
光近接センサモジュール WrPPS Single Board ネット販売開始
以前当ブログで紹介しました 光近接センサモジュール WrPPS Single Board をクリエイターズマーケット BOOTH に出品し,ネットワークショッピングで購入できるようになりました.
BOOTH での販売価格は 1回路 税込み 7,700円 と送料 185円 です.日本郵便のクリックポストでお届けします.
光近接センサモジュール WrPPS Single Board 販売開始
東京オープンソースロボティクス協会は 光近接センサモジュール WrPPS Single Board を税込価格 7,700円 で販売を開始しました.
- WrPPS: Wide-range Precise Proximity Sensor = 広範囲精密近接覚センサ
デュアルセンサによる近接〜中距離の連続的計測
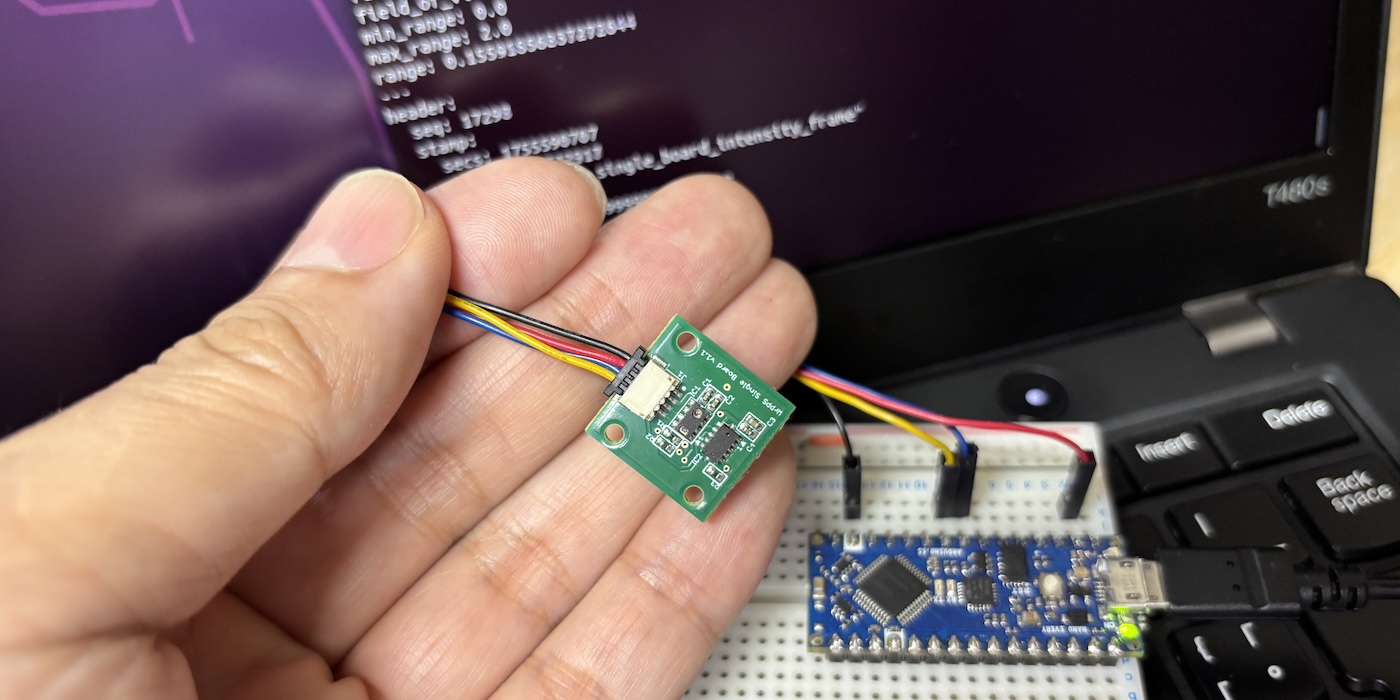
ToF:Time-of-Flight 光距離センサ(VL53L0X) と IR 反射強度(VCNL4040)近接センサを同一の小型基板に搭載し,2種のセンサ情報を統合的に利用するキャリブレーション機能を実装したドライバソフトウェア wrpps_ros https://github.com/tork-a/wrpps_ros を利用することで広範囲で高精度な近接覚センシングが可能になっています.
WrPPS Single Board がデュアルセンサ方式を採用している背景として,ToF 光距離センサはその特性上ごく近距離では計測困難な領域が生じます.一方,反射強度近接センサは近距離に強い反面,色や材質の影響を受けやすい性質があります.
