
World MoveIt Day 2019 in Tokyoが開催されました!
11月20日に,World MoveIt Day 2019 in Tokyoが開催されました! 当日の様子を写真をたくさん載せながらレポートしたいと思います.参加できなかった方もWorld MoveIt Dayの雰囲気を感じていただけると幸いです.当日の実施したスケジュールをたどりながら記事にしたいと思います.
会場
外の様子
会場は株式会社オムロンサイニックエックス様のオフィスでした.オフィス玄関,エレベータ,会場などにTORK作成のWorld MoveIt Dayのポスターを貼って雰囲気を盛り上げました.

会場内
会場したときの写真です.オムロンサイニックエックス様のご提供の会場はおしゃれなオフィスでした.参加者みなさん,それぞれ開発の準備をしています.

開会
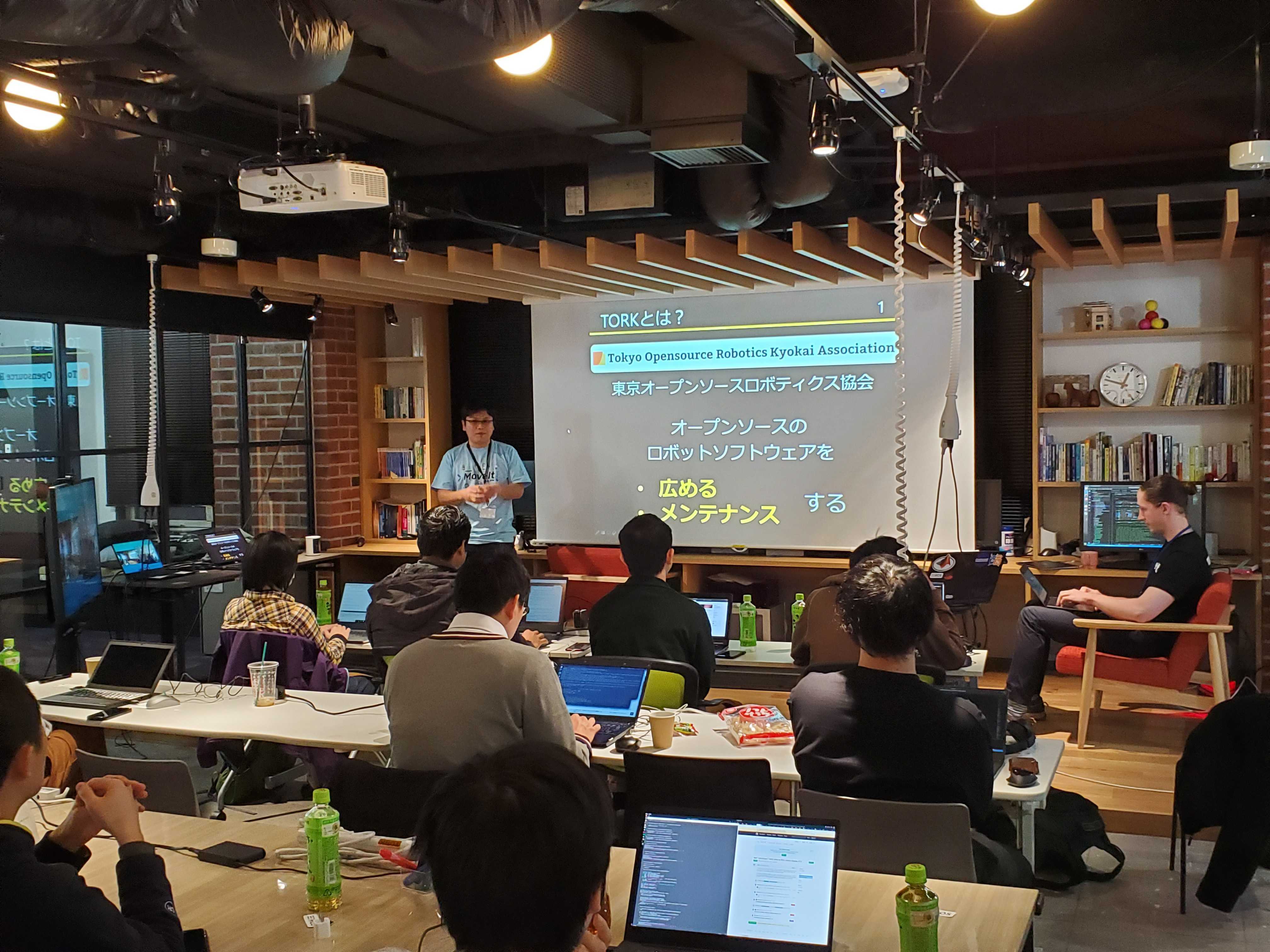
TORKよる開会の挨拶がありました.1日の日程の説明を行いました.
