボット学会学術講演会内で開催する運びとなりました.
今回は,学会内ということもあり,機能性のご紹介を差し上げる軽めの場となっております.
Baxter の日本公式販売代理店の日本バイナリー様ならびに,製造元である米・Rethink Robotics 社様のご厚意により,通常ロボットを購入しないと入手できない Baxter Research Robot のシミュレータの入手権を,参加頂いた方にはお渡しします.
事前申込不要 (参加者が多い場合の不都合はご容赦下さい)
- 日時:9/4/2015 (金) 12:30-14:30
- 場所:東京電機大学 東京千住キャンパス1号館1階100周年ホール(中) (ロボット学会学術講演会内)
- 協賛:日本バイナリー株式会社
- 費用:無償
- 対象
- Baxter Robot の特徴について知りたい方
- ROS を用いた Baxter Research Robot の可能性にご興味がおありの方
- Baxter Research Robot ユーザ
- 内容 (予定)
- Baxter ロボット/ROS 概要の紹介
- ロボットプログラミング例・ハンズオン
- MoveIt! 動作計画プログラミング
- 視覚認識と行動生成プログラミング
- Gazebo による Baxter シミュレータ利用法
- Baxter Research Robot ユーザ様によるライト・トーク (あれば)
- ご持参頂きたい物
- 特になし
- Ubuntu 14.04 + ROS Indigo インストール済のコンピュータご持参の方は,Baxter に接続して動作を体験頂けます (virtual machine は一部のツールの動作が不安定のため推奨しません)

お問合せ:info[a t]opensource-robotics.tokyo.jp
当社が行っている通常版 ROS-Baxter のワークショップページもご参考までにご覧下さい.
ROS Workshop seats available (introductory and intermediate-manipulation) (Jul, 2015)ROS Workshop 初級・中級マニピュレーション編が急遽開催決定 (2015年7月)
企業向け ROS ワークショップシリーズ,2015年7月28水,29木に急遽開催を決定しました (もう来週ですね)
各セミナーのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.
“ワークショップ” とは別に,理論や現状などを知りたいという方々向けの所謂”セミナー”の開催も検討しています.ご意見頂ければ幸いです.info[a-t]opensource-robotics.tokyo.jp
A few ROS Workshop courses will be held in next week by TORK in Tokyo, Japan. Any inquiry is appreciated at info[a-t]opensource-robotics.tokyo.jp
TORK on newly published Nikkei Robotics magazines日経ロボティクス誌で ROS 連載させて頂いています
Nikkei BP, a leading business newspaper and magazine media company, celebrated its inaugural publishment of monthly magazine “Nikkei Robotics” in July 2015. Our co-founder Isaac contributes series of articles about ROS (Robot Operating System).
With a rising need and interest toward robotics solution in global economy, we’ve seen recently the amount of technical information about opensource robotics in Japanese has increased a great bit. With the magazine articles this time, we aim to inrtoduce the status quo of what’s going on in opensource robotics and how big the impact the opensource technology is giving to the robotics development, especially in the large scale projects, so that corporate readers can hopefully get some idea of how they can integrate opensource into their robotics product development.
Although the article is only in Japanese as far as we know, we appreciate any feedback, requests about this (info[a–t]opensource-robotics.tokyo.jp). You can make a purchase request from Nikkei BP’s official web site from the link above.
日経 BP 社より今月創刊された月刊誌”日経ロボティクス“の中で,理事・斉藤が ROS (Robot Operating System) を紹介する記事を書かせて頂いています.
昨今のロボットブームのおかげもあってか,オープンソースロボティクスの日本語の情報,とりわけまず使ってみるといった技術情報が飛躍的に充実したように感じます.今回の記事では,技術的な話も抑えつつ,日本・世界の企業や大学等様々な場所で起きているオープンソースロボティクス活動のインパクトを紹介し,企業内プロジェクトへのオープンソースロボティクス採用検討のために有益となる情報を提供することを目指しています.
ご感想や今後の記事への御要望等をお聞かせ願えれば幸いです (info[a–t]opensource-robotics.tokyo.jp).購入ご希望等日経ロボティクス誌に関するお問合せは上記の同誌リンクから行って下さるようお願い致します.
講演のお知らせ;ロボット工学セミナー第94回 ロボット用オープンソースソフトウェアとその実用例 (2015/09/11)
(社) 日本ロボット学会主催の標題のセミナーに,当協会理事の東京大学・岡田准教授と,斉藤が登壇します.以下,セミナー WEB サイト[日本ロボット学会トップページへ移動します]から一部転載させて頂きます.事前申込により遠隔受講も可能とのことです.
- 開催日:2015年9月11日(金)9:50~16:40(開場9:20)
- 遠隔セミナー:本セミナーの有料ネット配信を行います.参加者募集開始は8月上旬の予定です.
- 開催地:中央大学 後楽園キャンパス 5号館5134室 (東京都文京区春日1-13-27)
- 口上:近年ロボット向けオープンソースソフトウェアの利用が拡大しつつあり,代表的なものに海外にて急速にユーザを増やしているROS などがあります.本セミナーでは,ロボット向けオープンソースソフトウェアの開発やその応用において第一線で活用されている方々を講師にお招きし,ソフトウエアの概要から製品に活用する上での具体的な運用方法まで実例を交えてわかりやすく解説いただきます.
