ROS Workshop at Municipality相模原ロボット制御用オープンソース講習会を開催しました
We held ROS Workshop at Sagamihara ROBOT SUPPORT CENTER (SIC) and Okada-Lab at Tamagawa University on 16th, 30th Jan, and 6th Feb.
SIC is an industrial training facility in the city of Sagamihara in Kanagawa prefecture, where global and local businesses are located in electronics and heavy industry. The center aims to assist the local economy by providing training and support for the robotics technologies.
We, TORK, have been holding technical workshop for opensource robotics for several dozen times at different levels (this, this, this, and this to name a few). This time we worked with SIC to give a series of dedicated workshop for the engineers and managers from the local tech companies.
The contents consists of following three parts. We also would like to thank to students from Okada-Lab@Tamagawa University for their assistance.
- 1. ROS Workshop for beginners.
- Learning basics of ROS system through the hands-on workshop.
- ROS Setup
- Recognition human hand with vision sensor(LeapMotion)
- Recognition based motor control
- Learning basics of ROS system through the hands-on workshop.
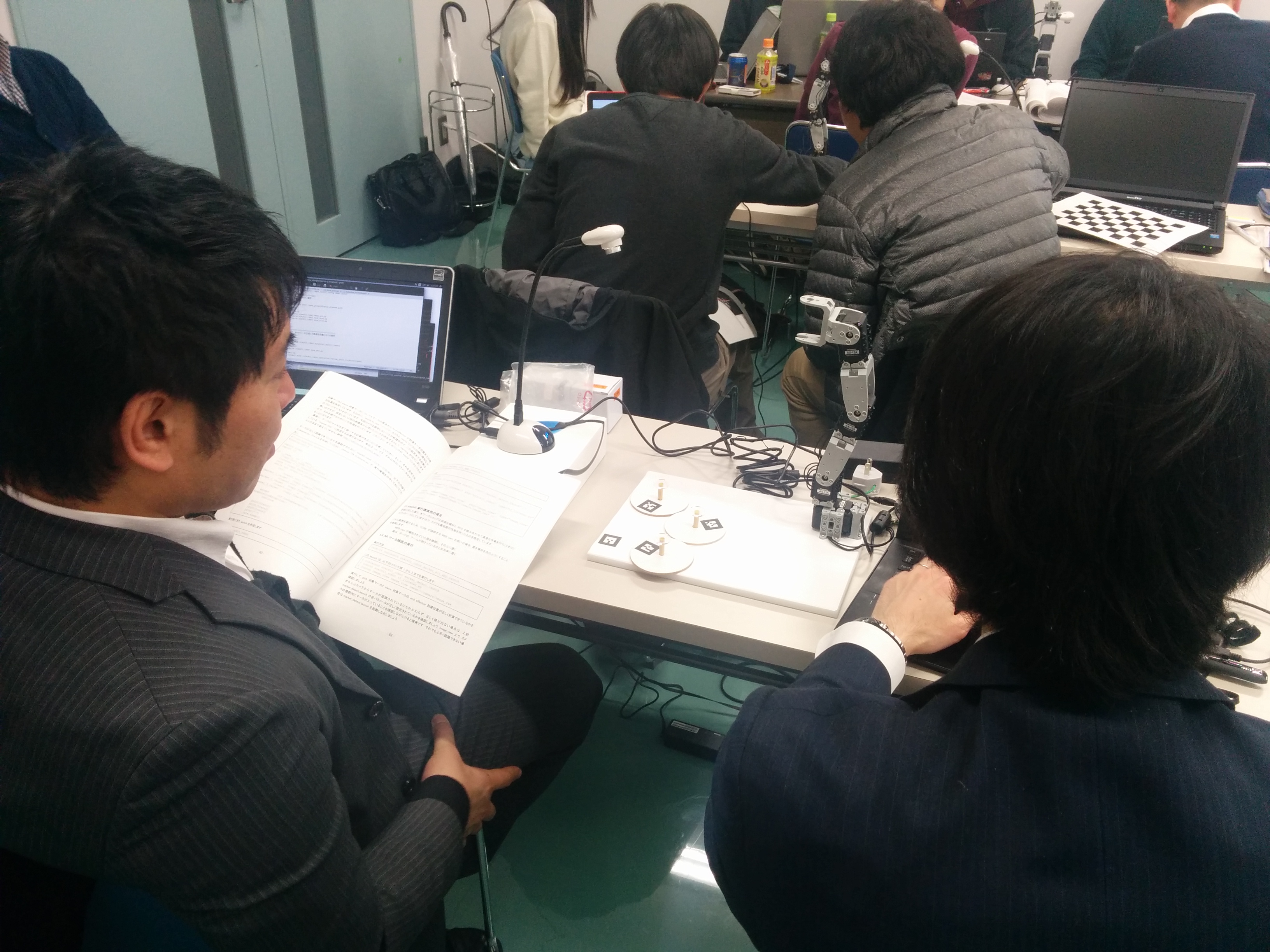
- 2. ROS Workshop for intermediates
- Learning how to control original robot arm. This tutorial uses original manipulator using Dynamixel servo motors. Learn how to create URDF model and MoveIt Setup.
