MoveIt2のビルドとマニピュレータ「MARA」による動作確認(WMD 2019 in Tokyo 準備編)
0. はじめに
1. 環境
ubuntu 18.04,ROS2 Dashingを使用します.本記事ではROS2はインストール済みであるとして進めます.ROS2の環境構築ができていない方はこちらを元に先に環境構築を行ってください.
2. MoveIt2のコンパイル
MoveIt2をコンパイルするために,以下のパッケージをインストールする必要があります.
- geometry2
- geometric_shapes
- eigen_stl_containers
- object_recognition_msgs
- octomap_msgs
- random_numbers
- srdfdom
- urdf_parser_py
- octomap
以下,MoveIt2本体のcloneと依存パッケージの取得方法について記述します.
今回ワークスペースとして使用するディレクトリを作成し,MoveIt2本体をcloneします.
mkdir -p ~/moveit2/src git clone https://github.com/AcutronicRobotics/moveit2 -b master
MoveIt2をコンパイルするために必要な依存パッケージを取得します.
cd ~/moveit2 vcs import src < src/moveit2/moveit2/repos
この時点でcontrol_msgsというパッケージがcloneされてきますが,これをそのまま使用してコンパイルすると失敗してしまったため,こちらは消して,バイナリをインストールします.
rm -rf ~/moveit2/src/control_msgs sudo apt install ros-dashing-control-msgs
以下でMoveIt2と依存パッケージをコンパイルします.エラーが起きなければ成功です.
source /opt/ros/dashing/setup.bash colcon build --merge-install
3. MARAを用いたMoveIt2の動作確認
本節ではAcutronicRobotics社が提供するマニピュレータ「MARA」を元に,MoveIt2の動作確認を行います.
MARA自体はROS2対応がされており,Gazebo上で動作確認をすることができます.レポジトリはこちらになります.
3.1 MARA ROS2パッケージのコンパイル
MARA ROS2パッケージをコンパイルするにあたり,以下で依存パッケージを取得します.
cd ~/moveit2/ wget https://raw.githubusercontent.com/AcutronicRobotics/MARA/dashing/mara-ros2.repos vcs import src < mara-ros2.repos
またMoveIt2チュートリアル用のパッケージをcloneします.
cd ~/moveit2/src git clone https://github.com/RyuYamamoto/mara_moveit_tutorials -b wmd_dashing
cd ~/moveit2 && colcon build --merge-install
3.2 Gym Gazebo2のインストール
Gazebo上でMaraを扱うために,gym-gazebo2というパッケージをインストールする必要があります.レポジトリはこちらになります.
ちなみにこのパッケージはROS2及びGazebo上で強化学習などのアルゴリズムを検証するためのパッケージになっています.
cd ~/moveit2 wget https://raw.githubusercontent.com/AcutronicRobotics/gym-gazebo2/dashing/provision/additional-repos.repos vcs import src < additional-repos.repos cd ~ && git clone -b dashing https://github.com/AcutronicRobotics/gym-gazebo2 cd ~/gym-gazebo2 && pip3 install -e .
Gazebo起動時にgymがimportエラーで落ちて起動できないため,OpenAI Gymをインストールされていない方はそちらもインストールしてください.
今回は最新版を使用したいためソースコードからインストールします.
git clone https://github.com/openai/gym cd gym && pip3 install -e .
3.3 動作確認
無事に環境が構築できたら実際に起動して動作を確認してみます.
まずはじめにGazeboを起動します.