これらのセンサ各特性に対して WrPPS Single Board と wrpps_ros ではこれら 2種 のセンサレンジが重なる距離に対象物があるときに ToF 光距離センサ計測値から反射強度近接センサの計測値をキャリブレーションして距離を算出・統合することで近接~中距離を連続的・頑健に計測しています.
WrPPS Single Board の特徴
- デュアルセンサ
- ToF 光距離センサ:ST VL53L0X( 最大約 2 [m] )
- 近接+周囲光完全一体型センサ:Vishay VCNL4040( 0 ~ 約 0.2 [m] )
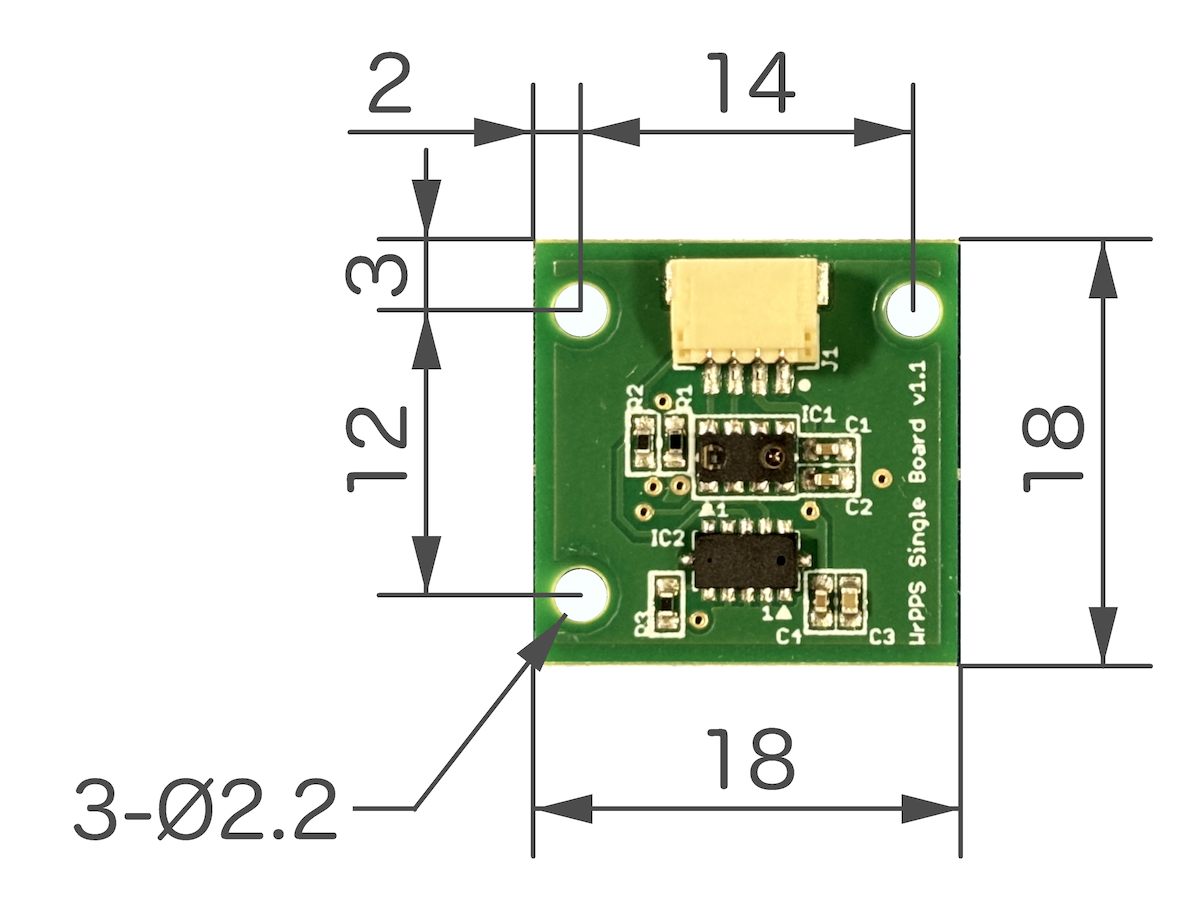
- 小型
- 基板サイズ:18 ✕ 18 ✕ 4.7 [mm]
- 重量:約 1.5 [g]
- 配線コネクタ
- JST SH(SM04B-SRSS)4ピン
- SparkFun Qwiic Connect System 準拠
- 市販の SH コネクタケーブルが利用可能
- Arduino ボードを使用して駆動
- 動作確認済み Arduino ボード
- Arduino UNO R4 Minima
- Arduino nano Every
- ROS 対応
- Ubuntu 20.04 + ROS Noetic
- ドライバソフトウェア:wrpps_ros https://github.com/tork-a/wrpps_ros
- OSS ライセンス:BSD-3-Clause
活用シーン
- 把持のプリコンタクト制御:対象に触れる直前まで高精度に計測
- 多種類対象物の近接検知:色・材質差の影響を抑えた近接距離判定
- 小型ロボットの安全接近:小型・軽量でエンドエフェクタや小型移動ロボットなどに搭載可能
- 柔軟な外装の接触検知:布などの柔軟な外装内側から変形を検知(ぬいぐるみロボットなど)
利用方法
ドライバソフトウェア wrpps_ros の利用方法は GitHub リポジトリの README に記載していますのでご参考ください.
