CIS ToF カメラセンサの ROS ドライバパッケージをリリースしました
新しい ROS パッケージ cis_camera( https://github.com/tork-a/cis_camera )をリリースしました.
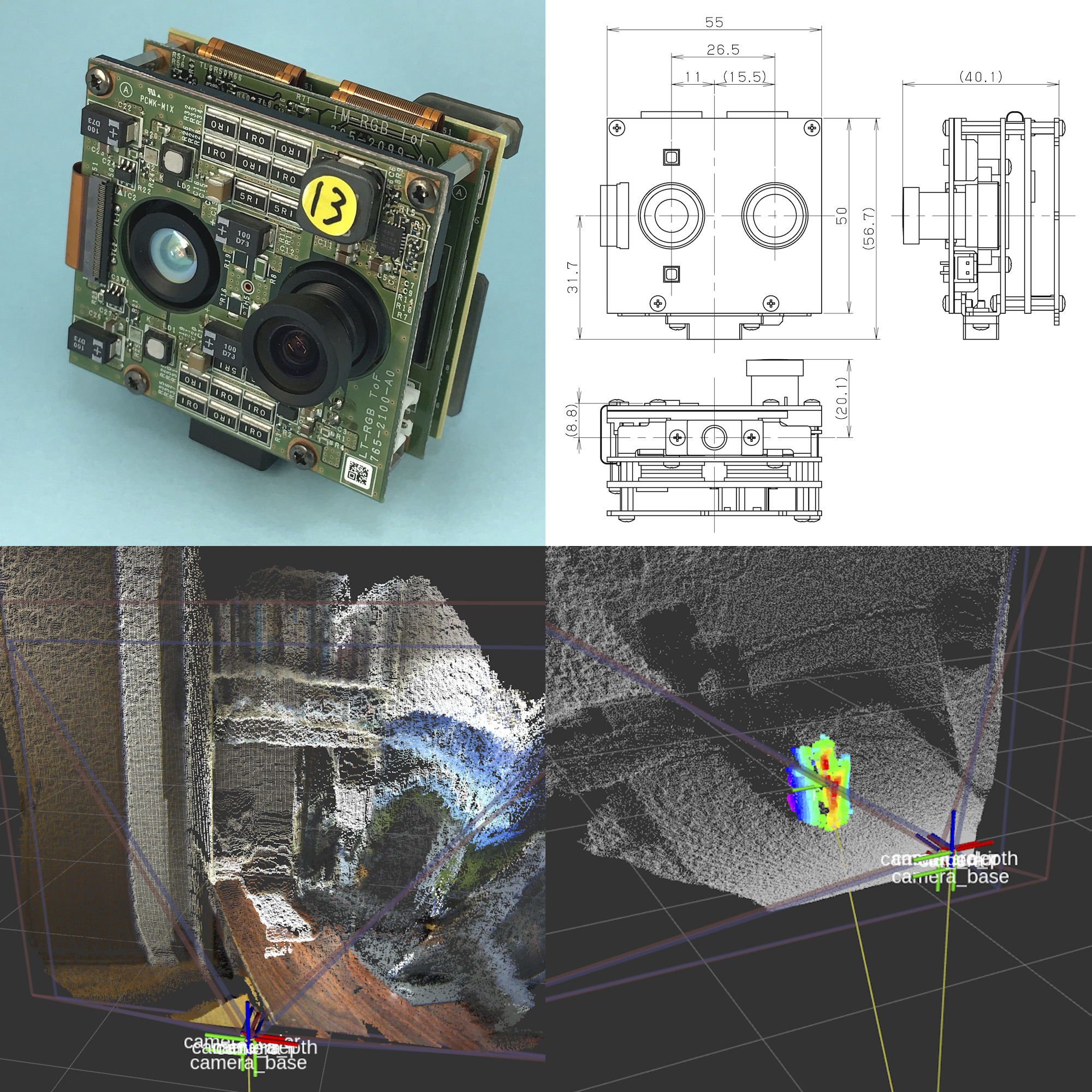
この ROS パッケージは 株式会社シーアイエス( https://www.ciscorp.co.jp/ ) ToF (Time of Flight) カメラセンサ DCC-RGBD1 のためのドライバパッケージです.
DCC-RGBD1 は小型ながら広いレンジの深度画像が取得可能な ToF カメラセンサ(ディベロップメントキット)です.
- 15cm 〜 5m のレンジで高精度な深度画像を取得可能
- 小型 H:50mm × W:55mm × D:35mm(突起部を含まず)
- RGB (QVGA) と Depth / IR (VGA) の3つの画像を同時取得
- インタフェースは USB 3.0( USB 3.0 micro B コネクタ搭載:USB 給電は非対応 )
- 屋内使用向け
本パッケージでは CIS ToF カメラセンサの ROS ドライバに加え,ノイズ除去,平面検出・除去,対象物点群抽出とフレーム座標算出のポイントクラウド処理ならびに,それらの処理結果を RViz で 3D 表示するためのサンプルプログラムおよび launch ファイルを同梱しています.
使い方は GitHub のドキュメントをご参照ください.
もし問題にぶつかった場合は GitHub Issues で報告をお願いします.
- GitHub サイト(含: クイックスタート)
- GitHub ドキュメント
- GitHub ドキュメント(PDFファイル)
- GitHub Issues
CIS ToF カメラセンサのハードウェアの入手などに関するお問い合わせは下記連絡先までお願いします.
ハードウェアに関するお問合せ先:株式会社シーアイエス 営業担当
メールアドレス:newbiz@ciscorp.co.jp
電話番号:042-664-5568
yamamoto.yosuke administrator
コメントを投稿するにはログインしてください。
著者について