- Robot arm modeling and visualization
- Connecting real robot and robot on rviz
- Control simulated robot on rviz using MoveIt!
- Control real robot using MoveIt!
- Recognizing AR marker and transformations
- Wringing vision based robot motion control program
- Learning how to control original robot arm. This tutorial uses original manipulator using Dynamixel servo motors. Learn how to create URDF model and MoveIt Setup.
- 3. ROS + Nextage/HIRO Dual-arm robot
- Learning ROS and OpenRTM using HIRO robots, including how to plan motions using MoveIt!, using Kinect Depth sensor for realtime obstacle avoidance, grasping object using hand-eye cameras.


1月16日,30日,2月6日と,三回にわたって相模原ロボット導入支援センター様および玉川大学岡田研究室にてロボット制御用オープンソース講習会を開催しました.
内容は以下の三回構成.地域の経営者,技術者の皆さんにオープンソースのロボット制御方法を学んでいただきました.玉川大学の岡田研究室の学生の皆さんに運営サポートで参加していただき大変助かりました.ご参加いただいた皆様,運営の皆様,玉川大学岡田先生と学生の皆さん,お疲れ様でした.ありがとうございました!
- 第一回( ROSワークショップ初級編)
- ロボットの基本ソフトである ROS の概要を基礎から紹介する.ワークショップを通して手を動かしROSの概要を知る.ROS を使ったプロジェクトを始めようと考えている初学者に適している.
- ROS 開発環境設定
- 認識センサ(LeapMotion)を用いた手の検出プログラム
- 認識に基づくサーボモータ制御
- ロボットの基本ソフトである ROS の概要を基礎から紹介する.ワークショップを通して手を動かしROSの概要を知る.ROS を使ったプロジェクトを始めようと考えている初学者に適している.
- 第二回(ROSワークショップ中級編)
- オリジナルのロボットアームを作成して動かす場合に必要な知識の獲得を目的とする.具体的には,Dynamixel サーボモータを使用した4軸ロボット「StackIt!」により,マーカのついたパックの pick&place を通じてロボットモデル(URDF)の作成方法や MoveIt! の設定方法を学ぶ.
- ロボットアームのモデル作成と表示
- 実物のロボットとシミュレータ(RViz)上のロボットの接続
- MoveIt! を使ってシミュレータ(Rviz)上のロボットを動かす
- MoveIt! を使って本物のロボットを動かす
- カメラによる AR マーカの認識と座標変換
- ロボットの動作プログラムの作成
- オリジナルのロボットアームを作成して動かす場合に必要な知識の獲得を目的とする.具体的には,Dynamixel サーボモータを使用した4軸ロボット「StackIt!」により,マーカのついたパックの pick&place を通じてロボットモデル(URDF)の作成方法や MoveIt! の設定方法を学ぶ.
- 第三回(ROS+HIROセミナー特別編)
- ロボット制御用のオープンソースソフトウェア ROS と OpenRTM を用いたロボットの動作例として双腕ロボット.動作計画ツール MoveIt!,体外に設置した点群カメラを用いた障害物を考慮した動作生成や,手先カメラで認識したマーカを掴む等,既存ユーザから要望の高い認識を用いたアプリケーション例を体験する.
Kei Okada administrator
著者について