ハッカソン
早急に開会の挨拶を終了し,ハッカソン開始!みなさんそれぞれの課題を見つけ開発を行います.わからないことがあれば,スタッフに積極的に質問してくださったり,参加者同士で助け合ったりと良い雰囲気でした.

昼食
昼食はTORKの提供でした.ごはんをしっかり食べて午後からも頑張れそうです!!

スポンサープレゼン
お昼ごはんを食べながら,主催者によるスポンサープレゼンがありました.
オムロンサイニックエックス
オムロンサイニックエックスのフェリクスさんからのスポンサープレゼンが実施されました.オムロンサイニックエックスとしての活動,MoveItの開発スケジュールなどの説明がありました.

TORK
TORKから,TORKの会社説明,活動(セミナー,トレーニング教材の作成,MoveItへのコミット)などを説明しました.
ハッカソン
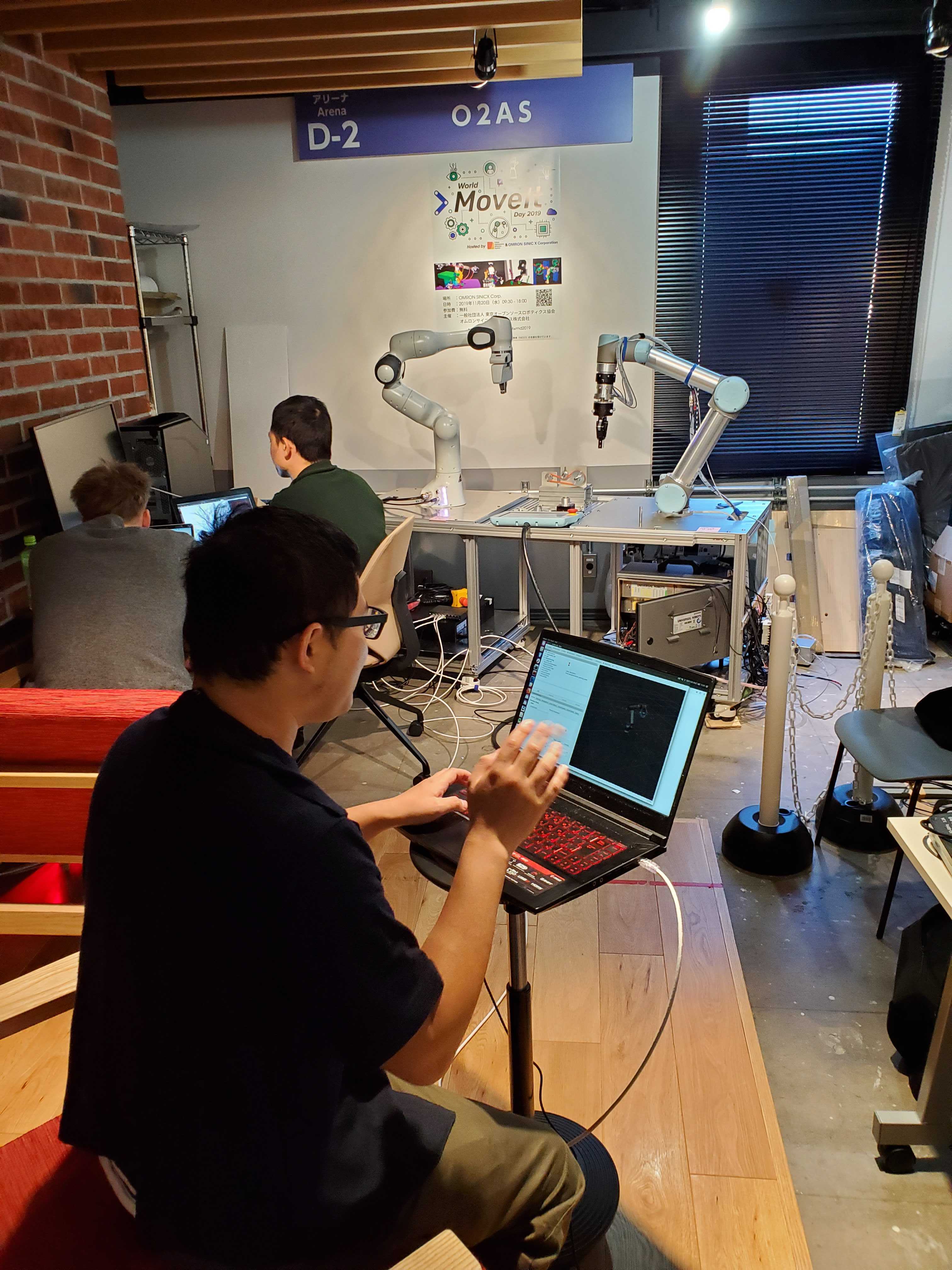