ros2 launch mara_gazebo mara.launch.py
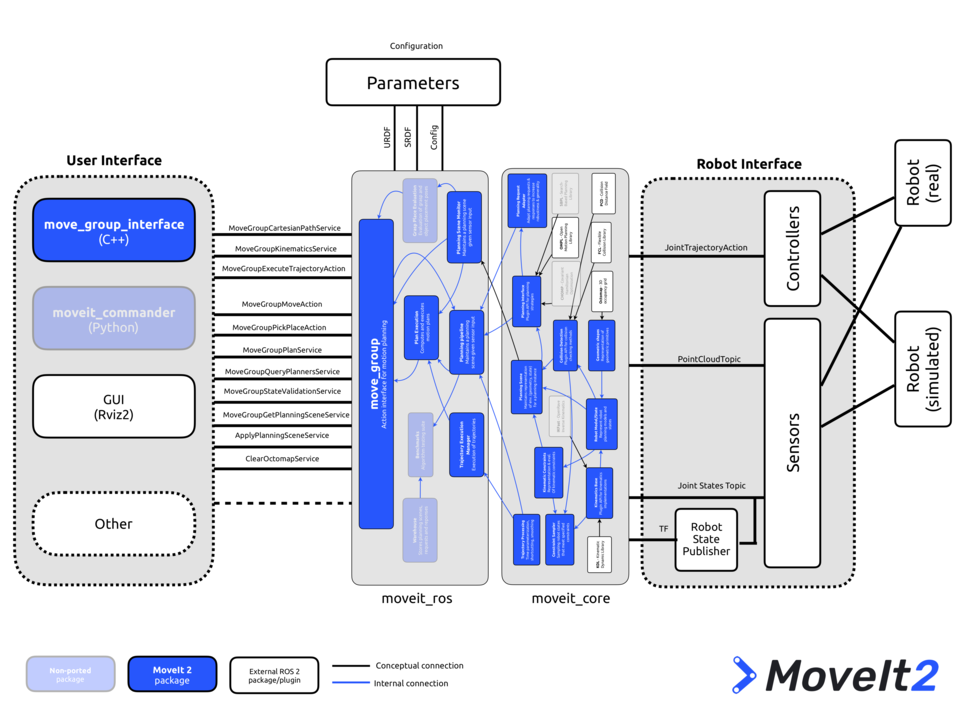
次にmove_groupを立ち上げます.こちらを立ち上げることでMoveItの独立した各モジュールを呼び出して統合し,またユーザーインターフェース側とロボットインターフェース側を繋ぎます.MoveIt1と大きな違いはありません.
ros2 run moveit_ros_move_group move_group
続いてmove_groupに対してプランニングに必要なパラメータを渡すためのlaunchファイルを起動します.
ここで渡すのはロボットのurdfファイルとmoveit_setup_assistantで生成されるsrdfファイルです.urdfはrobot_state_publisherに,srdfはtest_publish_dummy_joint_statesというノードに渡されます.srdfですが,各自の環境でmoveit_setup_assistantにより生成しても良いですが,こちらのレポジトリにmoveit_configがありますので,config内にあるものを使用すると良いと思います.
ros2 launch move_group_interface test_app.launch.py
立ち上げたあとにmove_groupが立ち上がっているターミナルでyou can start planning nowとでていれば成功です.
最後にmove_group_interfaceノードを立ち上げます.こちらのノードはユーザーインターフェース側となり,move_group_interface(C++)を用いて目標姿勢を設定し,プランニングとプランニング結果の実行指令をMoveIt側に送ります.(ちなみに,move_commander(Python)とRvizプラグイン(GUI)はまだROS2対応されていないため,プランニング結果の可視化は出来ません).
ros2 run move_group_interface move_group_interface
Gazebo上のロボットがプランニング結果に基づき動作すれば成功です.
move_group_interfaceノードの中身のコードについて軽く解説します.
まず以下でMoveGroupクラスのコンストラクタを宣言します.事前に設定したplanning_groupを指定することでMoveGroupの登録を行います.
moveit::planning_interface::MoveGroupInterface::Options options(PLANNING_GROUP, "robot_description", node);
moveit::planning_interface::MoveGroupInterface move_group(options);
MoveGroupに対して目標姿勢を渡すには以下のようにします.
geometry_msgs::msg::Pose target_pose1;
target_pose1.orientation.w = 0.5;
target_pose1.orientation.x = -0.5;
target_pose1.orientation.y = -0.5;
target_pose1.orientation.z = -0.5;
target_pose1.position.x = -0.039;
target_pose1.position.y = -0.156;
target_pose1.position.z = 1.5;
move_group.setPoseTarget(target_pose1);
以下でプランニングとプランニング結果を実行します.
moveit::planning_interface::MoveGroupInterface::Plan my_plan; move_group.plan(my_plan); move_group.execute(my_plan);
最後に
YamamotoRyu editor
コメントを投稿するにはログインしてください。
著者について