MoveItでPandaを動かそう:後編(WMD 2019 in Tokyo 準備編)
はじめに
本記事では,World MoveIt Day 2019 in Tokyo(WMD 2019 in Tokyo) の会場にて動かすことのできるロボットアーム Panda を,実際にPCと接続して動かす方法を紹介します.
後編では,Panda のパッケージ群である franka_ros の中身について紹介します.
当日実際に機体を動かしてみたい方は,必見です!
Panda を動かすPCの環境構築と,PCと実機の接続方法を説明した前編はこちらになります.
MoveItでPandaを動かそう:前編(WMD 2019 in Tokyo 準備編)
1. franka_ros の構成
franka_ros は,libfranka を ROS1 に対応させたパッケージ群です.
構成は次の図のようになっています.
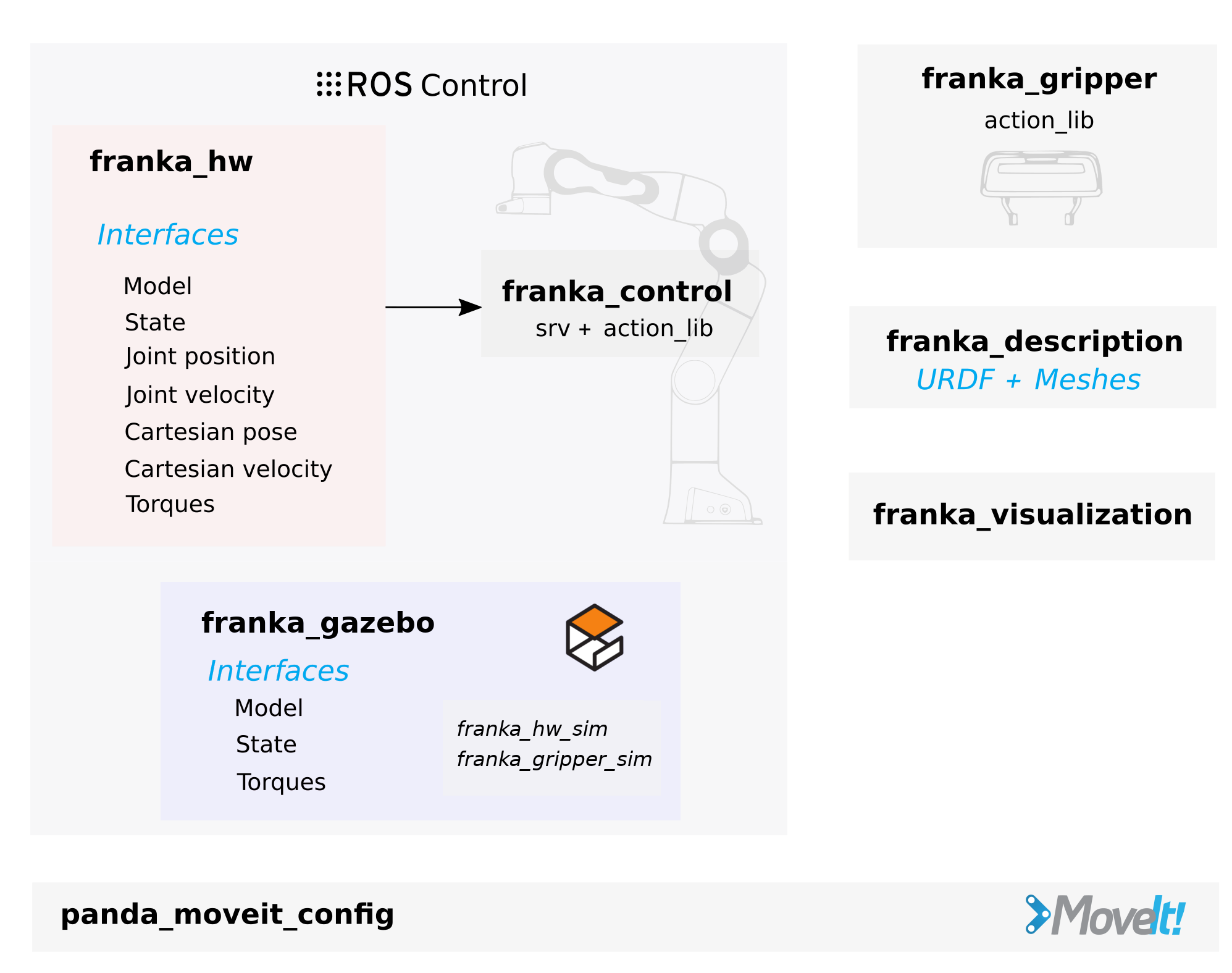 ※ panda_moveit_config は別パッケージです.
※ panda_moveit_config は別パッケージです.
1.1. franka_description
franka_description は Panda のロボットモデル (urdf xacro) を提供する ROS パッケージです.