午後もハッカソンが続きます.午後には事前に用意していたロボットを参加者さんが動かせるようになりました.そのときのトラブル事例などをシェアしたりと,開発者同士の積極的な交流がありました.またホワイトボードに今実施している内容(Issue番号なども)を書き出したりしました.
参加者による発表
夕方17時から,今日一日の成果発表です.参加者皆さん,今日一日やったことを発表するスタイルでした.「私のやったことなんて…」みたいなことがなく,互いの成果を称え合うすばらしい時間だったと思います.たくさんの発表があったので,一部だけご紹介します.
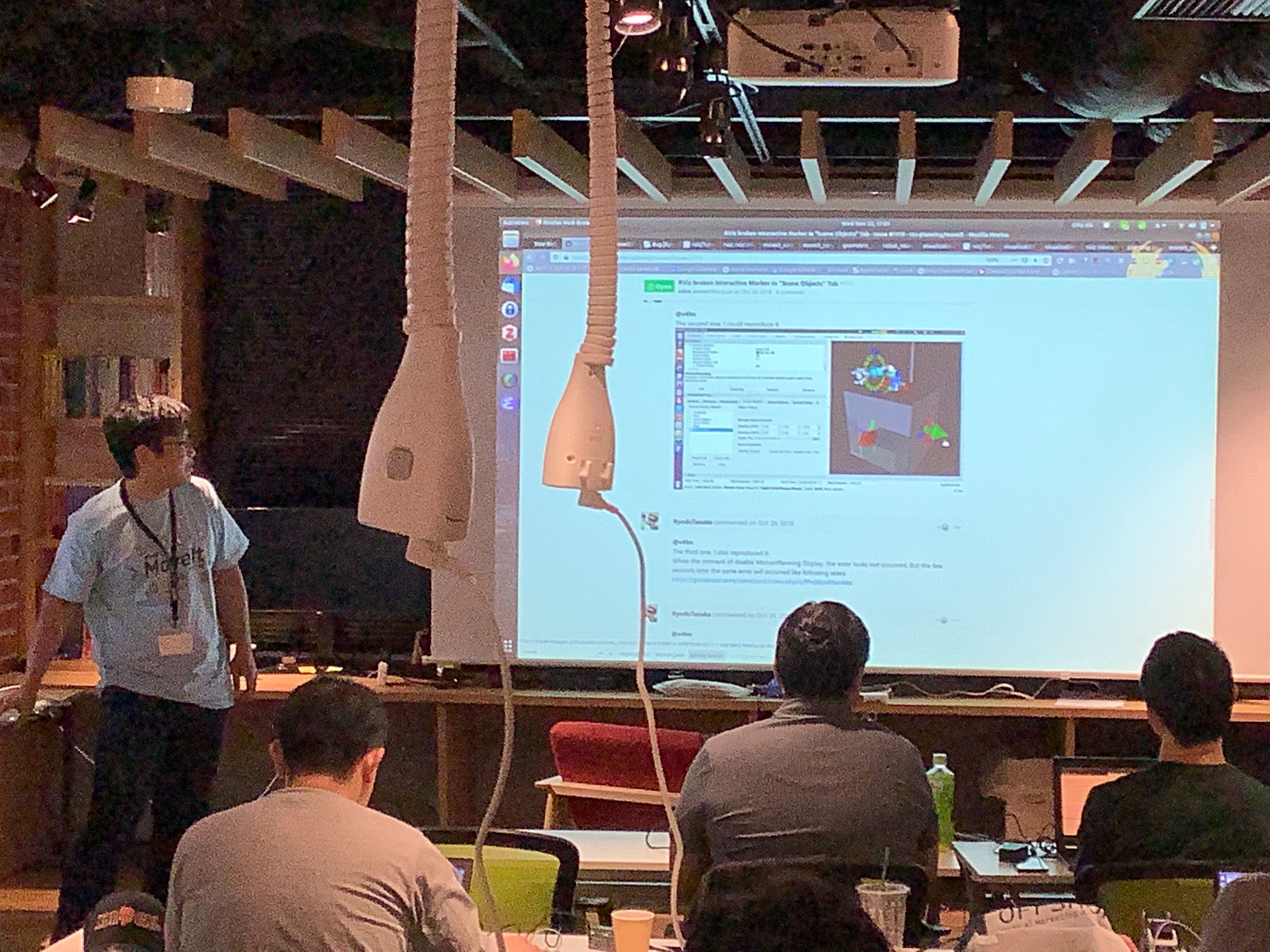
MoveItプラグイン上の不具合
MoveItプラグインのScene Objectsの設定画面にて,各Sceneに紐付けられたインタラクティブマーカのサイズがおかしいという問題をTORK から発表しました.当日は間に合いませんでしたが,その後問題を解決し,Pull Request を本家リポジトリへ出し,現在 merge を待っています.