- 講演者 (一部)
- 10:00-11:00 第1話 ロボット研究用オープンソースソフトウェアの動向と今後の可能性 東京大学 岡田慧
- 11:10-12:10 第2話 ROSの活用による屋外の歩行者空間に適応した自律移動ロボットの開発 千葉工業大学 原 祥尭
- 13:10-14:10 第3話 ヒト型ロボット研究プラットフォームの開発 カワダロボティクス(株) 長嶋 功一
- 14:20-15:20 第4話 ロボット開発用オープンソースソフトウェアの企業活用支援と今後の展望 (一社) 東京オープンソースロボティクス協会 齋藤功
- 15:30-16:30 第5話 トヨタパートナーロボットの取り組み トヨタ自動車(株) 山内 実
お申込は日本ロボット学会の WEB サイトから可能となっています (リンク)[日本ロボット学会トップページへ移動します].
Opensource を積極的に活用してビジネスに繋げている・成果を挙げている他の講演者様をはじめとして,交流できることを楽しみにしております.
ROS support period until 20202020年までの ROS のバージョンごとのサポート期間
ROS の利用を検討されている企業の方が一様に気にされるのが,サポート期間です.
というのも,つい最近まで ROS は1年間に2度も新バージョンをリリースしていました.開発者からすると,安定性の不透明な新バージョンにしょっちゅう更新するわけにはいかない,というのが不安の第一の理由だと思います.また,遅ればせながらやっとバージョンを更新して慣れてきたばかりなのにもう次のバージョンが出て,世間の話題はすっかり新バージョンに移ってしまった,という精神的フラストレーションは意外に無視できないのではないでしょうか.このような不安は企業/大学その他,どこの方にも共通ですね.
これら多くの声を元に,2014年の ROS Indigo からは LTS (Long Term Support) という考えが導入されました.
- ROS 初の LTS である Indigo は,2019年までサポートされることが発表されています (Ubuntu 14.04 のサポート期間に準ずる)
- 次の ROS LTS は2016年リリース予定の “Kinetic Kame” (“運動的な亀”?まあ,素直にキネティック亀と呼びましょうか) で,同様に2021年まで.Ubuntu は16.04中心で,14.04は未対応と思われる
- その次は2018年の M-Turtle (名称未定) が2023年までサポートされると予想されます
では,Indigo が2019年までサポートされるのであれば,今から4年間も同一の Ubuntu・ROS バージョンを使い続けられるのかというと,実際は時が経つにつれて機能性等不満が出てくる場合もあると思われるため,用途によって様子見になるのではないでしょうか.特に,LTS は2年間隔でリリースされることになっているようなので,Indigo の次の LTS であるキネティック亀に,2019年を待たずに乗り換えるというケースは考えられます.
それにしても,日本のロボティクス的には大きなマイルストーンでありそうな2020年には,キネ亀あるいは M-Turtle のいづれかを使うことになるのかも知れないですね.
M で始まるカメといえば,国民的アイドルの緑色のお方でしょうか!

“ROS Midorigame Turtle” 実現が待ち遠しいですね!
参考:ROS リリースタイムライン http://wiki.ros.org/Distributions/Timeline
我々がメンテナンスに関わっている NEXTAGE OPEN のオープンソースソフトは,これに合わせて,今後 Indigo を LTS としてはどうか,という議論になっています.ご意見を是非メイリングリスト等でお聞かせ下さい.
What industry users have asked us about ROS particularly is how long certain ROS version (called “distro”) will be supported.
That’s no wonder because ROS used to make 2 releases within an year until recently. Apparently developers worry the unstability that new version of any kind of software induces initially. In addition, there’s an implicit anxiety where you for example finally updated to the latest version but then even newer version is just released and you’re already out of sync from the community. This is common for wherever you work, industry, academia or hobby etc.
Based on the demand ROS implemented LTS (Long Term Support) concept starting from Indigo in 2014. The future LTS period will be:
- Indigo, ROS’ inaugural LTS release, will be supported until 2019
- Next up is “Kinetic Kame” that’s coming in 2016 will be expected to be alive until 2021 (no official announcement about this period tactics thus far though)
- ROS M-Turtle will be released in 2018 and maintained until 2023
Okay, so we can keep using Indigo until 2019. Sounds like still a long way to go. But in actuality will everyone be happy to be on board on the same OS and ROS for another 4 years, is questionable. In fact ROS LTS is 2-year interval, so switching to the next LTS while the oldest valid LTS is still supported will probably an option depending on your needs.
Well, anyways, there seems to be a huge milestone on 2020 for roboticists in Japan with the Summer Olympic Games in Tokyo. Are people going to use ROS Kinetic or ROS M-Turtle then?
With ROS K-turtle, Japanese language speakers feel like triumphed on getting “Kame” (turtle in their language) in its code name. But with M, there’s even a pet of all-time in Japan that the name starts from m. Midori-game!

No one can’t wait for “ROS Midorigame Turtle”, can we?
Ref. ROS release timeline http://wiki.ros.org/Distributions/Timeline
Back to the immediate concern, there’s a discussion for open controller of NEXTAGE OPEN that we’re maintaining about the versioning and the length of support. Please let us hear your thoughts in the discussion.