RViz や MoveIt,Gazebo 等と連携することで,運動学計算や動力学計算,描画やプランニングなどを可能にします.
1.2. franka_gripper
franka_gripper は Panda のグリッパのインターフェースの役割を担う ROS パッケージです.franka_gripper_node という名前のノードとして実装されています.
このノードは,グリッパの状態を publish するほか,下記の actions server に従ってグリッパを制御します.
franka_gripper::MoveAction(width, speed):
目標グリッパ幅widthに,速度speedで動きます.franka_gripper::GraspAction(width, epsilon_inner, epsilon_outer, speed, force):
目標グリッパ幅widthにおいて,力forceで物を掴むようにします.目標グリッパ幅へは,速度speedで動作します.epsilon_inner,epsilon_outerはそれぞれ内側,外側へのグリッパ幅の許容誤差を表し,この許容誤差の中で収まった場合,成功と判定します.franka_gripper::HomingAction():
グリッパを元の状態に戻します.franka_gripper::StopAction():
現在実行中の action を中断します.力制御モードの場合は,脱力もします.control_msgs::GripperCommandAction(width, max_effort):
MoveIt 標準の指令です.
次のコマンドでノードを実行できます.
<fci-ip>には,コントローラのIPアドレス(前編での設定では 172.16.0.2)を入れてください.
roslaunch franka_gripper franka_gripper.launch robot_ip:=<fci-ip>
1.3. franka_hw
franka_hw は libfranka の制御 API をベースにした,制御インターフェースのパッケージです.
ハードウェアインターフェースのクラスである franka_hw::FrankaHWは,次のインターフェースをサポートしています.
hardware_interface::JointStateInterface:
関節毎に,JointState を取得する.hardware_interface::VelocityJointInterface:
関節毎に,JointState を取得しつつ,回転速度の指令で動かす.hardware_interface::PositionJointInterface:
関節毎に,JointState を取得しつつ,角度(位置)指令で動かす.hardware_interface::EffortJointInterface:
関節毎に,JointState を取得しつつ,トルク指令で動かす.franka_hw::FrankaStateInterface:
ロボットの全関節のJointState を取得する.franka_hw::FrankaPoseCartesianInterface:
ロボットの全関節のJointState を取得しつつ,手先位置の指令で動かす.franka_hw::FrankaVelocityCartesianInterface:
ロボットの全関節のJointState を取得しつつ,手先速度の指令で動かす.franka_hw::FrankaModelInterface:
ロボットの運動学モデル・動力学モデルを取得する.
hardware_interfaceを利用する場合は,<arm_id>_joint1, … , <arm_id>_joint7といったように,ジョイントの名前を指定する必要があります.
一方,franka_hwを利用する場合は,<arm_id>_robotのようにロボット名を一度指定すればよいです.
デフォルトでは,<arm_id>はpandaに設定されています.
また,ここでは解説しませんが,franka_hwには,
- 動作開始
- 動作中断
- 制御インターフェースの切り替え
といった,便利な API も用意されています.
1.4. franka_control
franka_control は libfranka の API を ROS 上で最大限利用するためのパッケージです.次のような機能が提供されています.
franka_control::SetJointImpedance:
ロボットの内部コントローラによる各関節のインピーダンスを設定します.franka_control::SetCartesianImpedance:
ロボットの内部コントローラによる手先のインピーダンスを設定します.franka_control::SetEEFrame:
エンドエフェクタ と link8 の相対座標を指定します.franka_control::SetKFrame:
あるリンクとエンドエフェクタの相対座標を指定します.franka_control::SetForceTorqueCollisionBehavior:
加わった手先外力が,剛体の衝突によるものだと判断する際の閾値を設定します.franka_control::SetFullCollisionBehavior:
上記に加え,各リンク単位での衝突判定の判断のための閾値を設定します.franka_control::SetLoad:
把持対象の重さなど,補償に使うための負荷を設定します.
franka_control::ErrorRecoveryAction は,エラー状態からの復帰を可能にします.
トピックを利用した簡単な復帰が可能です.
rostopic pub -1 /franka_control/error_recovery/goal franka_control/ErrorRecoveryActionGoal "{}"
復帰後,franka_control_node が動作している場合は,ロボットのコントローラを自動的に再起動させます.
ノードの立ち上げ方は次の通りです.
roslaunch franka_control franka_control.launch robot_ip:=<fci-ip> load_gripper:=<true|false>
この launch は franka_control_node だけでなく, franka_control::FrankaStateController も起動させます.
これはロボットの状態や推定手先外力など,RViz 上での可視化に必要な情報を読み取り,topic として publish します.(※ 描画の際には,RViz だけでなく,robot_state_publisher の立ち上げが必要です.)
