信州大学の HIRO ロボットソフトウェアが Ubuntu 20.04 + ROS Noetic に対応
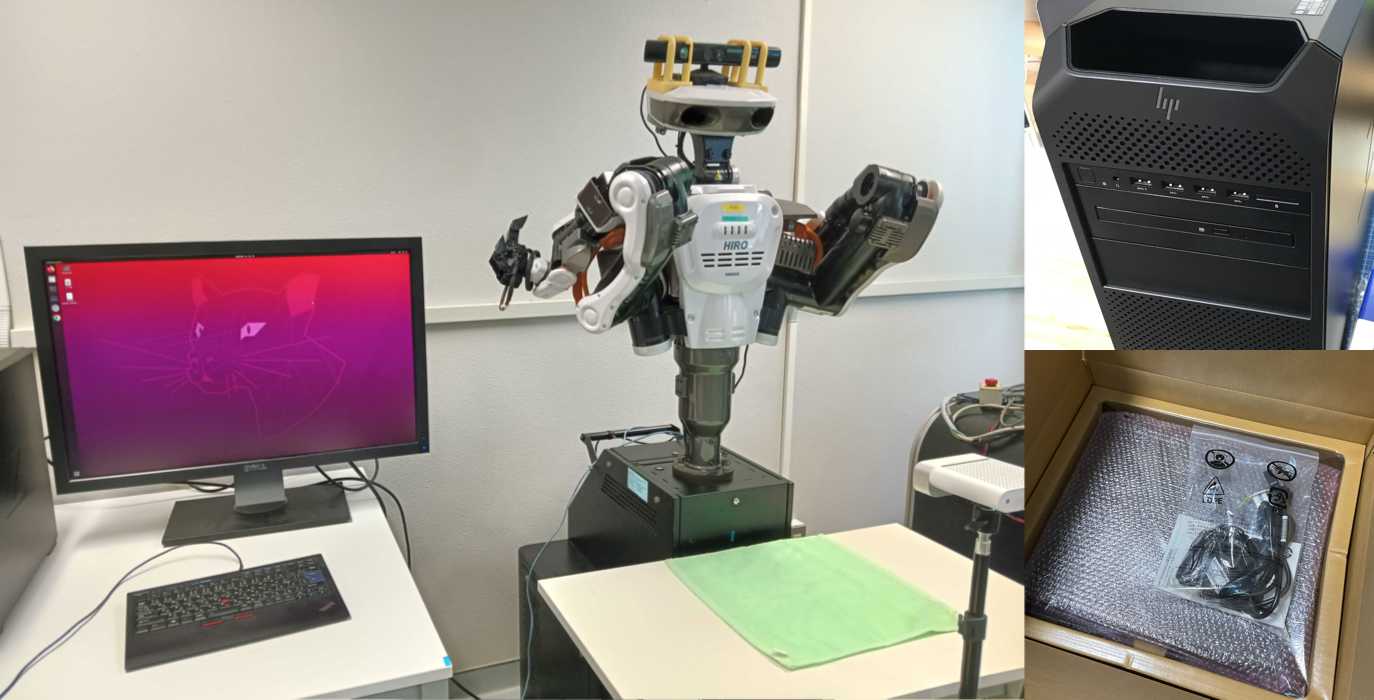
先日,長野市にある信州大学の山崎研究室を訪問して Ubuntu 20.04 および ROS Noetic に対応した HIRO ロボットソフトウェアを納品しました.

山崎研究室では HIRO で AI を用いたロボット制御などを行っているとのことで,今回は GPU ボードを搭載したワークステーションに Ubuntu 20.04 および ROS Noetic に対応した HIRO ロボットソフトウェアをインストールしました.


HIRO ロボットは新しいソフトウェアを得て今後も活躍してくれることと思います.
なお, 今回の HIRO とともに TORK では NEXTAGE OPEN も Ubuntu 20.04 および ROS Noetic に対応したロボットソフトウェアの動作確認をしました.
NEXTAGE OPEN や HIRO を Python3 で動かすことや ROS Noetic で使うことにご興味がありましたら,TORK( info@opensource-robotics.tokyo.jp )にお問い合わせいただけたらと思います.
関連記事: 信州大学 山崎研究室でHiroに会いました!
NEXTAGE OPEN も登場:MoveIt! 5周年記念モンタージュビデオ
ROS の動作計画ライブラリ MoveIt! が,5周年を記念してアプリケーション例のビデオを公開しました.
MoveIt! チームがこのようなビデオを公開するのは4年前・2013年に次いで2度目ですが,ソフトウェア公開間もなかった当時と比べ,だいぶ Pick&Place,物を掴んで目的地に設置するというタスクが多く,技術の進展が窺えます.個人的には MoveIt! の課題領域としても挙げられている台車,水中ローバ等の移動体に取り付けられたアームの制御例が数件含まれ,既に実現されてるのかも気になります (このページの “Mobile base integration”).
また弊社がその opensource 版ソフトウェアのメンテナンスに積極的に関わり,サポートサービスも提供させて頂いているカワダロボティクス社製 NEXTAGE OPEN も登場します.弊社ブログ上でもお馴染み?の Spain のシステムインテグレータ・Tecnalia 社が手がける Airbus 向けアプリと思われます.
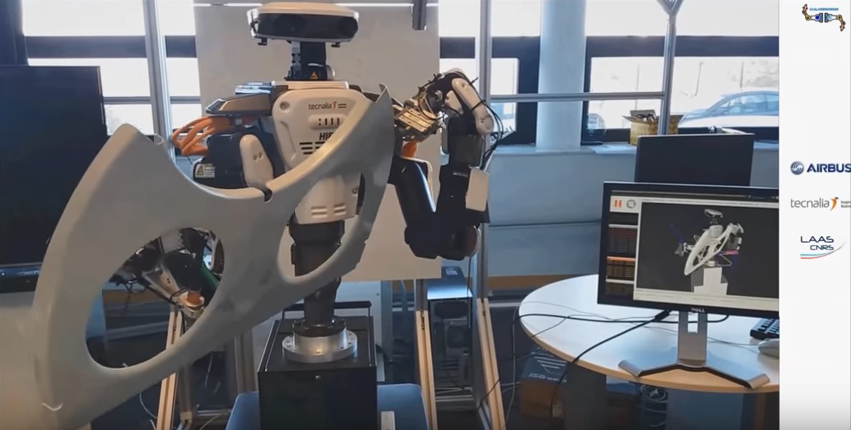
Hironx in motion from MoveIt! 5-year montage by courtesy of Tecnalia
TORK では2013年の創業以来,ROS,MoveIt! のソフトウェア改良,普及に貢献し続けています.貴社ロボットへの MoveIt! の導入御検討であれば,弊社ワークショップで体験もできますので,参加を是非御検討下さい.
P.S. 今回のビデオの開発者一覧も公開されました.
(0:06) Delft Robotics and TU Delft Robotics Institute
(0:09) Techman Robot Inc.