OSS in DRC Final 2015DARPA Robotics Challenge でのオープンソース活用状況
During more than 30 workshop and seminars we’ve held since the Summer 2014, we are delighted to have talked to many engineers/managers (mostly from Japanese large companies) who’re interested in applying opensource software technologies to their development. Among other things, one of the most keen questions is how opensource software, particularly ROS, is going to be put into the “real/large systems”.
Seeking a hint, Isaac visited DARPA Robotics Challenge Final (DRC) in Pomona, CA., to see the evolution and the extent of opensource technologies in the very large scale robotics projects (he didn’t forget to cheer 3 teams from JSK lab our board member Kei Okada leads!).
There he was able to talk to managers from OSRF and asked how they view actual usage of ROS and Gazebo simulator in the competition, which the answer was later revealed on their blog stating that out of 23 teams, 18 used ROS and 14 used Gazebo. In addition, our own research brings out that 3 teams used OpenRTM via ROS and 1build their system on OpenRTM.
All robots from 24 teams must be very complexed system without exception; not just the transformer robots that a few most successful teams such as KAIST, CMU, JPL. Combined with the pressure to get the award and the amount of the resource spent, failures due to the system error should have not been an option for any team. Seeing the fact that the opensource technologies were employed for such a mission critical system’s control and operation is the most encouraging.
[Appendix] Interesting screenshot/movie is shared here…IHMC made their garage even theatrical to set a monitor at the entrance of their garage that played operation display. Operator is probably trying to match the location of the grasp target object while looking at the actual pose by seeing both camera and sensor output, and send the command. Despite the sparsely received pointcloud data (once in 30 seconds?) due to the hypothetical disaster network condition, the operator’s work looks very effective.
2014年夏から開始した ROS セミナー/ワークショップシリーズは,お陰様でこれまで30回以上開催し,多くの企業/研究者様と意見交換をさせて頂いております.その会話の中で必ずと行って良いほど話題に上がるのは,オープンソース技術,とりわけ ROS は今後実システムに使われるようになっていくのかということです.ロボット開発用ソフトウェアのデファクトスタンダードという言い方をされる (Wired 誌) こともある ROS ですが,実際は用途は研究に限られ,大規模プロジェクトや製品,産業用途としての取組は徐々に本格化しつつある段階というのが大方の見解ではないかと思います.
折しも今年の5・6月は世界的に大きな競技会が続いたので,ロボット業界の大イベントである DARPA Robotics Challenge Final (DRC) の会場を訪れることにし,オープンソースのロボット技術の潮流を体感することにしました (当協会理事・岡田准教授の出場チームの応援は無論ですが!).
#なお DRC については詳細は省きます.例えば日刊工業新聞記事などをご参考まで.
さて,参加チームは,競技が終了するまでは目一杯でしょうし,突然訪れて技術の根幹を教えてくれるわけもありません.そこはそれ,ROS の運営を行う米・オープンソースロボティクス財団 (OSRF) の幹部達と話したところ (当協会理事・斉藤が以前同財団でインターンした際の上司でもあります),既に多くのチームが ROS を利用している感触を得ているとのこと.後日同財団 WEB サイトに掲載されたレポートによると,23チーム18チームにおいて ROS が,14チームにおいて Gazebo シミュレータの利用が確認されたとのことでした.また,当協会独自の調べでは,3チームが ROS 経由で OpenRTM を利用しており,1チームは OpenRTM を中心にシステムを構成していました.
参加した24種類のロボットの形態は,最多を占めた二足歩行だけでなく,優勝した KAIST の変形型や多足など,バラエティに富んだものとなりましたが,どのロボットも例外なく複雑なシステムであったと思われます.また,億を超える優勝賞金,投入するリソースの量からしても,各チームともシステムエラーによる失敗はまず避けたかったはずです.そのようなミッションクリティカルなシステムの制御にオープンソースの技術がこれだけ多くのチームで使われたというのは,オープンソース支持者として喜ばしい限りです.
[オマケ] ロボットの貴重な操作画面を撮影出来たので共有します.上位入賞した米・IHMC のものです.カメラ画像とセンサー画像両方を見つつ,環境モデル中のオブジェクトと知覚情報とを合わせた後に,タスク指令を出していると思われます.災害下の通信が不安定な想定のため,pointcloud が数十秒間に一回しか更新されない厳しい状況でも,そつなく作業を進めているのが見て取れます.このような高信頼が求められるシステムにおいて,ハードウェアでなくソフトウェア・ベースの入力装置が多くのチームに用いられたのも興味深いことでした,
なお IHMC は Java ベースの独自開発のプラットフォーム用いており,ROS API もあるとのこと.NASA JSC が開発中の二足歩行ロボット Valkyrie (2016年には Space Robotics Challenge のプラットフォームとして使用される) も同じソフトを使うそうです.
サービス精神旺盛の IHMC チームのガラージ前はこのようにモニターが据付けられ,チーム内外の人が気軽に観戦できるようになっている.小さいが写真奥には,競技中のロボットを操作するメンバーと DARPA の監視役メンバーが作業している.