- wrpps_ros README – GitHub
- https://github.com/tork-a/wrpps_ros#readme-ov-file
技術的な質問については wrpps_ros の Issues に投稿していただけるとありがたいです.
- wrpps_ros Issues – GitHub
- https://github.com/tork-a/wrpps_ros/issues
サンプル貸出
合計で 10個ほど を上限数として WrPPS Single Board のサンプル貸出しを行います.
- 主な貸出条件
- 1組織あたり1つ
- 貸出期間:1ヶ月(応相談)
- 貸出地域:日本国内
- 貸出品については研究・検証用途とし,商用利用の場合はご購入願います.
WrPPS Single Board のサンプル貸出しを希望される方は下記リンク先にある Google Form 上の「WrPPS Single Board 貸出申込フォーム兼同意書」に必要事項を記入して送信してください.弊社から返答のメールをお送りします.
- WrPPS Single Board 貸出申込フォーム兼同意書 – Google Form
- https://forms.gle/W4vbHDBQKuEyyhQe9
- 注)メールアドレスに誤りがないよう記入をおねがいいたします.
ご購入について
WrPPS Single Board 価格は 1回路あたり 7,700円(消費税込み)です.
当面は日本国内への販売(出張などでの日本国外一時持ち出し使用可)となっています.
WrPPS Single Board のご購入希望や各種お問い合わせは下記メールアドレスにお送りください.
- お問合せ先
- info@opensource-robotics.tokyo.jp
ご購入の流れはおおよそ次のとおりです.
- TORK 宛の上記メールにて購入の希望や検討の旨をお知らせください
- TORK より見積書の送付
- 発注
- 納品(送料無料)・納品書発行
- 請求書 PDF ファイルの送信
- 請求書にもとづいてお支払い
ご検討のほどよろしくお願いいたします.
<追記:2025年12月10日>
光近接センサモジュール WrPPS Single Board をクリエイターズマーケット BOOTH にてネットワークショッピングで購入できるようになりました.
- 光近接センサモジュール WrPPS Single Board – BOOTH
- https://tork.booth.pm/items/7743925
BOOTH での販売価格は 1回路 税込 7,700円 と送料 185円 です.
CIS ToF カメラセンサの ROS ドライバパッケージをリリースしました
新しい ROS パッケージ cis_camera( https://github.com/tork-a/cis_camera )をリリースしました.