(0:13) Correll Lab, CU Boulder
(0:37) Nuclear & Applied Robotics Group, Unv Texas
(0:50) Beta Robots
(0:55) GIRONA UNDERWATER VISION AND ROBOTICS
(1:03) Team VIGIR
(1:34) Honeybee Robotics
(1:49) ROBOTIS
(1:58) TECNALIA
(2:05) Correll Lab, CU Boulder
(2:26) TODO Driving under green blocks
(2:38) ROBOTIS
(2:54) Fetch Robotics
(3:05) Hochschule Ravensburg-Weingarten
(3:12) TU Darmstadt and Taurob GmbH – Team ARGONAUTS
(3:20) isys vision
(3:27) Technical Aspects of Multimodal System Group / Hamburg University
(3:33) Clearpath Robotics
(3:43) Shadow Robot
MoveIt! 計画された軌道のビジュアライゼーション
2017年6月初のパッケージ更新により MoveIt! が更新され,これまで要望のあった軌道の目視確認機能が追加されました.
これまでは,生成させた経路を確認するには,RViz 上で “Loop Animation” をオンにして経路を反復再生させる手があったかと思います.この方法だと経路の途中の任意の経由点で止めることはできませんでした.
今回追加された機能を使うと,RViz 上でスライダを移動することにより,軌道の経由点を静止した状態で目視確認できます.
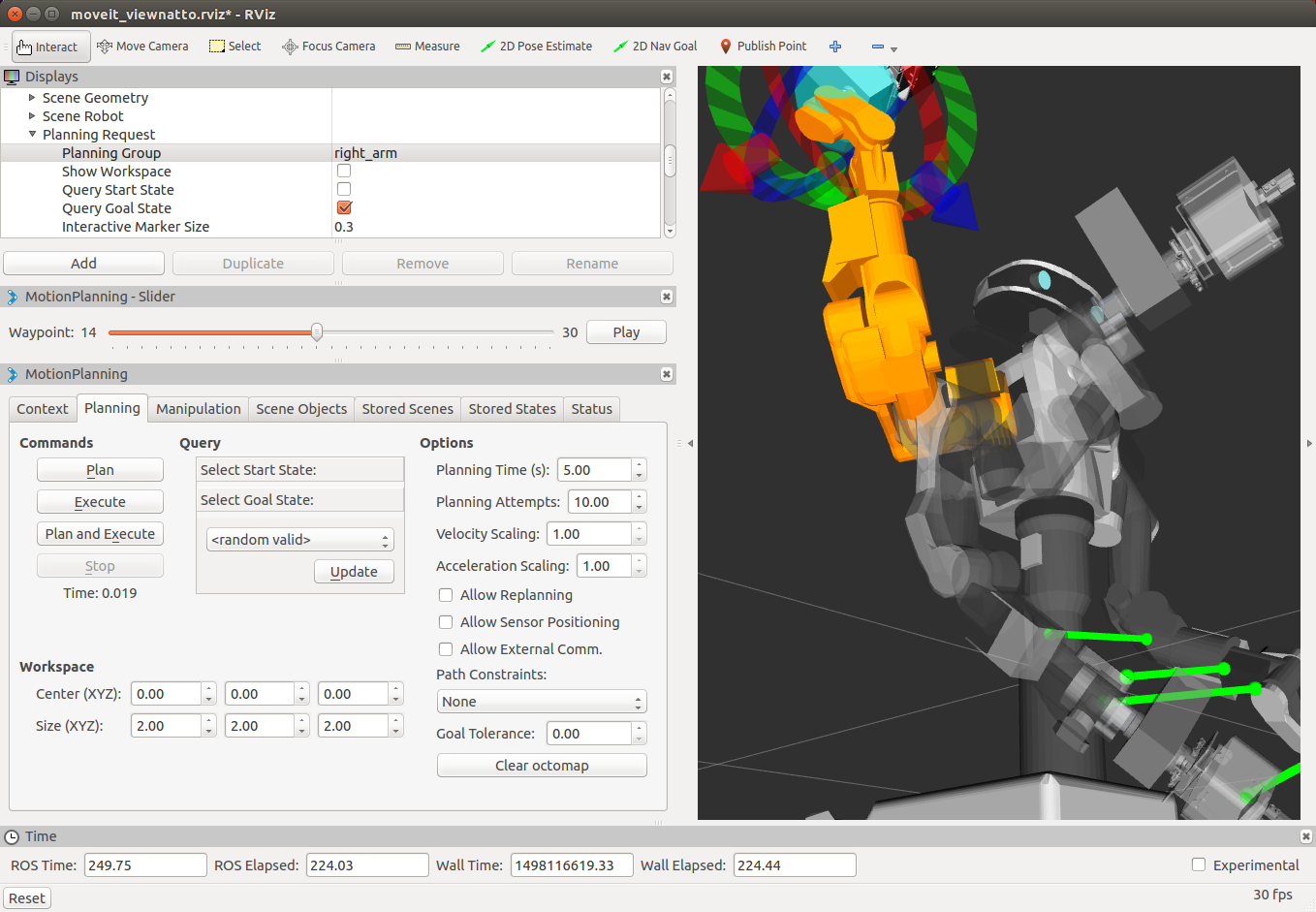
As you see on the slider on the left side, you can now introspect each waypoint in a planned trajectory on MoveIt! on NEXTAGE Open.
本機能を有効にする方法はチュートリアルを参照下さい.
(図面付き) NEXTAGE OPEN の頭部カメラのキャリブレーションHead-mount stereo camera calibration for NEXTAGE OPEN
NEXTAGE OPEN で頭部ステレオカメラを利用する際の,カメラの姿勢を手軽にキャリブレーションする方法を公開しました.
ROS では幾つかカメラを用いたキャリブレーション用パッケージが利用できます.ROS 初期の代表的ロボット PR2 向けに作られた calibration,産業用ロボット向けに豊富な機能を持つ industrial_extrinsic_cal,最近ではキャリブレーション結果を用いてロボットのキネマティクス情報を更新してくれる robot_calibration というのもあります.いづれもハードウェア and/or ソフトウェアの前準備が大変だったり,高機能ゆえに計算に時間がかかったりと,扱いに慣れが必要です.
今回ご紹介する方法は基本的にチェッカーボードをロボットに固定さえすれば実施可能です.詳しい方法を ROS wiki に記載しています.ステレオカメラで胸部あるいは腰部に固定したチェッカーボードを認識することにより,頭部カメラのロボット上の相対姿勢を取得します.カメラの据付位置座標が分かれば,Gazebo シミュレータ上でもキャリブレーションを行い相対姿勢を取得することが可能です.


胸部に付けたチェッカーボードを認識中

ロボットに固定したチェッカーボードを認識することで,ROS の座標変換ライブラリ “tf” により,カメラの正確な相対姿勢が判明します.


Gazebo 上の Kinect でチェッカーボードを認識している様子.
なお,キャリブレーションに用いたチェッカーボードの NEXTAGE OPEN 本体への取付けに必要な部品一式の図面もGitHub 上で公開しています.また,TORK では Xtion をかっこ良く頭部に取り付けたい場合 外装を御用意しています (日本国内のみ).
現状では上記 wiki ページで紹介されている方法は Kinect 或いは Xtion を利用しています.NEXTAGE OPEN がデフォルトで搭載する頭部の Ueye カメラ二基を用いても同じ方法は有効のはずですが,Ueye 個別の操作方法は未だ記載していません.ROS wiki は誰でも編集できるので,もし Ueye でキャリブレーションに成功した方がいたら是非情報を追記頂けると,全世界の NEXTAGE OPEN ユーザが喜ぶと思います!
