First MoveIt! Update in 2017. Using it on NEXTAGE pt.12017年始早々 MoveIt! 新バージョンがリリース.NEXTAGE で使ってみる その1
MoveIt! の最新バージョンが公開になりました.昨2016年にメンテナンスチームがリニューアルして以降,MoveIt! の開発が活発になり,それまで溜まっていた問題報告やパッチ候補の処理が加速しました.今日現在利用可能な ROS の3つの異なるディストリビューションそれぞれに最新版がリリースされています (Indigo 0.7.6, Jade 0.8.3, Kinetic 0.9.3).今回のリリースではバグ修正に加え,ユーザの要望の高かった機能も幾つも追加されています.その内の一つの機能をカワダロボティクス社の NEXTAGE Open のシミュレータを用いて見てみます.
1.軌道実行時の際の速度・加速度をの動的に変更
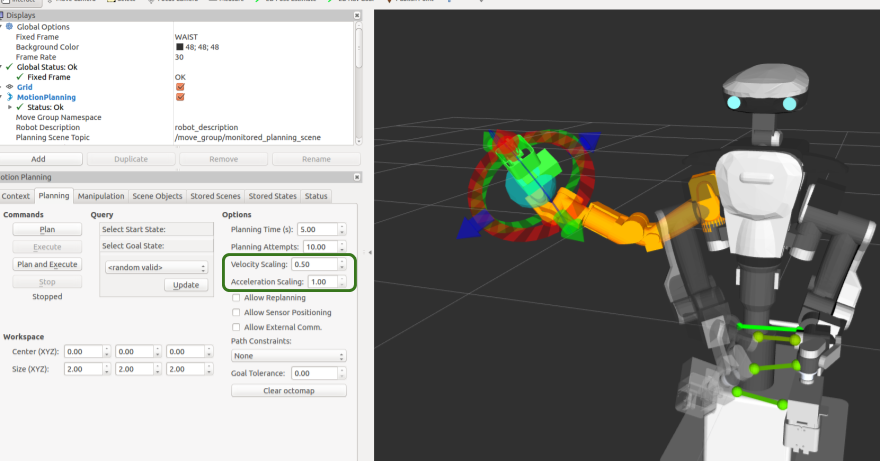
MoveIt! の RViz プラグイン上に新たな機能が追加されました.スピンボックス上の値を 0-1 の間で変更することでロボットアームの軌道実行の速度,加速度を変更できます.
御自身のロボットの3次元モデルファイル (URDF 或いは SRDF) 内に指定している関節速度/加速度を0-1の間でスケールすることができるようになっています.
New version of MoveIt! binary 0.7.6 is just released for ROS Indigo, first time in 2017 (for sure!) and first release since June 2016. This version comes with some long-wanted features (along with bug fixes of course) that we’re trying out using NEXTAGE simulator.
1. Changing trajectory velocity and acceleration during runtime
Changing the speed of the trajectory during runtime has been one of FAQs from NEXTAGE users who use MoveIt!, let alone many MoveIt! users on the globe. Now through MoveIt! RViz plugin you can conveniently configure that on the fly on the spinboxes added.
RViz 上でなくプログラマティックに変更したい場合は MotionPlanRequest トピックの値を変更することで runtime/プログラム実行中に変更できます.
次回に続く.
To configure that programmatically, see this tutorial that explains chainging MotionPlanRequest topic would do the work.
TORK is very actively contributing the development and maintenance of MoveIt!.
Isaac Saito subscriber
著者について