Pilot workshop using NEXTAGE OPEN at Kawada RoboticsNEXTAGE OPEN ワークショップ (パイロット版) を開催しました (於: カワダロボティクス株式会社)
当協会では2014年8月から,オープンソース・ソフトウェアを用いてロボットを操作・開発体験するワークショップを開催してきており,小規模ながらこれまで30回以上開催・のべ100名様以上にご参加頂いています (これまでの開催内容は主にこちら・こちら・こちらの三種類).企業を中心とした参加者様のニーズは多様で,当協会としてもワークショップ内容の幅を今後より拡げ,ご要望に応えて参りたいと考えています.
その一環として,今回,カワダロボティクス社の NEXTAGE OPEN のワークショップ (パイロット版) を開催いたしました.このロボットは当協会がオープンソース版制御ソフトウェアをサポートさせて頂いており,今回カワダロボティクス社にロボットと場所のご提供を頂き,モニターとして既に同モデルのロボットをお使いの方々にお越し頂きました.
Starting from Summer 2014, TORK has been holding workshop/seminar/tutorials for introducing how to operate robots with opensource software, specifically ROS over 30 times for businesses in Japan (attendee has widely varied from robot manufacturers, electronics to web or even game developers). Today, we added another set of courses that use NEXTAGE OPEN from Kawada Industries (that also generously sponsored us the robot and the venue), of which opensource version of controller software we are very actively involved in its maintenance.

左図.会場としてお借りしたカワダロボティクス社の “コボット・パーラー” は,明るく落ち着いたリラックスできる協働スペースです.
ワークショップは,基盤となるソフトウェアである ROS の概要から始まり,ROS の代表的なモジュールの一つである MoveIt! を用いた動作生成を体験しました.また,体外に設置した点群カメラを用いた障害物を考慮した動作生成や,手先カメラで認識したマーカを掴む等,既存ユーザから要望の高い認識を用いたアプリケーションの概要も示されました.
当協会では今後このワークショップをラインナップに加え,NEXTAGE に興味をお持ちの方々や既にこのロボットをお持ちの方々の開発のヒントをご提供できればと考えております.初心者向け,中/上級者向けと,段階に応じて内容も充実させていく予定です.ご意見・ご要望を頂けると幸いです.info[a_t]opensource-robotics.tokyo.jp
Workshop started off with an overview of ROS and the review of basic concepts and commands. Then attendee experienced operating the robot with MoveIt! motion planner. Integration with vision (using Kinect, embedded hand cameras) was also introduced.
It is unclear yet whether the full content of the workshop will become available online, but some part of it that is missing from the current set of the tutorials will be added.
May 2015 ROS Workshop Schedule UpdateROS ワークショップ日程更新! (2015年5月)
企業向け ROS ワークショップシリーズ,2015年5月の開催分はまだお席がございます.好評により中級・マニピュレーション編の追加開催を決定しました!
各セミナーのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.
なお,中級・マニピュレーション編と,初級・産業双腕 Baxter 編の次回開催は都合により未定です (最遅9月には開催予定) ので,暑い日本の夏・ロボットの夏を迎えるための準備は今がチャンスです!
“ワークショップ” とは別に,理論や現状などを知りたいという方々向けの所謂”セミナー”の開催も検討しています.
また,お客様のオフィスを訪問しての出張・プライベートワークショップも好評頂いております.今年既に3件お邪魔致しました.
ご意見頂ければ幸いです.
info[a-t]opensource-robotics.tokyo.jp
Still some seats available in our ROS workshop courses in May 2015 in Tokyo! Some courses won’t be held for awhile (Introductory course using Baxter, and the Intermediate-Manipulation course) thus this will be your last chance before the bot-hot Summer in Japan! Any inquiry can be appreciated at info[a-t]opensource-robotics.tokyo.jp
ROS Workshop Schedule (May., 2015)ROS ワークショップ日程 (2015年5月)
企業向け ROS ワークショップシリーズ,2015年5月の開催予定日です.ゴールデンウィークや,企業様プライベートセミナーが複数入るなどして開催日が限られています.
各セミナーのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.
なお,これまで当社ではこれまで “セミナー” と呼んでおりましたが,この度ワークショップに改称しました.これらのワークショップではまず手を動かしてみてから理論を学ぶ,という方法を取っているためこの方がより適当であると考えました.
“ワークショップ” とは別に,理論や現状などを知りたいという方々向けの所謂”セミナー”の開催も検討しています.ご意見頂ければ幸いです.
info[a-t]opensource-robotics.tokyo.jp
5 ROS Seminar courses will be held in April 2015 by TORK in Tokyo, Japan. Any inquiry can be posted at info[a-t]opensource-robotics.tokyo.jp
ROS Seminar Schedule (Apr., 2015)ROS セミナー日程 (2015年4月)
2014年夏に開始した企業向け ROS セミナーシリーズはお陰様で大好評を頂きました.2015年度も引続き開催して参ります!4月は合計5回の開催を予定しています.各セミナーのページ内にあるカレンダーを参照して日程を確認し,同ページ内にあるリンクを使ってお申込を行って下さるようお願い致します.

5 ROS Seminar courses will be held in April 2015 by TORK in Tokyo, Japan. Any inquiry can be posted at info[a-t]opensource-robotics.tokyo.jp
Action required for NEXTAGE OPEN users for the upcoming software updateNEXTAGE OPEN ユーザの皆様へ:次回ソフトウェア更新する際の大事なお報せ
Upon the upcoming software update that’s reportedly scheduled soon (today: March 12, 2015), you might be required to apply small changes to your application.