Recently we’ve updated the instruction for the NEXTAGE OPEN’s calibration using head-mount stereo cameras.
There has been mutilple camera/robot calibration packages in ROS; calibration package worked well for the PR2 robot, a high-functional reference model of ROS in the early era until very recently. Then for industrial usage industrial_extrinsic_cal was developed with abundant functionalities to cope with complexed needs. Relatively newer robot_calibration package, which is maintained by the warehouse robot manufacturer Fetch, even updates the robot’s kinematics parameters using the calibration result. Almost all of these practical features come with a cost of labor in hardware and/or software, however.
The approach we’re presenting is simple enough since all you need is a checkerboard — not even a board but a plain or even a piece of paper will do as long as checker matrix is printed on it. Detailed steps are available on ROS wiki. Basically get the pose of the camera mounted on top of the head or actually anywhere on the robot, by recognizing the checkerboard. You can also carry out the calibration on Gazebo simulation as long as you know the location to attach the camera so that you can spawn the camera’s 3D model in the virtual world.
Detecting a checkboard at the chest.
Recognizing the checker pattern, which is in a fixed pose w.r.t the robot, yields the camera’s relative pose w.r.t the robot as a result of “tf” computation.
Seeing checkerboard through a simulated Kinect on Gazebo.
We’ve also made the design of the checkerboard kit publicly available on NEXTAGE OPEN’s GitHub repository so that any handyperson can go through these steps.
As of now the instruction in the wiki above only uses Kinect or Xtion, i.e. the operation of the Ueye cameras that NEXTAGE OPEN comes with by default is a bit different but that’s not documented yet, although the calibration part is intended for any ROS-based stereo camera so it should work for Ueye too. Every one is welcomed to edit ROS wiki to add your findings in this regard. Power of opensource!
First MoveIt! Update in 2017. Using it on NEXTAGE pt.12017年始早々 MoveIt! 新バージョンがリリース.NEXTAGE で使ってみる その1
MoveIt! の最新バージョンが公開になりました.昨2016年にメンテナンスチームがリニューアルして以降,MoveIt! の開発が活発になり,それまで溜まっていた問題報告やパッチ候補の処理が加速しました.今日現在利用可能な ROS の3つの異なるディストリビューションそれぞれに最新版がリリースされています (Indigo 0.7.6, Jade 0.8.3, Kinetic 0.9.3).今回のリリースではバグ修正に加え,ユーザの要望の高かった機能も幾つも追加されています.その内の一つの機能をカワダロボティクス社の NEXTAGE Open のシミュレータを用いて見てみます.
1.軌道実行時の際の速度・加速度をの動的に変更
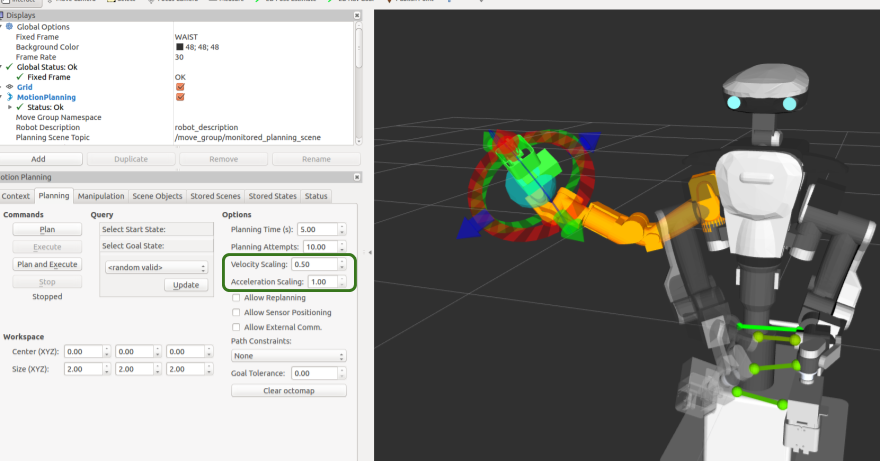
MoveIt! の RViz プラグイン上に新たな機能が追加されました.スピンボックス上の値を 0-1 の間で変更することでロボットアームの軌道実行の速度,加速度を変更できます.
御自身のロボットの3次元モデルファイル (URDF 或いは SRDF) 内に指定している関節速度/加速度を0-1の間でスケールすることができるようになっています.
New version of MoveIt! binary 0.7.6 is just released for ROS Indigo, first time in 2017 (for sure!) and first release since June 2016. This version comes with some long-wanted features (along with bug fixes of course) that we’re trying out using NEXTAGE simulator.
1. Changing trajectory velocity and acceleration during runtime
Changing the speed of the trajectory during runtime has been one of FAQs from NEXTAGE users who use MoveIt!, let alone many MoveIt! users on the globe. Now through MoveIt! RViz plugin you can conveniently configure that on the fly on the spinboxes added.
RViz 上でなくプログラマティックに変更したい場合は MotionPlanRequest トピックの値を変更することで runtime/プログラム実行中に変更できます.
次回に続く.
To configure that programmatically, see this tutorial that explains chainging MotionPlanRequest topic would do the work.
TORK is very actively contributing the development and maintenance of MoveIt!.
NEXTAGE Open in Singapore revisited: both hands assembly using camera imageNEXTAGE Open in シンガポールその2:画像処理と両手を使った物品組み立て
ROS が普及したことで,ロボット開発者の間である種の共通言語となりつつあると言っても過言ではありません.既に多くのロボットの可動実績があり,ユーザ数は10万人を超えるとも言われ (2015年 ROSCon より),ロボットのシステム構築において着実に情報が蓄積されており,それを元に更に益々ユーザ層が厚くなるといった良い循環ができています.
とはいえロボット毎のハードウェアの違いを基にした差異は避けられないもの.同じロボットを扱う開発者間の情報は貴重でしょう.
弊社がソフトウェアのメンテナンスを中心となって行わせて頂いている NEXTAGE Open (カワダロボティクス社) も世界中にユーザがおり,私達も情報共有に微力ながら貢献しています.NEXTAGE Open の ROS 版ソフトウェアの利用に際して,議論はメーリングリストへ,御質問は github へどうぞ.
[github-issues username=”tork-a” repository=”rtmros_nextage” limit=”10″]
表.github 上で議論中のチケット一覧
今日は,先日もお伝えしたシンガポールの Nanyang Technological University (NTU) の研究者が公開している,NEXTAGE Open の動画を紹介します.今回はカメラからの入力を元に幾つかの Pick&Place を行っているようです.今のところこれら動画中のアプリケーションソフトウェアは公開されていないようですが,御興味があれば動画サイトのコメント機能でコメントで開発者に連絡してみると良いでしょう.
One of its many achievements as ROS being used for more and more robots is that it’s becoming a common language for the robot developers. One estimate (which is actually made by the CEO at OSRF, the maintenance organization of ROS) indicates that the userbase has now well reached 100,000 at the time of 2015 ROSCon. With vast amount of userbase with accumulated information for robot system development, we’re seeing a very successful lifecycle of ROS collectively expanding more info and users.