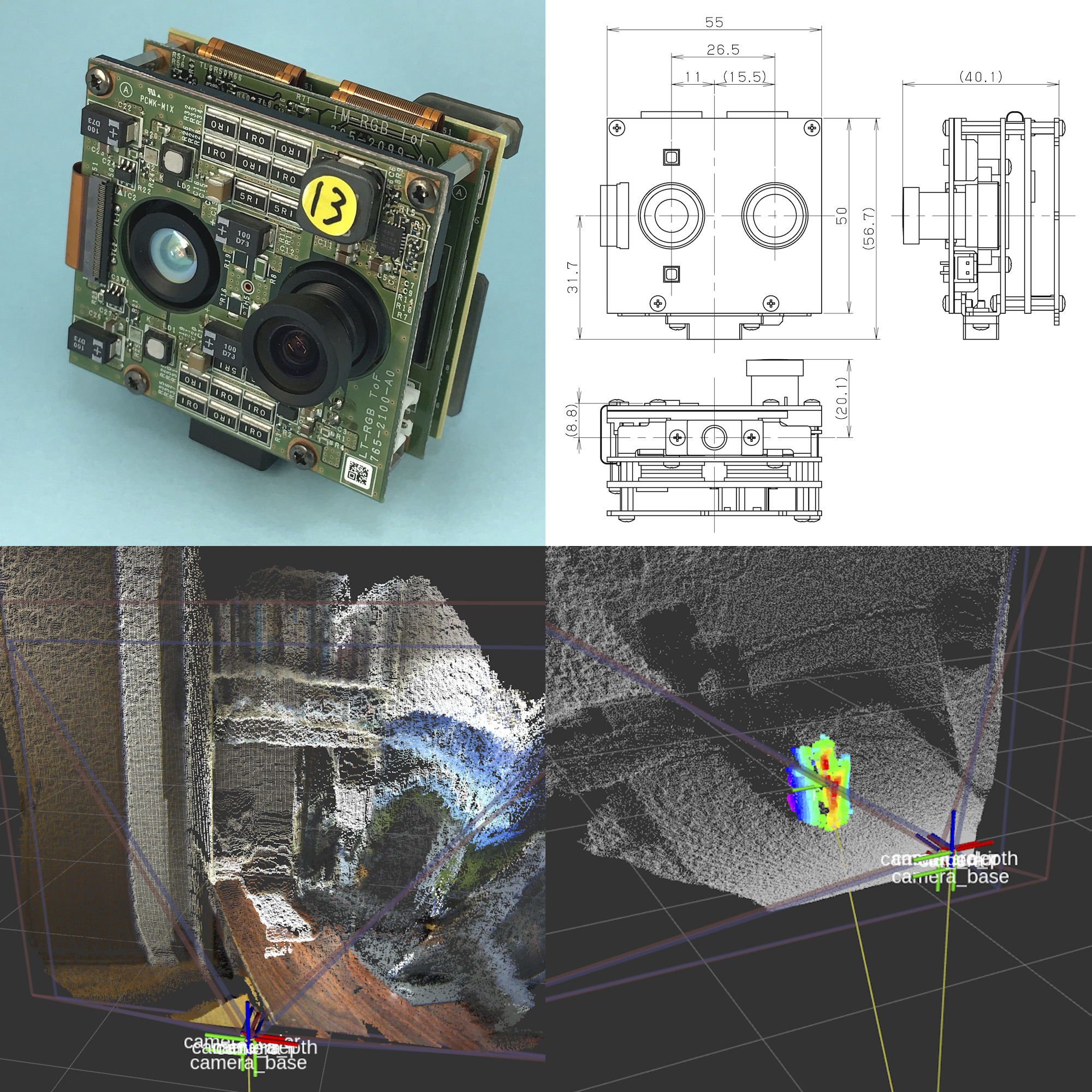
この ROS パッケージは 株式会社シーアイエス( https://www.ciscorp.co.jp/ ) ToF (Time of Flight) カメラセンサ DCC-RGBD1 のためのドライバパッケージです.
DCC-RGBD1 は小型ながら広いレンジの深度画像が取得可能な ToF カメラセンサ(ディベロップメントキット)です.
- 15cm 〜 5m のレンジで高精度な深度画像を取得可能
- 小型 H:50mm × W:55mm × D:35mm(突起部を含まず)
- RGB (QVGA) と Depth / IR (VGA) の3つの画像を同時取得
- インタフェースは USB 3.0( USB 3.0 micro B コネクタ搭載:USB 給電は非対応 )
- 屋内使用向け
本パッケージでは CIS ToF カメラセンサの ROS ドライバに加え,ノイズ除去,平面検出・除去,対象物点群抽出とフレーム座標算出のポイントクラウド処理ならびに,それらの処理結果を RViz で 3D 表示するためのサンプルプログラムおよび launch ファイルを同梱しています.
使い方は GitHub のドキュメントをご参照ください.
もし問題にぶつかった場合は GitHub Issues で報告をお願いします.
- GitHub サイト(含: クイックスタート)
- GitHub ドキュメント
- GitHub ドキュメント(PDFファイル)
- GitHub Issues
CIS ToF カメラセンサのハードウェアの入手などに関するお問い合わせは下記連絡先までお願いします.
ハードウェアに関するお問合せ先:株式会社シーアイエス 営業担当
メールアドレス:newbiz@ciscorp.co.jp
電話番号:042-664-5568