Please read the following announcement and figure out if you’re affected, and take necessary actions.
https://github.com/tork-a/rtmros_nextage/issues/153
Please do not hesitate to send us any questions.
TORK
次回ソフトウェア更新の際に,お客様がお使いの NEXTAGE OPEN が動かなくなる場合があります.大変お手数ですが,以下リンクのアナウンスをお読み頂き,アクションが必要な場合は実施下さい.
https://github.com/tork-a/rtmros_nextage/issues/153
ご不明点はどうぞ遠慮なくご質問下さい.
東京オープンソースロボティクス協会
Seats still available for ROS seminars in March 20152015年3月開催の ROS セミナーご参加募集中です
3月中に東京・湯島にて開催する ROS セミナーに若干のお席の余裕がございます.こちらのフォームよりお急ぎの上お申込みを頂ければ幸いです.
3/6/2015 中級・マニピュレーション編 終了
3/13/2015 初級編 終了
3/24/2015 中級・マニピュレーション編 満席.
4月にも予定していますので当協会 WEB サイト (今ご覧のサイトです) か Twitter を引き続きご覧下さい.
3rd ROS Basic seminar with Baxter in TokyoROS セミナー基礎編・産業用双腕 Baxter 第三回開催のお知らせ
TORK is holding the 3rd and 4th Baxter Research Robot seminar in March after the successful previous occurence in January. See the detail and how to register in this page.
2015年1月の第二回も好評を博しました Baxter ROS のセミナー,これまでと同様日本バイナリー株式会社様の協賛により,3月に二回のセミナーを東京で開催することとなりました.Baxter Research Robot の紹介に加え,ROS を用いた動作計画プログラミング,認識行動プログラミングを体験することが出来ます.セミナーの詳細・申込み方法はこちらよりご覧ください.
2nd Baxter Research Robot seminar in TokyoBaxter Research Robot セミナ第二回開催のお知らせ
TORK is holding the 2nd Baxter Research Robot seminar this month after the successful occurence in Dec 2014. See the detail and how to register in this page.
2014年12月に開催し好評を博しました Baxter Research Robot のセミナー,前回と同様日本バイナリー株式会社様の協賛により,今月1/27 (火曜) に同社東京オフィスで開催できる運びとなりました.Baxter Research Robot の紹介に加え,ROSを用いた動作計画プログラミング,認識行動プログラミングを体験することが出来ます.セミナーの詳細・申込み方法はこちらよりご覧ください.
Seminar for Baxter Research RobotBaxter Research Robot セミナ開催のお知らせ
12/13/2014: 終了しました.今後の Baxter セミナーの情報はこちらに更新して参ります.

- 主旨:米・Rethink Robotics 社が2012年に,安価・安全を売りとして中小企業の生産ライン向けに発表した協調作業用の双腕ロボット Baxter Research Robot (研究版) の概要と使い方を解説します.先端的なメカニズムとインターフェースを持つ Baxter ロボットの特徴に加え,近年研究開発分野でユーザが広がってきているオープンソースのロボット用ソフトウェア ROS を使った,動作計画プロうグラムや認識行動プログラム例も概要を紹介し,ご体験いただきます.
- 名称:Baxter Research Robot セミナー(ショートコース)
- 主催:東京オープンソースロボティクス協会
- 協賛:日本バイナリー株式会社
- 日時:2014年12月9日 (火) 14:00-17:30
- 場所:日本バイナリー株式会社様 セミナールーム (東京都港区芝)
- 費用:12,000円 (学生向けのオープンソース協力特別無料コース有り)
- 対象
- Baxter Robot の特徴について知りたい方
- Baxter Research Robotを用いたプログラミングに興味の有る方
- ROSの概要,並びにプログラミングに興味がある方
- カリキュラム
- 第一部 Baxter ロボット/ROS概要の紹介
- Baxter ロボット紹介
- Baxter Research Robot,ROS 概要
- 第二部 ロボットプログラミング・ハンズオン
- MoveIt! 動作計画プログラミング
- 視覚認識と行動生成プログラミング
- 第一部 Baxter ロボット/ROS概要の紹介
- ご持参頂きたい物
- 第二部では以下条件を満たすコンピュータをご持参いただくと,実際にプログラミングを体験していたくことが可能です.
- Intel i5 以上,4G以上のメモリ,7G以上の空ディクス容量,ネットワーク接続
- ハンズオン講習はUbuntu 12.04/ROS Hydro 環境で行います.
- ご持参いただくコンピュータがWindows,Macの方にはハンズオン講習可能なLiveUSBを提供します.
- 第二部では以下条件を満たすコンピュータをご持参いただくと,実際にプログラミングを体験していたくことが可能です.
- お申込: 締めきりました.次回開催予定も当 WEB サイトや Twitter 等で告知いたします.
- お問合せ:info[ at ]opensource-robotics.tokyo.jp
なお本セミナー受講されたお客様には続きとして,Baxter Research Robot の使いこなす上で欠かせない ROS に関するセミナーも,当協会では下記の通りご用意しております.
また,Baxter Research Robot の日本語コミュニティも開設されました.ros-sig-baxter-jp+subscribe@googlegroups.com へメイルを送るだけで,どなたでも無償購読できます.