Still, flesh side of robots – hardware – inevitably differentiates the application level of development per robot, and therefore the conversation among the users of the same robots is valuable. For NEXTAGE Open (Kawada Robotics Inc.), the one that we TORK has been actively maintaining, there are a couple of active forums: discussion can be started at mailing-list and questions at its github.
[github-issues username=”tork-a” repository=”rtmros_nextage” limit=”10″]
Table. Current issues of NEXTAGE Open ROS software on github
Today we have a few videos from researchers from NTU (Nanyang Technological University) (there was one blog post before already) in Singapore that utilize vision input for pick & place application. Code for these app are likely not yet publicized but you can contact the researchers’ group by commenting on each video on the video sharing website.
3周年とサポート・コンサルティングサービスの実績経過TORK’s 3rd year mark and our support/consulting progress
2016年8月8日,おかげさまで TORK は設立3年を迎えました.
ロボティクス技術を使った製品開発に対する世間の関心の高まりに呼応してか,弊社としてもロボットへのオープンソースソフトウェア適用について企業様の関心の高まりを感じる一年でした.2014年度から行ってきた ROS ワークショップ (初級編,中級編等) は引き続き好評を頂き毎月開催しています.
また,創業以来続けさせて頂いているカワダロボティクス様の双腕ロボット NEXTAGE Open 用オープンソースソフトウェアのサポートサービスも順調にご利用頂いています.それに加えこの一年で,新たにロボットの種類を限定せずにお問合せに応えるチケット制コンサルティングサービスを開始し,企業様の多種多様なリクエストにより柔軟にお応えできるよう努めてまいりました.
これらのサポート・コンサルティングサービスはこの1年間で合計72回のお問合せを頂き,94%にあたる68件が解決・終了したか,或いは解法案をご提示済です.分野別では NEXTAGE Open で41件,それ以外の分野でのコンサルティングで31件頂戴しました.1年毎のお問合せ件数ですと,2015年8月時点では46.7件のペースでしたので (参考:昨年同時期の記事によると2014年1月から2015年8月までで74件の問合せ),1.5倍超のペースでお問合せ頂いていることとなります.
コンサルティングサービスの内容は,既存のオープンソースロボットに関するもの (Baxter,Turtlebot,Fetch 等),ROS のモジュールの使い方やカスタマイズ方法,自社開発への ROS 適用上のお悩み等を頂いています.カスタマイズのお問合せが転じてカスタム開発の依頼を頂くケースも出てきました.
これからも,お客様のご要望に応え,産業・学術界でのオープンソースロボティクスの進展に寄与できるよう,より一層努力して参ります.
TORK has just passed 3rd annual mark on August 8th, 2016.
Along with the global trend of robotics business and research boost, we’ve been happilly receiving interests and requests for opensource robotics technology development that we’ve contributed to and have been supporting for since our day 1 in 2013. Our ROS workshop series (beginners,intermediate etc.) are successfully running multiple times every month.
Our ticket-based support service for the dual-arm industrial robot NEXTAGE Open (Kawada Robotics) is growing its user base as well. This year round, in addition, we started opensource robotics consulting service. This new service is not restricted to a certain robot nor technology, but only limitation is “opensource robotics”, so that we can work with corporate engineers and managers for their problems regarding their robotics projects.
During the last 1 year period, we’ve received 72 tickets for total, 41 for NEXTAGE Open and the rest of 31 for other subjects. 68 tickets (94% of overall tickets) are solved/closed or possible solution is proposed to the customers. Compared to the previous year, we’re getting 1.5 times more requests (46.7 tickets/year at Aug 2015 according to the last year’s post).
Thank you all for your business with us, and understanding toward the opensource robotics.
Thank you for the wonderful souvenirs ! お土産ありがとうございます!
We had a meeting with a customer at Hongo, Tokyo.
We received Ebi-sembeis as souvenirs today.
This Ebi-sembeis (shrimp cracker) is a very famous gift in Japan.
Thank you for the wonderful souvenirs !!!
ROS Seminar courses will be held in summer 2016 by TORK in Tokyo, Japan. Any inquiry can be posted at info[a-t]opensource-robotics.tokyo.jp
打ち合わせでお客様からお土産を頂きました.お気遣い頂き恐縮です.
坂角総本舗の海老煎餅です!最高です!!ありがとうございます!!!
いつも以上に仕事を頑張っております!
ROSやオープンソースに関わるコンサルティング,出張ワークショップ,カスタマイズワークショップも承っております.
詳細はWebページをご覧いただくか,メールにてお問い合わせ下さい.
info[at]opensource-robotics.tokyo.jp
ROSを初めて勉強する人へのブログも公開しています. ご参考になさってください.
その他,こういった企画を実施して欲しい等,TORKにやってもらいたいことのご意見ご要望もお待ちしております!
メール以外にもfacebookやtwitterアカウントもございますのでそちらにメッセージ,リプライにてご意見いただくことも可能です.
お気軽にお問い合わせください.

Easy Teaching Operation for NEXTAGE Open by MoveIt! JoystickMoveIt! のジョイスティック機能で NEXTAGE Open を楽々ティーチング
ROS の動作計画アプリ MoveIt! を使った開発を行っている方々の中には,MoveIt! のバイナリ提供は更新が滞ってるから仕方なくソースコードをコンパイル (そしてコンパイルエラーと格闘) して時間を費やしてしまっている方もいるのではないでしょうか.ご安心下さい.最近メンテナンスチームが刷新されソフトウェアの更新が再び活発になってきており,今年に入って既にバイナリは3回更新されました.TORK もメンテナンスに積極的に貢献しています.
当協会のブログでも最近何度か MoveIt! の利用法についてご紹介してきました ([1],[2]).今回も新機能のご紹介です.今日紹介するのはジョイスティックから MoveIt! を制御する方法です.ロボットの動作生成・実行が,今までのように Rviz 上でマウスを使うことなく,ジョイスティックで可能になりました.