RViz broken Interactive Marker in “Scene Objects” Tab #1115
https://github.com/ros-planning/moveit/issues/1115
Add interactive marker resizing #1795
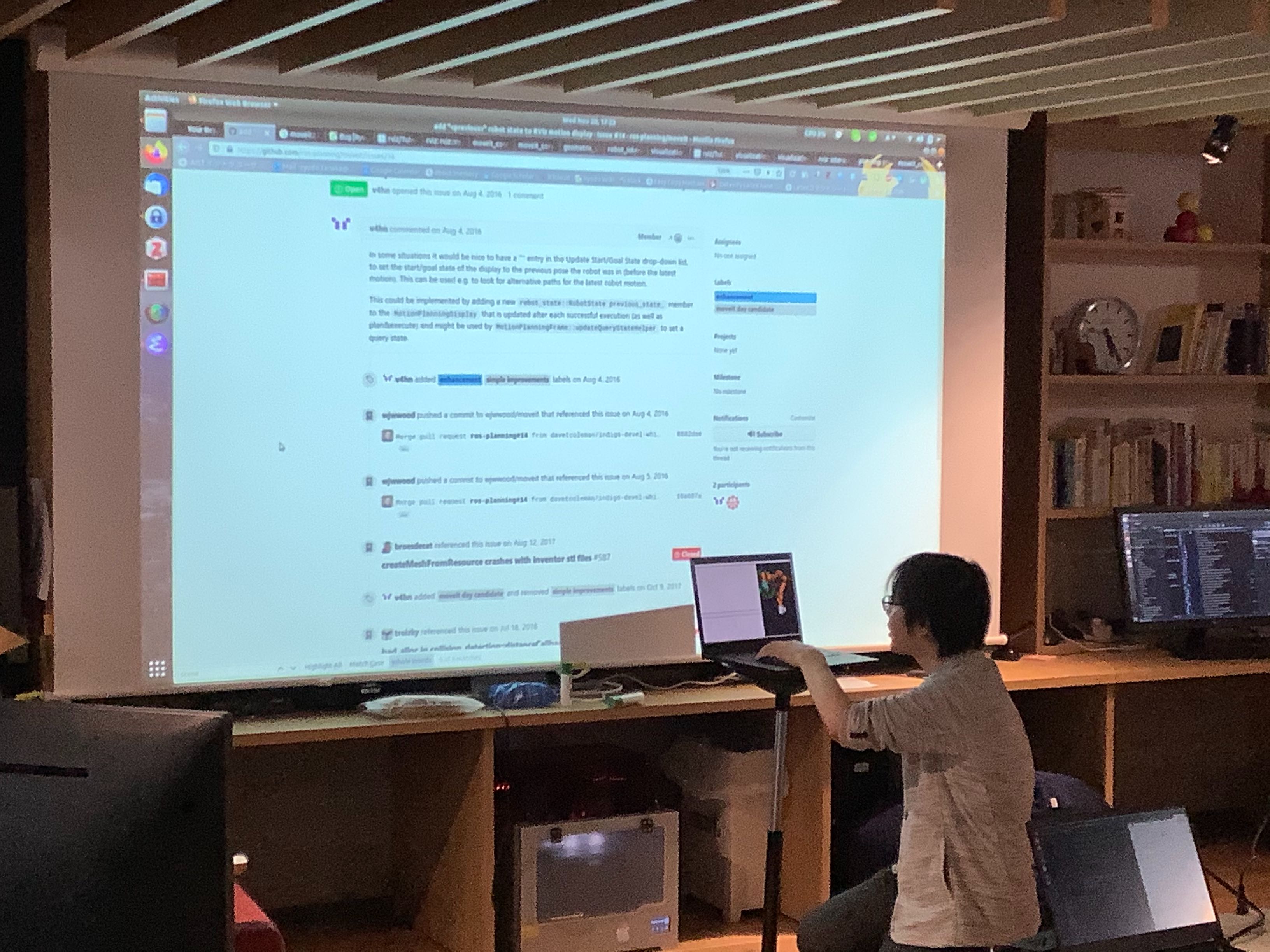
Previousの実装
MoveItプラグインで,ロボットの開始終了姿勢を指定するときにCurrentという設定があると思います.それに追加で,Previousを実装したという発表でした.これによって,プランニング実行後,更にプランニングを行う場合,以前の姿勢を目標姿勢に設定することができます.なんとこの成果はMoveItのマスターブランチにマージされました!!すばらしいです.