TORK assisted Toyota to run a hackathon on HSR (Human Support Robot)トヨタ自動車様が開発中のロボット HSR (Human Support Robot) を用いたハッカソンを支援させて頂きました
トヨタ自動車株式会社 (以下トヨタ) 様が,同社が開発中のロボット “HSR” を用いた “ハッカソン” を行い,弊社はイベント運営とソフトウェア開発のお手伝いをさせて頂きました.
“ハッキング” (注) + “マラソン” の造語であるハッカソンは,短期間に集中してアイデアを出し合いながらソフトウェア開発を行い技術やアイデアを競い合うことで,新たなイノベーションのきっかけを模索するイベントです.
HSR は手足が不自由な人や高齢者の支援の為に開発中のロボットで,物を運んだり離れた所に居る人の様子を確認するなどして,家庭や施設での介護支援が念頭に置かれています.
トヨタ様では,HSR を研究の或いは医療福祉サービス提供のプラットフォームとして興味をお持ちの方々に実際に開発体験をして頂き,高性能のモバイル・マニピュレータを自由に扱って愉しみつつ,ユーザ視点のフィードバックを頂くことで今後の開発に繋げたい意向です.今回は,国内の研究者・学生の合計15名の方々を対象に,2014年10月23日,24日の二日間に渡り東京・湯島で開発を行なって頂きました.
まずデモと安全講習,チュートリアル等によってロボットの可能性を把握頂いた後,参加者はチームに分かれてこのロボットでの開発内容を話し合い,二日間の八割程度をチームごとの開発に費やしました.やはり HSR の本来の開発目的である介護シーンでの利用を中心に,しかし中にはエンタテイメント性を含んだり,バラエティのあるデモ案が実装に取組みました.
HSR は自己位置推定や認識に基づく障害回避,動作計画といった高度機能を搭載しており,それらはオープンソースのロボット用基盤ソフトウェアとして世界に広まりつつある ROS (Robot Operating System) 経由で利用できるため,既に ROS に習熟した参加者は違和感なくそれらの機能を用いて開発を進めることができたようです.一方 ROS にそこまで明るくない方も,簡易的にプログラミングできる Python 言語環境が用意されたため,支障なく開発を行うことができました.
二日間の最後には,成果発表,懇親会,ハッカソンイベントの”恒例”であるお揃いのイベント T シャツでの記念撮影などを通じ,濃密な二日間の労を労いつつ,HSR の今後の発展を話題にしながら親睦を深めました.
 HSR 三体が出動!
HSR 三体が出動!
 開発真っ最中.活発な質問を頂き,トヨタ様・弊社共にスタッフも対応中.
開発真っ最中.活発な質問を頂き,トヨタ様・弊社共にスタッフも対応中.  ハッカソンの友:エナジードリンクの山.
ハッカソンの友:エナジードリンクの山.
 HSR,会話中 (静止画で伝わりにくいですが).
HSR,会話中 (静止画で伝わりにくいですが).
 トランプ対決!
トランプ対決!
 HSR は無事に洋服を届けられるか?全員が固唾を飲んでます.
HSR は無事に洋服を届けられるか?全員が固唾を飲んでます.
 ハッカソン T シャツを着込んだ皆様と HSR.お疲れ様でした!
ハッカソン T シャツを着込んだ皆様と HSR.お疲れ様でした!
注:ハッキングはコンピュータ等技術の深い知識を利用して様々な課題をクリアする行為を指します.メディア等では悪意を持ったコンピュータの侵入行為等がハッキングと呼ばれますが,本来その意味は”クラッキング”として区別されます (参考: Wikipedia).
Toyota Motor Corporation (TMC) hosted a 2-day hackathon on their HSR (Human Support Robot) on October 23th and 24th in Tokyo. TORK assisted the event organization and making the software.
HSR has been developed as an elderly care for domestic situations as well as in medical facilities. This time TMC invited researchers and students from institutes in Japan. 15 participants got a hands-on experience, tried out making small tasks to let the mobile-manipulator robot interact with human, and had fun.
All of the higher-end functionalities such as self-localization, vision-based collision avoidance, motion planning and so on are available via a de-facto standard opensource robotics framework ROS (Robot Operating System) (that is, as previously announced). It also comes with script language interface so that it doesn’t require developers to be well acquainted with ROS.
With the feedback from the attendees this time TMC expects to boost the development in the future.
Reference:Announcement on TMC Facebook page (in Japanese)
One of the best accompaniment at hackathons: energy drinks.
HSR, talking.
HSR plays the card!
HSR picking a shirt for an (hypothetical) elder person.
Baxter Research Robot ROS Users Community in JapaneseBaxter Research Robot の ROS ユーザ向け日本語コミュニティ
So it’s been awhile since the Rethink Robotics has announced an industrial dual-arm robot Baxter, and the community of its research version has been very active world-wide. We just created a yet another community particulalry for users who are the most comfortable in Japanese.
Splitting forums into each language is always a question when the knowledge for the subject domain overlaps almost 100% so that users in any language could have shared info if the discussion channel is united. Reality isn’t that just simple for people who are naive to English and often end up being passive about expressing themselves. Thus we rather open a language sig to first stimulate the conversation local to the language. Hope one day technology evolves so that you can query in any language and reach the same batch of info (I know you have come close Google)!