1.5. franka_visualization
franka_visualization はロボット(グリッパを含む)の状態を RViz 上で可視化するためのパッケージです.
次のコマンドで起動できます.
roslaunch franka_visualization franka_visualization.launch robot_ip:=<fci-ip> \
load_gripper:=<true|false>
このパッケージは可視化をするだけで,ロボットを実際に動かすことはできません.
また,単一の franka::Robot のみが実際にロボットと接続できることに注意が必要です.複数の franka_joint_state_publisher は共存できないため,注意してください.
1.6. franka_example_controllers
franka_example_controllers は franka_hw::FrankaHW を利用した ROS コントローラの実装例です.
例えば,各関節をインピーダンス制御する例は,
roslaunch franka_example_controllers joint_impedance_example_controller.launch \
robot_ip:=<fci-ip> load_gripper:=<true|false>
で起動できます.
この launch では,描画も同時に起動するようになっています.
World MoveIt Day のハッカソンで実際に機体を動かしたい場合は,このパッケージを改造するのが便利かもしれません.
1.7. panda_moveit_config
panda_moveit_config は,Panda で MoveIt を使うために必要な設定ファイルが格納されています.
次のコマンドで立ち上がります.
roslaunch panda_moveit_config panda_control_moveit_rviz.launch load_gripper:=<true|false> \ robot_ip:=<fci-ip>
このパッケージの詳細な説明は,MoveIt のチュートリアル(英語)で行われています.また現在,このチュートリアルを日本語訳する作業が始まっています.
2. ROS コントローラを自作する
2.1. 継承クラス
franka_example_controllers の中に実装されている例は全て,controller_interface::MultiInterfaceControllerクラスを継承しています.
このクラスは,最大4種類のインターフェースを1つのコントローラに集約させることができます.
class NameOfYourControllerClass : controller_interface::MultiInterfaceController <
my_mandatory_first_interface,
my_possible_second_interface,
my_possible_third_interface,
my_possible_fourth_interface> {
bool init (hardware_interface::RobotHW* hw, ros::NodeHandle& nh); // mandatory
void update (const ros::Time& time, const ros::Duration& period); // mandatory
void starting (const ros::Time& time) // optional
void stopping (const ros::Time& time); // optional
...
}
franka_hw::FrankaHW において利用可能なインターフェースの組み合わせは,次の通りです.
- 1種類の単独利用
EffortJointInterface+PositionJointInterfaceEffortJointInterface+VelocityJointInterfaceEffortJointInterface+FrankaCartesianPoseInterfaceEffortJointInterface+FrankaCartesianVelocityInterface
また,init 関数と update 関数は必ず定義しなければなりません.
更にオプションで,starting関数と stopping 関数を定義できます.
init 関数はコントローラの読み込み時にしか呼ばれませんが, starting関数は再起動が発生した場合でも呼び出されます.
初期姿勢などの代入は starting関数内で行うのが良いでしょう.
もし速度制御のインターフェースを利用している場合は,安全のため,stopping 関数で目標速度をゼロにする必要があります.
2.2. コントローラのエクスポート
作成したコントローラのクラスは,pluginlib を用いてエクスポートする必要があります.
C++ソースファイルの末尾に,次のようなコードを加えてください.
#include <pluginlib/class_list_macros.h> // Implementation .. PLUGINLIB_EXPORT_CLASS(name_of_your_controller_package::NameOfYourControllerClass, controller_interface::ControllerBase)
更に,クラスのエクスポートのために,次のように plugin.xml を記述する必要があります.
<library path="lib/lib<name_of_your_controller_library>"> <class name="name_of_your_controller_package/NameOfYourControllerClass" type="name_of_your_controller_package::NameOfYourControllerClass" base_class_type="controller_interface::ControllerBase"> <description> Some text to describe what your controller is doing </description> </class> </library>
catkin にエクスポートさせるため,package.xml には,以下を書き足してください.
<export> <controller_interface plugin="${prefix}/plugin.xml"/> </export>
そして,コントローラを起動する際には,パラメーターサーバへの登録が必要です.
yaml ファイルに,次のようなパラメータを記述しておくと便利です.
your_custom_controller_name: type: name_of_your_controller_package/NameOfYourControllerClass additional_example_parameter: 0.0 # ..
これで,自作したコントローラを使う準備が整いました.
controller_spawner や hardware_manager を利用してコントローラを起動できます.
参考までになりますが,controller_spawner と franka_control_node は同じ名前空間で動作することに注意しましょう.
おわりに
この記事では,前編・後編を通じて,実際に Panda を動かす準備を解説しました.
World MoveIt Day 2019 in Tokyo では,Panda が会場に用意されています.ハッカソンでロボットアームを実際に動かすことのできる貴重な機会を,是非とも有効活用していただけたらと思います.
参考リンク
yuki.onishi editor
コメントを投稿するにはログインしてください。
著者について