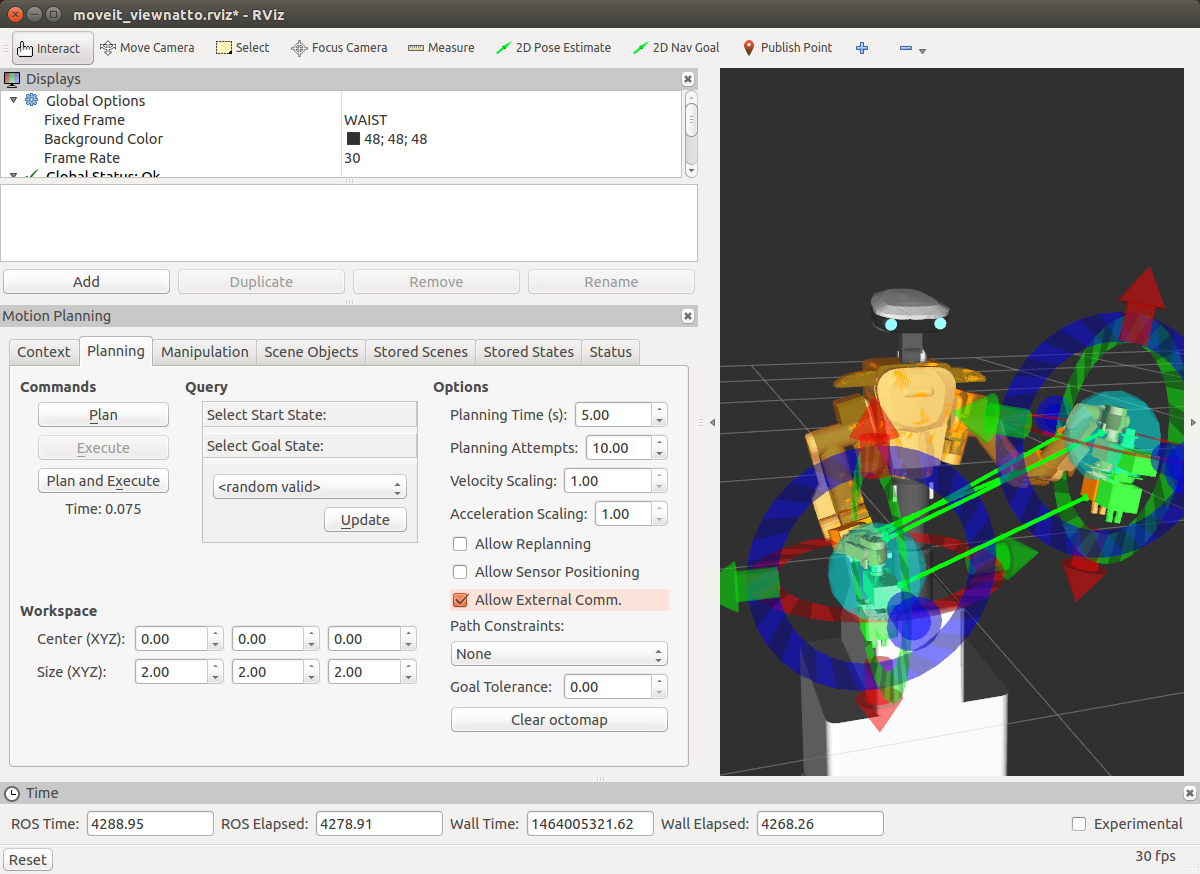
使い方は簡単.ジョイスティックが刺さったマシン上で,図のように Planning タブの AllowExternalExecution にチェックをして下さい.
あとは,以下の launch ファイルを立ちあげればジョイスティックでロボットを動かすことができます.ジョイスティックのコマンド等詳細な利用方法はこちらの WEB ページをご覧ください.
<!-- https://github.com/ros-planning/moveit_setup_assistant/pull/90 -->
<launch>
<arg name="dev" default="/dev/input/js0" />
<!-- Launch joy node -->
<node pkg="joy" type="joy_node" name="joy">
<param name="dev" value="$(arg dev)" /> <!-- Customize this to match the location your joystick is plugged in on-->
<param name="deadzone" value="0.2" />
<param name="autorepeat_rate" value="40" />
<param name="coalesce_interval" value="0.025" />
</node>
<!-- Launch python interface -->
<node pkg="moveit_ros_visualization" type="moveit_joy.py" output="screen" name="moveit_joy"/>
</launch>
また,NEXTAGE Open であれば,MoveIt! が起動している状態で次のコマンドひとつ起動すればジョイスティックが有効になります (jsX の値は変えて下さい).NEXTAGE Open 用の利用法をこちらにも記載しています.
One of good news about ROS community is that the maintenance of MoveIt! got revitalized where TORK is contributing to as well. In 2016 there has already been three binary update releases so far. No more building from source if you were forced to!
We’ve mentioned about MoveIt! a few times recently ([1],[2]), so do we today again. With the version 0.7.2 (on ROS Indigo), you can operate robot arms by joystick via MoveIt!
Running the feature is as simple as joystick. On RViz on the host where the joystick is plugged, check “Planning” tab –> “AllowExternalExecution” (see the image below).
Then run a launch file, either the one in your XXXX_moveit_config package if there’s already the aforementioned launch file, or simply make a launch file with the following:
<!-- https://github.com/ros-planning/moveit_setup_assistant/pull/90 -->
<launch>
<arg name="dev" default="/dev/input/js0" />
<!-- Launch joy node -->
<node pkg="joy" type="joy_node" name="joy">
<param name="dev" value="$(arg dev)" /> <!-- Customize this to match the location your joystick is plugged in on-->
<param name="deadzone" value="0.2" />
<param name="autorepeat_rate" value="40" />
<param name="coalesce_interval" value="0.025" />
</node>
<!-- Launch python interface -->
<node pkg="moveit_ros_visualization" type="moveit_joy.py" output="screen" name="moveit_joy"/>
</launch>
For the detail follow the usage page.
To run on NEXTAGE Open, make sure MoveIt! is running then run a single command below (modify jsX). You can also refer to wiki for joystick usage for NEXTAGE Open.
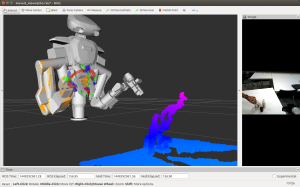
roslaunch nextage_moveit_config joystick_control.launch dev:=/dev/input/js1
(At the top window, the human operator plans the movement on RViz visualizer. Once the plan looks good then operator executes the plan so that the simulated robot in the bottom window conducts the movement. This is a screen capture so joystick isn’t invisible, but yes, all the robot’s movement is commanded from a Sony PS3 joystick.)
Thanks to opensource community, issue with NEXTAGE Open software (3D model geometry, tf) got resolved promptlyNEXTAGE Open ソフトウエアに不具合,オープンソースコミュニティにより迅速に修正完了 (3D モデル,tf の問題)
ユーザからの報告により NEXTAGE Open の tf の挙動に問題点がみつかりました.既に修正版をバイナリ (Ubuntu の apt-get でインストールする版のことです) で提供しています.修正版の適用方法等,詳しくは告知をご覧下さい.
製品のソフトウェアをオープンソースにするメリットの一つは,テストし報告してくれる人を多く集められることにあると,TORK は考えています.今回はまさにソフトウェアをオープンソースにしていたから起こり得た問題解決でした.解決までの流れはまさにオープンソースコミュニティのそれで,異なる組織から意見が共有された結果として,迅速に解決することができました;本問題現象を議論する github 上のチケットを時系列で追っていくと:
- ユーザが問題点を指摘
- –> メーカ開発者からコメント
- –> 別の組織のユーザからもコメント
- –> メンテナンス元 (我々です) が修正候補を作成
- –> ユーザが修正候補をテストし問題が修復されることを確認
- –> メンテナンス元修正候補が採用
4つの組織から一週間程度の間に意見が出され,解決にたどり着いているのがわかります.そしてこの特定の問題に義務がある人は (我々以外は) 居ないのです.これだけクイックに組織の壁を超えた問題解決が行えるのはコミュニティがオープンになっているからこそではないでしょうか.
更にその後のバイナリ作成と公開は,(これまで通り) ROS 管理チーム (OSRF) が運営するネット上の仕組みを利用させてもらっています.そこに至る手順は至ってシンプル (*1):
TORK は,ソフトウェアを公開することで,企業様が開発を加速し品質を高めていくことができると信じて,日々オープンソースに貢献しています.
*1 初回公開時にはやや長いプロセスを経る必要があります.しかしひとたび公開作業が終了すれば,その後の更新版の公開は上に書いたようにいたって簡単です.