Join here: Baxter ROS user group in Japanese
Rethink Robotics が安価な産業用総腕ロボット Baxter とその研究者向け版 (RBB) を発売して久しいです.その英語のコミュニティは活発で毎日何通かのメイルで Baxter 固有の問題に関するやり取りが行われています. しかしそこでの日本人と思しきユーザの発言は極めて少ないのが現状で,日本語の Baxter ユーザは居ないのではないかとすら思えてしまいそうです.
言語毎にコミュニティを分けるのは,あるドメインのコミュニティにとって最良の解決策ではありません;一般的でない言語で書かれた情報はその言語ユーザ間でしか共有されず,共有されない情報は発展もしないので,長い目でみると誰もハッピーになりません.しかしながら現実は言語が隔てる壁は高いのも無視できません.理想を掲げる前に,まずは発言を共有したいと考え,Baxter 日本語コミュニティを作りました.
http://groups.google.com/d/forum/ros-sig-baxter-jp
いつの日か技術によって言語関係なく情報を共有できる日が来たら楽ですね.
Seeking a talent for immediate short-term web-robot development超短期の web-ロボット開発作業ができる方を募集します
We’ve posted an ad on ros-users forum. Forwarding to anyone who might get interested in is appreciated!
超短期の募集を ros-users フォーラムに告知しました.ご興味ありそうな方に転送下されば幸いです.
TORK to appear at ROS Kong 2014TORK は香港でのワークショップ “ROS Kong 2014” に参加します
On top of any community socializing events that have been recently announced in ROS community, ROSCon is the one officially organized by the maintainer of ROS, OSRF, and has been the most attractive force for the last two years since its first occurrence. Now this year it comes to Asia for the very first time, in Hong Kong!
Among all the guests speakers coming around Asia-Pacific region including Korea, Australia, Hong Kong and two from Japan, an associate professor at University of Tokyo and our CTO Kei Okada is honorably giving an opening speech at a one-day event. Here’s an abstract excepted from ros.org.
Hope to see you there!
Open Source Robotics at JSK/Tokyo
Kei Okada
Robotics, specially Humanoids research requires long-term vision and efforts due to it’s complexity and synthesis. This talk will show research history on humanoid robots last 20 years at JSK/U-Tokyo and discuss how we have been integrating and maintaining integrated humanoid software over different generation of both students and robots. Rapid-prototyping and contentious-development is the key of these environment and how these features are utilized in national/international projects and challenges. From this perspective, emergence of opensource robotics had great impact since we already had great deal of in-house software resources and had to cope with how to fuse and connect existing internal software and external open software. I’ll not only explain strategy to this integration but also show our automatic translation system of different software component. Lastly, I’ll explain our effort on commercializing our software in Tokyo to expand open robotics software not only academia but also robotic industries.
 (Image referring to https://events.osrfoundation.org/wp-content/uploads/2014/03/ROSKong14_Shirt_500.png)
(Image referring to https://events.osrfoundation.org/wp-content/uploads/2014/03/ROSKong14_Shirt_500.png)
過去二年間,ロボティクスの国際学会 ICRA の直後に開催されてきた ROS 開発者・ユーザの祭典 ROSCon ですが,今年は遂にアジアで初めて,香港での開催となりました!
それに伴ってか少し趣旨変わり,これまで二日間だったのが一日間となり,名称もこのようになりました.ROS コミュニティのアジアでの勃興を意識してなのか,ゲストスピーカーも韓国,豪州そして地元香港から一名,そして日本から二名と環太平洋勢となりました.そんな中,東京大学准教授・当社代表理事の岡田慧がオープニングのスピーチをさせて頂くことになりました.ros.org に掲載されたアブストラクトを以下に引用します.
Open Source Robotics at JSK/Tokyo
Kei Okada
Robotics, specially Humanoids research requires long-term vision and efforts due to it’s complexity and synthesis. This talk will show research history on humanoid robots last 20 years at JSK/U-Tokyo and discuss how we have been integrating and maintaining integrated humanoid software over different generation of both students and robots. Rapid-prototyping and contentious-development is the key of these environment and how these features are utilized in national/international projects and challenges. From this perspective, emergence of opensource robotics had great impact since we already had great deal of in-house software resources and had to cope with how to fuse and connect existing internal software and external open software. I’ll not only explain strategy to this integration but also show our automatic translation system of different software component. Lastly, I’ll explain our effort on commercializing our software in Tokyo to expand open robotics software not only academia but also robotic industries.
それにしても Kong という名称になっても ROS の場合はどこに行こうがやはりカメのようです.日本人だとキングコングや,往年の TV ドラマ “特攻野郎 A チーム”などを想起してしまう方もおられると思いますが (私はそうでした.歳がばれる?).
(Image referring to https://events.osrfoundation.org/wp-content/uploads/2014/03/ROSKong14_Shirt_500.png)
TORK Adds Another ROS wiki Mirror
As we mentioned a few months ago, mirrored web sites for ROS documents are in much need, not just when the original web site isn’t accessible but for a number of other reasons.
In ros-users forum there was recently an update announcement about ROS wiki mirroring status, and improved maintenance method for mirrors. On or before that announcement, TORK started mirroring wiki and api docs as well, which is also now noted in the list of mirrors on wiki.ros.org.