add “<previous>” robot state to RViz motion display #14
MoveIt チュートリアルの日本語化
MoveItチュートリアルの日本語化を現在取り組んでいます.その一部を2名の方に手伝ってもらいました!ありがとうございます.
Japanese Translation #415

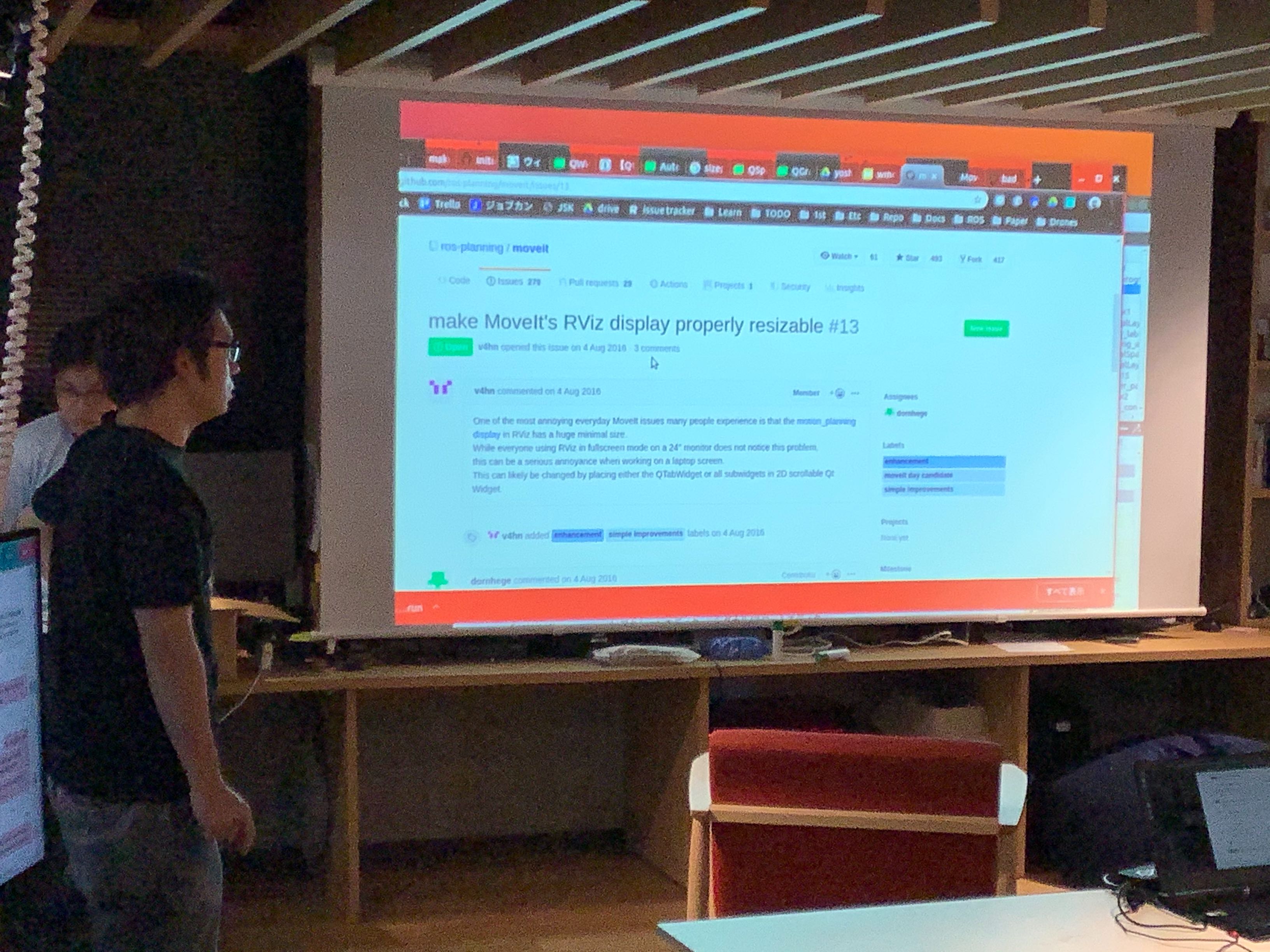
プラグインのサイズ調整
MoveItのプラグインは横幅のサイズが固定で.ディスプレイサイズが小さいとRvizを専有してしまいます.このIssueに取り組んでくださいました.
make MoveIt’s RViz display properly resizable #13
xArmの動作デモ
ロボットを持ち込んで参加してくださった方々もいらっしゃいました.xArmの動作デモを実施していただきました.xArmの実物を見たことがなかったので,新鮮でした!