A user reported an issue in tf with NEXTAGE Open software that got resolved in a quick fashion thanks to opensource collaboration across organizations/userbases. Binaries (the ones installable by apt-get) including the fix is already available online. Please see more detail of the issue and how to apply the fix this ticket on github.
We, TORK, thinks without any doubts that the big advantage of making software public is that you get testers from across the globe. The fix this time is a true realization of this opensource dogma; if I review the ticketed report for this issue on github now, you’ll see the flow:
- A user reported the issue.
- –> Someone from robot’s manufacturor gave a comment.
- –> Another heavy user commented.
- –> Maintainer (us) created a fix candidate.
- –> Reporter user tested fix candidate and confirmed that it fixes.
- –> Maintainer pulled in the fix.
At least four persons from different organizations contributed so far up to this point, within only a week timeframe. And everybody is not obligated to this ticket (but us).
Going further, once the fix is pulled then it’s also important to make the fix easily accessible by the users. Having them as binary form is the way to go. We do that by relying on the platform the ROS maintenance team (OSRF) runs, as have we already done so. Steps for that is really simple (*1):
- Submit a request for generating a binary (submission from this time)
- –> Announcement by OSRF that the binaries are ready (announcement made this time by OSRF)
TORK believes that opensource software development contributes to improving quality and fastening the engineering cycle for the corporations. That’s why we have and will continue contribution to the opensource community.
*1 Initial release takes a bit more steps. But once done so it’s really easy!
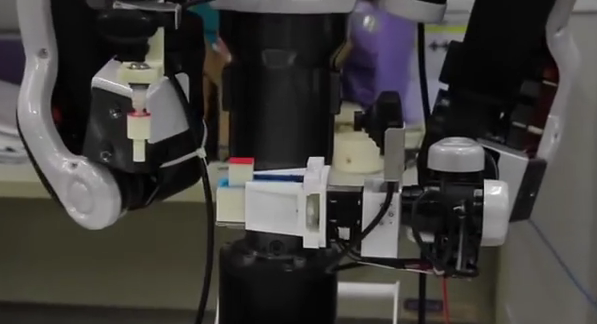
Real-time Impedance Control on NEXTAGE Open Dual-arm Robot Using Dynpick F/T Sensor双腕ロボット NEXTAGE Open での実時間 impedance 制御が Dynpick F/T センサにも対応
カワダロボティクス社製の双腕ロボット NEXTAGE Open (/ Hironx) の力センサを用いた実時間制御は以前のブログ記事でお伝えしました.当時の例で用いていた JR3 力センサは日本国内では販売が終了 (*1) していますが,今回日本国産,ワコーテック社の Dynpick センサに対応しました.

Dynpick 小型静電容量型6軸力覚センサ (画像元)
https://www.youtube.com/watch?v=USp4H2MVRQs&feature=youtu.be
実装上の留意点が幾つかあります:
- 現状では wdf-6m200-3 (廃番,USB-Serial 接続) にのみ対応しています.同社の新型製品 (USB-Serial ではない) ではドライバの都合でそのままでは本機能はおそらくつかえません.
- 本機能の適用には QNX ライセンスに基づいたコントローラボックス上のソフトウェアの改変が必要なのと,ノウハウが必要なのとで,適用方法は公開しておりません.
FAQs:
- Q: F/T センサを追加で装着しても,装着前に使っていたグリッパは使えますか? A: はい,問題ありません.気をつけるべきは,キネマティクスが変わるのでロボットの3次元モデルをセンサを含めるよう更新が必要となります.また,センサ装着,グリッパの再装着等の据付作業はお客様御自身で行って頂くこととなります.
- Q: 配線変更やケーブル追加,その他電子機器の追加設置は必要になりますか? A: はい,F/T センサとその出力をを処理するコンピュータとの通信のために必要です. なお本ページ中で取り上げている JR3・Dynpick は USB/RS232C を使います.
- Q: F/T センサを Ubuntu に接続してインピーダンス制御機能を利用できますか? A: Dynpick の場合,はい,ただし得られる結果は要件により異なります.Dynpick には ROS で使える Ubuntu 用デバイスドライバパッケージが無償入手でき,デバイスを繋げばすぐ使いはじめることが出来るのですが,Ubuntu は基本的にはリアルタイム性を担保しないため,やや限定的となります.本ページでご紹介しているのは F/T センサを QNX に接続し,そのリアルタイム機能を活かす方法です.インストール方法が複雑となります.
- Q: インピーダンス制御機能の導入費用は? A: TORK サポート窓口までお問合せ下さい.
なお本件に関わるソースコードの公開は,株式会社豊田中央研究所様の御厚意により実現しています.
*1 米国メーカ JR3 Inc. は今日現在存続しています.連絡したら返信も返ってきました.
Earlier this year we mentioned that for Kawada’s industrial dual-arm robot NEXTAGE Open (/ Hironx), a force-torque sensor “JR3” can be integrated into its real-time control loop. Now that then-sales agency discontinued import so that JR3 becomes not easily available for Japanese users, another sensor support has been desired. Recently we’ve added Wacohtech’s Dynpick to the lineup.
“Dynpick” Miniature capacitive 6-axis force sensor (image source)
https://www.youtube.com/watch?v=USp4H2MVRQs&feature=youtu.be
To implement the necessary changes, a few thiings to be noted:
- Currently only the product wdf-6m200-3 is tested (discontinued,USB-Serial), and other newer type of Dynpick products shouldn’t work as it is, since some tweaks are most likely needed for them to work on QNX.
- Because the work requires modification on the software on ControllerBox (QNX), we have no plan so far to write publicly about how to apply the change.
FAQs:
- Q: Can the same gripper be used after F/T sensor attached? A: Yes, no problem. Robot’s kinematics changes, however, so updating robot’s 3D model will be necessary. Attaching the F/T sensor and re-attach the gripper is your responsibility.
- Q: Is adding/changing cabling or electronics to provide communication between sensor and the robot necessary? A: Yes, for the communication between the F/T sensors and the computer. JR3 and Dynpick are USB/RS232C.
- Q: Can the F/T sensor be connected to Ubuntu for impedance controller feature? A: Depending on the requirement of your application. Dynpick has a device driver package for ROS that works on Ubuntu This works out-of-the-box, but Ubuntu is not a real-time OS perse by default. The solution explained on this page is to connect the sensor to QNX to take advantage of its real-time capability. Installation isn’t easy as mentioned earlier.
- Q: How much is the cost to activate the impedance control? A: Please contact us.
The opensource contribution of this project was realized thanks to Toyota Central R&D Labs., Inc..
ROS Workshop at Municipality相模原ロボット制御用オープンソース講習会を開催しました
We held ROS Workshop at Sagamihara ROBOT SUPPORT CENTER (SIC) and Okada-Lab at Tamagawa University on 16th, 30th Jan, and 6th Feb.
SIC is an industrial training facility in the city of Sagamihara in Kanagawa prefecture, where global and local businesses are located in electronics and heavy industry. The center aims to assist the local economy by providing training and support for the robotics technologies.
We, TORK, have been holding technical workshop for opensource robotics for several dozen times at different levels (this, this, this, and this to name a few). This time we worked with SIC to give a series of dedicated workshop for the engineers and managers from the local tech companies.