Needless to mention that this list of mirror sites aren’t accessible when the web site is down too…so I’ve updated a “mirror” of the list of mirrors.
Adopting Research Robots余っている研究用ロボットを探しています
April! The beginning of new fiscal year, new school, and most importantly the season of sakura blossoms here in Japan! So do we something new. TORK is planning to dedicate more this year on testing and stabilizing the software packages we develop/maintain on as many robots as possible. To do so we need testbed — robots. Yes, we need robots. We’re looking for research robots, preferably with an arm or two, that we can “adopt” from you. While we mainly limit to Japan where we have some ideas of how to legally transfer the machines, your contact from anywhere on earth would be appreciated to info [a t] opensource-robotics.tokyo.jp about your robots or about the possible collaboration.
東京オープンソースロボティクス協会は,多品種のロボットで試験を行い,より高信頼で適応性の高いソフトウェアの開発評価を行ないたいと考えています.ご使用予定の無いロボットがありましたら,お譲り頂ければ幸いです.info [a t] opensource-robotics.tokyo.jp までご一報ください.
wiki.ros.org ミラーサイト
According to status.ros.org, the wiki pages of ROS (wiki.ros.org) has been busy these days handling more than 60 requests every day every minute every day on average (seen on 2/20/2014). Just in case the web server may want to take a break for a moment, there are mirrors all over the world. The URLs are listed on this blog.
Ubuntu deb packages available (hrpsys and some of its clients)hrpsys 等の Ubuntu deb バイナリをメンテしています
The binary files have been already there since several months ago; this announcement is to raise more attention to the wonderfully easy debian packages that hopefully free you from compiling nightmare (unless you enjoy it more). Feedback is very welcomed!当社エンジニアの Isaac が,hrpsys や関連パッケージの Ubuntu バイナリ化状況について告知しました.
これらバイナリは実際は数ヶ月前,2013年夏頃から入手可能になってはいましたが,認知度を高め,コマンド一発で入手可能であることの便利さを体験して頂こうと考えたため,改めて告知しました.ご自分でコンパイルしないと気が済まない質でも無い限り,有効に利用頂けると期待しております.フィードバックも大歓迎です.
Our Demos in New Year MoveIt! MontageMoveIt! モンタージュに弊社ロボットデモ二件が取り上げられました
Happy 2014!
Last year was our inaugurate and thank you for the support and interest. We hope this year is going to be even more fruitful for both the world’s opensource robotics and us!
Development team of MoveIt!, a state-of-art motion planning tool in ROS, released a montage where two of the demo we were involved in last year (DENSO’s VS060,Kawada’s Nextage Open) are included. We happily refer to it to compensate our new year’s greeting.
2013 年は私達東京オープンソースロボティクス協会立ち上げの記念すべき年となりました.本年もより一層世界のオープンソース・ロボティクスに貢献していく所存です.
さて,ROS の動作計画ツール MoveIt! のビデオに私達が携わった動作計画デモ二件 (デンソー社 VS060,カワダロボティクス社 Nextage) が含まれたので,年賀状代わりとして引用させていただきます.
デンソーの産業用ロボット用 ROS パッケージ “denso” を公開しました
From ros-users.
デンソー社の産業用ロボットに対応する ROS パッケージを公開しました.経路計画アプリケーションの MoveIt! に対応します.

- 現在垂直多軸アームの VS-060 に対応します.
- ROS は UDP ベースの標準化されたプロトコル “ORiN” を通じてロボット内のコンピュータと通信します.このコンピュータは産業界で実績のあるもので,また ROS からの指示内容の異常値を検出する機構も持っています. これにより,同社製品の信頼性は損なわずにオープンソースの恩恵を取り込むことが可能になりました.
- しかしながら今回発表の ROS パッケージはまだ実験的なので,ユーザからのフィードバックは貴重です. RViz を利用したシミュレーションによって障害回避を体験して下さい.
- 東京大学 JSK が開発し,東京オープンソースロボティクス協会がメンテナンスを行います.
最期に,障害回避アプリケーションに不可欠な,ロボットの幾何モデルをオープンソースコミュニティに提供くださったデンソー社に感謝します.
岡田慧,植田亮平
1/05/2014 更新: パッケージ名を densowave から denso に更新しました.
IROS/iREX DVD content instructionIROS/iREX で配布した DVD の使い方ページ
At IROS and iREX 2013 that is occurring from Nov. 4 through 9, 2013 in Tokyo, we are showing demo at Kawada Robotics compartment. There we are distributing a DVD that contains an installer for our ROS-based robot component software rtmros_hironx. Here’s an instruction for it that you may find useful after installation is done. Enjoy!
現在開催中の IROS と iREX 2013 に,カワダロボティクス社のブースで展示中です.
お越し頂いた特典として,同社のスティッカーの他,TORK からは私達が保守を行なっている ROS ベースのソフトウェア rtmros_hironx を梱包した DVD を配布しています.
お使いの Ubuntu コンピュータに挿せばインストーラが起動し,すぐにお使いいただけます.200 枚用意した DVD もここまで四日間でおかげさまで残りわずかとなりました.しかし申し訳ないですがその使い方を書くのを忘れました!今回ここに記載したので,参照し,シミュレータ (/勿論実機をお持ちの方は実機で!) でお試し下さい.
続きを読む