本日はWorld MoveIt Day2019に参加してます.xArmというロボットを持参してます!#WMD2019 #ROS pic.twitter.com/xbyhz5d8Wu
— Connected Robotics Inc (@CROctoChef) 2019年11月20日

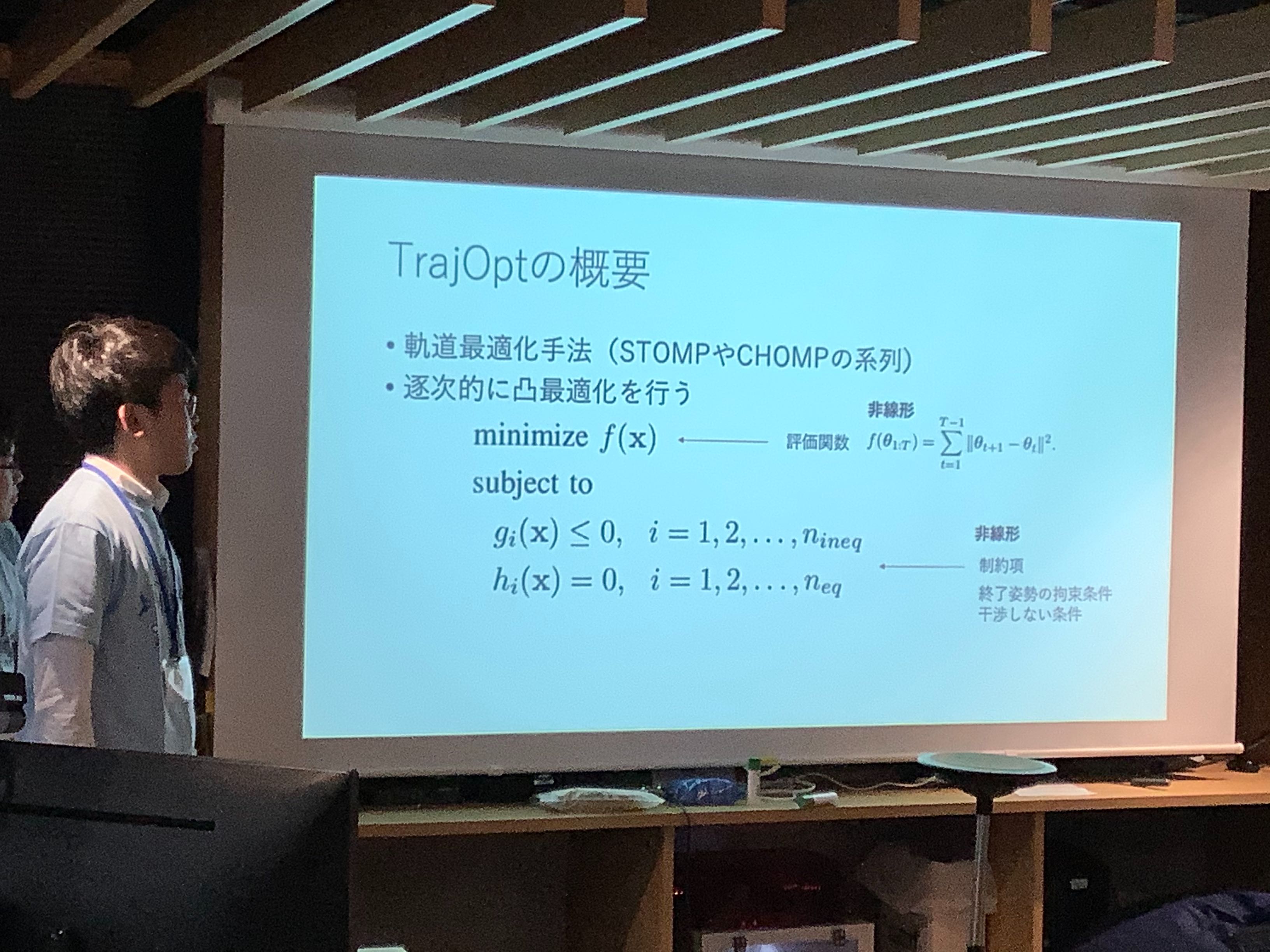
TrajOptについて
TORKからMoveItの新しいプランナであるTrajOptの説明を行いました.WMD当日時点では,TrajOptの機能はプルリクエストがあがっていますが,動作しなかったので,そのプルリクエストの内容のレビューを実施しました.WMDの時間内でなんとかプランニングを実行することまではできるようになりました.
Trajopt with no dependency to tesseract #1626
他にもたくさんの発表がありました
発表時間には多くの発表があり,この記事のボリュームの関係で紹介しきれなかったものもたくさんあります.発表してくださった方にはMoveItステッカーやTORK作成のMoveIt DayのTシャツをプレゼントさせていただきました.

記念写真
集合写真
集合写真もとりました.途中からの参加や,途中でお帰りになった方もいらっしゃいますが,定員で設定していた30名をお迎えすることができ非常によかったです.
スタッフ写真
閉会後スタッフとPanda,URのコラボ写真を撮影しました.

おわりに
今年のWorld MoveIt Dayの日本開催では,Masterブランチへマージされるようなすばらしい成果を出してくださった参加者さんもいらっしゃいました.だんだんと日本でもMoveItを使う側から開発側に入り込めるように推進活動をしたいと思っています.参加者の皆さん,ありがとうございました! 今年参加してくださった方も,参加できなかった方も,来年お会いしましょう!
ryo.kabutan editor
コメントを投稿するにはログインしてください。
著者について