The contents consists of following three parts. We also would like to thank to students from Okada-Lab@Tamagawa University for their assistance.
- 1. ROS Workshop for beginners.
- Learning basics of ROS system through the hands-on workshop.
- ROS Setup
- Recognition human hand with vision sensor(LeapMotion)
- Recognition based motor control
- Learning basics of ROS system through the hands-on workshop.
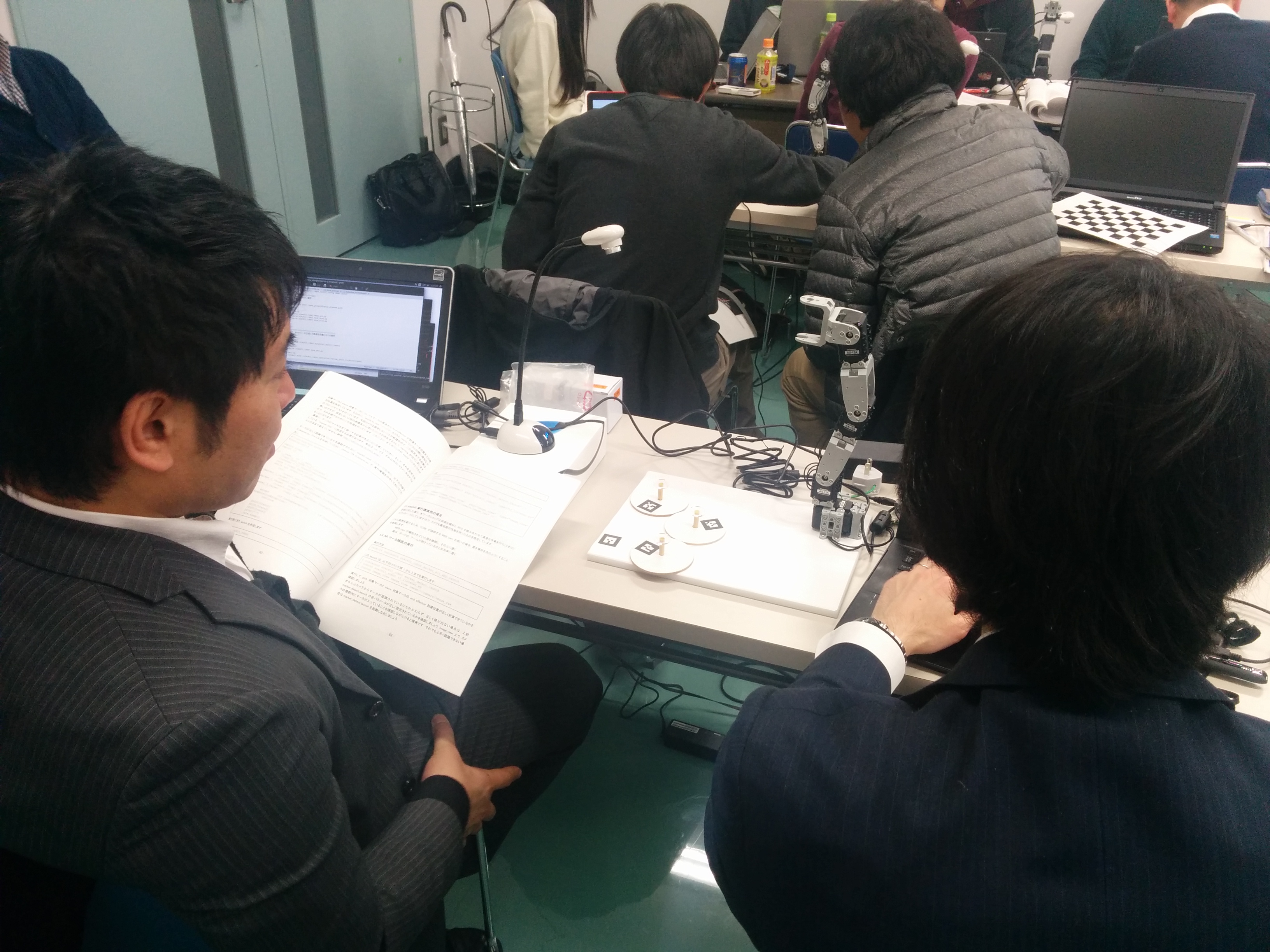
- 2. ROS Workshop for intermediates
- Learning how to control original robot arm. This tutorial uses original manipulator using Dynamixel servo motors. Learn how to create URDF model and MoveIt Setup.
- Robot arm modeling and visualization
- Connecting real robot and robot on rviz
- Control simulated robot on rviz using MoveIt!
- Control real robot using MoveIt!
- Recognizing AR marker and transformations
- Wringing vision based robot motion control program
- Learning how to control original robot arm. This tutorial uses original manipulator using Dynamixel servo motors. Learn how to create URDF model and MoveIt Setup.
- 3. ROS + Nextage/HIRO Dual-arm robot
- Learning ROS and OpenRTM using HIRO robots, including how to plan motions using MoveIt!, using Kinect Depth sensor for realtime obstacle avoidance, grasping object using hand-eye cameras.


1月16日,30日,2月6日と,三回にわたって相模原ロボット導入支援センター様および玉川大学岡田研究室にてロボット制御用オープンソース講習会を開催しました.
内容は以下の三回構成.地域の経営者,技術者の皆さんにオープンソースのロボット制御方法を学んでいただきました.玉川大学の岡田研究室の学生の皆さんに運営サポートで参加していただき大変助かりました.ご参加いただいた皆様,運営の皆様,玉川大学岡田先生と学生の皆さん,お疲れ様でした.ありがとうございました!
- 第一回( ROSワークショップ初級編)
- ロボットの基本ソフトである ROS の概要を基礎から紹介する.ワークショップを通して手を動かしROSの概要を知る.ROS を使ったプロジェクトを始めようと考えている初学者に適している.
- ROS 開発環境設定
- 認識センサ(LeapMotion)を用いた手の検出プログラム
- 認識に基づくサーボモータ制御
- ロボットの基本ソフトである ROS の概要を基礎から紹介する.ワークショップを通して手を動かしROSの概要を知る.ROS を使ったプロジェクトを始めようと考えている初学者に適している.
- 第二回(ROSワークショップ中級編)
- オリジナルのロボットアームを作成して動かす場合に必要な知識の獲得を目的とする.具体的には,Dynamixel サーボモータを使用した4軸ロボット「StackIt!」により,マーカのついたパックの pick&place を通じてロボットモデル(URDF)の作成方法や MoveIt! の設定方法を学ぶ.
- ロボットアームのモデル作成と表示
- 実物のロボットとシミュレータ(RViz)上のロボットの接続
- MoveIt! を使ってシミュレータ(Rviz)上のロボットを動かす
- MoveIt! を使って本物のロボットを動かす
- カメラによる AR マーカの認識と座標変換
- ロボットの動作プログラムの作成
- オリジナルのロボットアームを作成して動かす場合に必要な知識の獲得を目的とする.具体的には,Dynamixel サーボモータを使用した4軸ロボット「StackIt!」により,マーカのついたパックの pick&place を通じてロボットモデル(URDF)の作成方法や MoveIt! の設定方法を学ぶ.
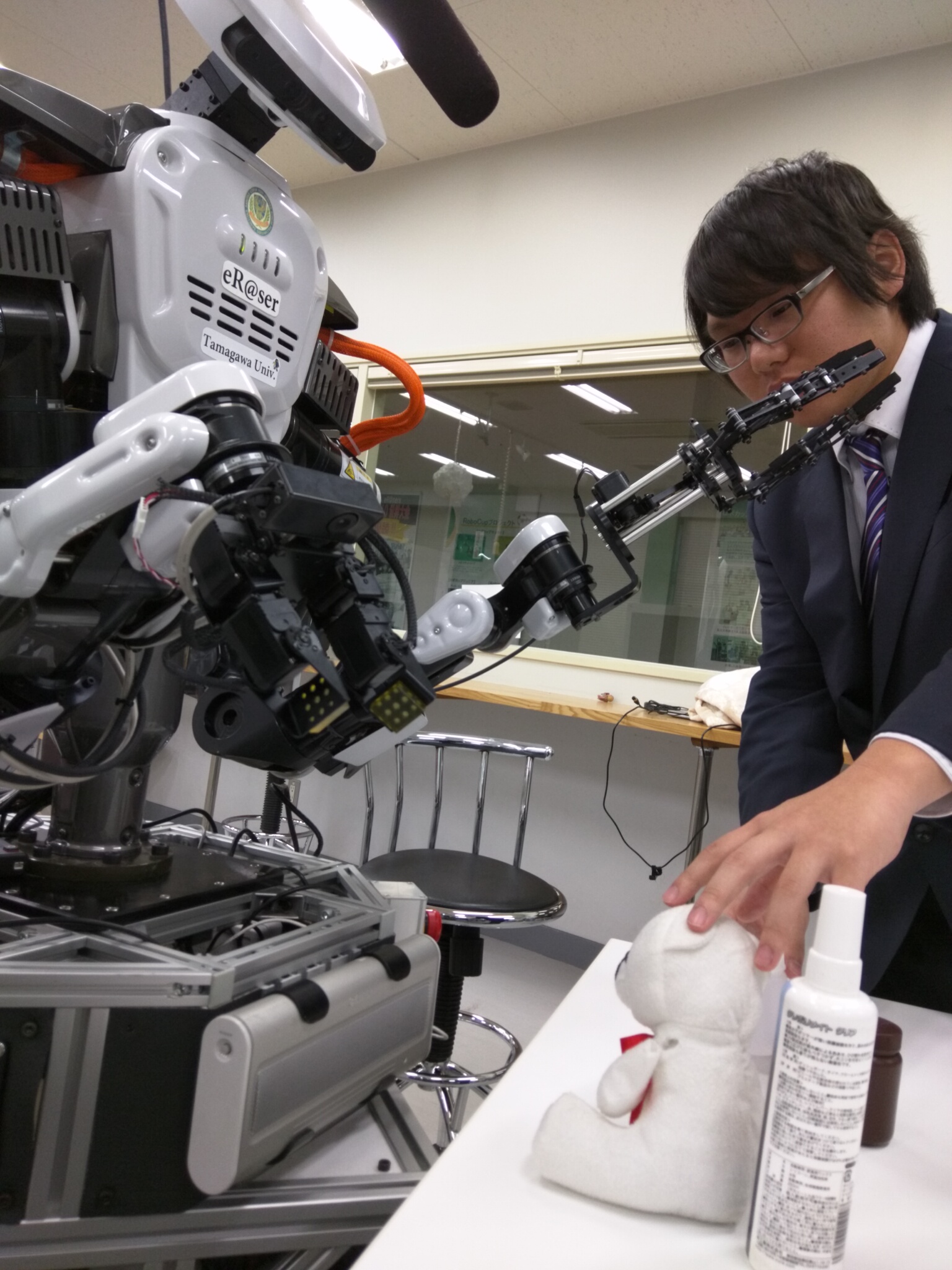
- 第三回(ROS+HIROセミナー特別編)
- ロボット制御用のオープンソースソフトウェア ROS と OpenRTM を用いたロボットの動作例として双腕ロボット.動作計画ツール MoveIt!,体外に設置した点群カメラを用いた障害物を考慮した動作生成や,手先カメラで認識したマーカを掴む等,既存ユーザから要望の高い認識を用いたアプリケーション例を体験する.
NEXTAGE Open in Singapore[ユーザ事例] NEXTAGE Open @ シンガポール
NEXTAGE Open (Hironx) を利用されているユーザ様事例を紹介します.
ROS をサポートしている NEXTAGE Open (カワダロボティクス社) は海外ユーザにも好評です.最近の大学ランキングでは京大,東大よりも上位で評価されている Nanyang Technological University (NTU) もその一つ.
NEXTAGE Open を使ってティーチングシステムの研究をされています.
TORK は NEXTAGE Open のオープンソース・ソフトウェアに関するサービスを行っております.
Let’s look at another usecase of NEXTAGE Open (Hironx), this time from Singapore.
ROS-capable dual-arm robot NEXTAGE Open (Kawada Robotics) has got a momentum over the world and south-east Asia isn’t an exception. At Nanyang Technological University (NTU), one of the most prominent research institutes, researchers are working on teaching system.
TORK has been providing software solution for NEXTAGE Open.
[ユーザ事例] NEXTAGE Open Xtion センサヘッドNEXTAGE Open Xtion sensor head
NEXTAGE Open (Hironx) を利用されているユーザ様事例を紹介します.
玉川大学岡田浩之研究室様のロボットは,頭部のカメラを Asus 社の Xtion PRO LIVE (RGB-Dセンサ) に換装しポイントクラウド処理を実現されています.このための launch ファイルも公開済み.カメラを覆う頭部のカバーは NEXTAGE Open / Hironx の Xtion ユーザ向けに私達 TORK が製作・販売しています.
NEXTAGE Open で実世界認識処理に興味をお持ちの方は是非お試し下さい.
Another usecase of NEXTAGE Open (Hironx) is up!
Hironx at Hiroyuki Okada’s lab at Tamagawa University in Japan exchanged her/his head with the custom cover that is tailor-made for Asus’ Xtion PRO LIVE (RGB-D sensor) for point cloud application. ROS launch file configured for Hironx robot is opensourced as well.
Enjoy the real world perception application with NEXTAGE Open / Hironx, and if you’re interested in this custom head mount where Xtion camera nicely resides in, please contact us.

(頭部の中に組み込まれているのが RGB-D センサ,その上に付いているのはマイクです.マイクは岡田研究室の特別仕様品)
# RGB-D sensor is embedded inside of the head-mount and a custom microphone sits on its top.
[ユーザ事例] 双腕ロボットでの Impedance 制御
NEXTAGE Open (Hironx) を利用されているユーザ様事例を紹介します.
産業技術総合研究所マニピュレーション研究グループ様のロボットは,手先にJR3社製の6軸力センサ を取り付けており,センサが計測する外力に応じて手先の位置姿勢を制御する Impedance 制御を実現されています.この Impedance制御の設定,制御方法はチュートリアルとして公開していますので,力センサ付きの NEXTAGE Open をお持ちの方は是非お試し下さい.