
テック技販フォースセンサロボット用アンプが ROS2 に対応しました!
東京オープンソースロボティクス協会は テック技販 社製フォースセンサロボット用アンプ DMA-03 for Robot の Linux / ROS2 ドライバソフトウェア tecgihan_driver の開発とリリースのお手伝いをしました.
ロボット用フォースセンサアンプ DMA-03 for Robot は 小型演算3CHひずみアンプ(デジタルタイプ)DMA-03 をロボットシステムに必要な実時間出力に対応させたものです.

2025年7月現在 tecgihan_driver が対応している Linux / ROS のバージョンは次のとおりです.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
ロボット用フォースセンサアンプ DMA-03 for Robot のドライバソフトウェアが ROS に対応したことで テック技販 社製の小型フォースセンサを容易にロボットシステムに組み込むことが可能となっています.また,計測されたデータを ROS の豊富なツールで活用することもできます.
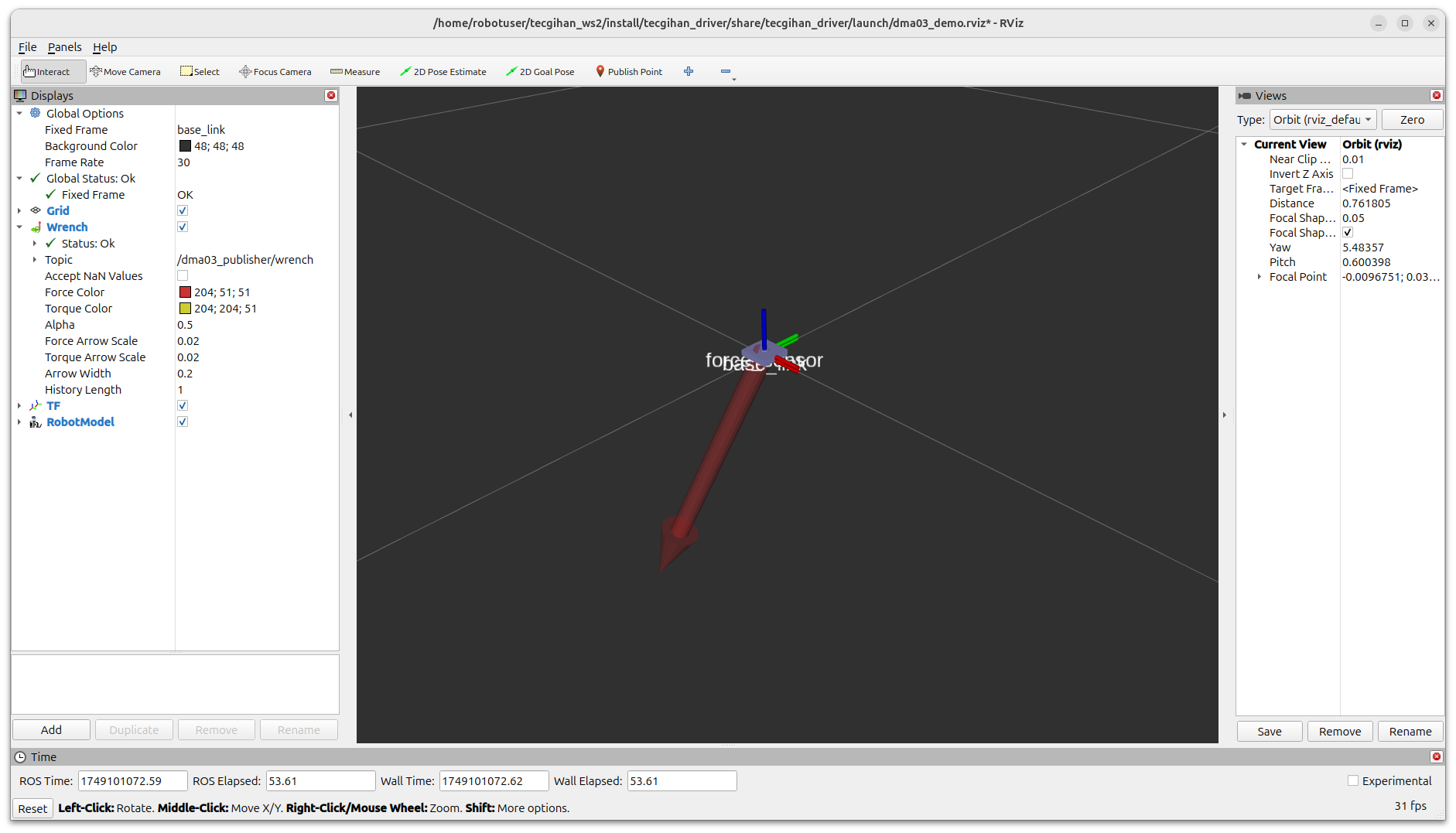
ROS ツール活用例1 – RViz で計測データを3次元視覚化表示
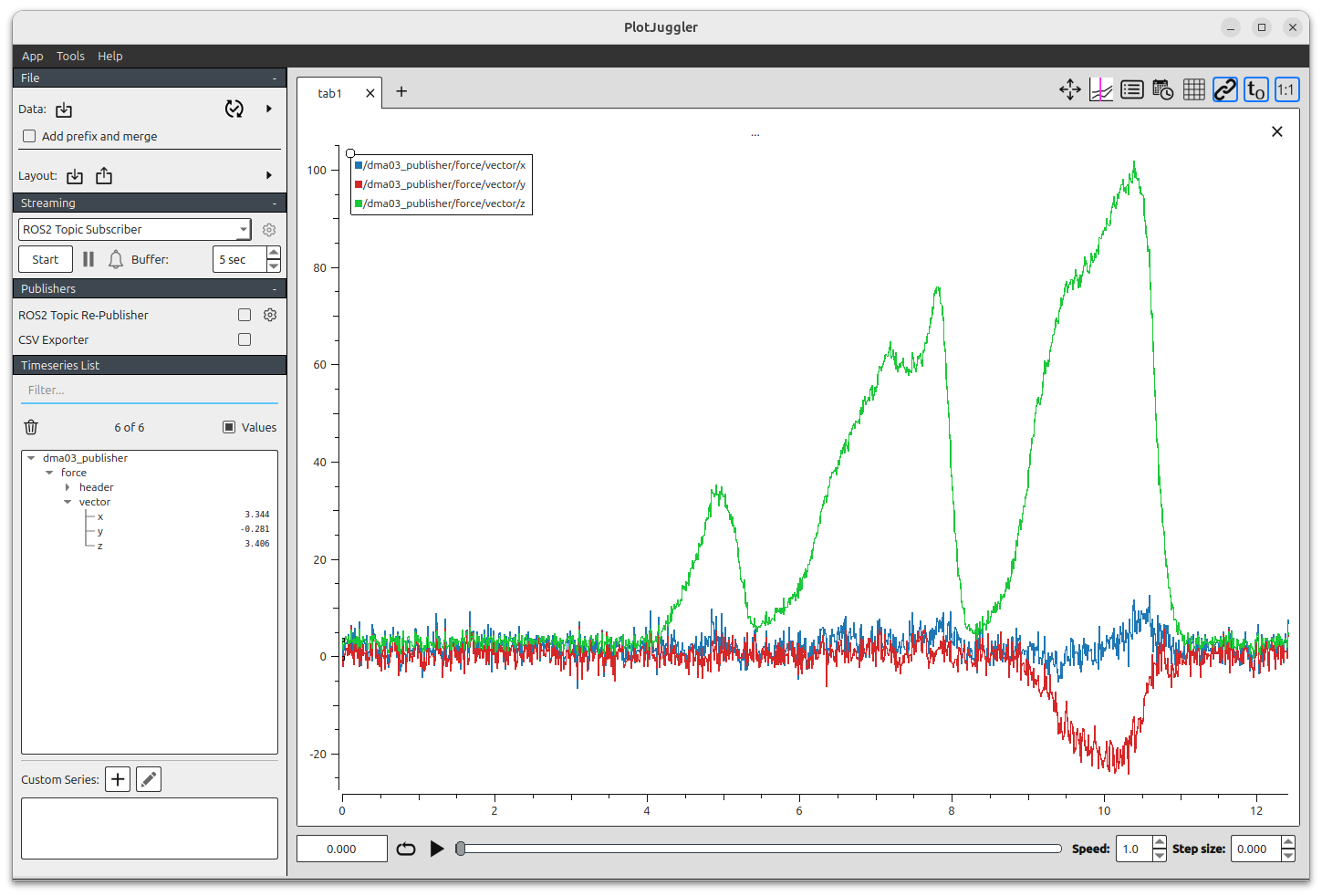
ROS ツール活用例2 – Rosbag2 でデータを保存し PlotJuggler でグラフ表示
ロボット用フォースセンサアンプ DMA-03 for Robot の Linux / ROS2 対応ドライバソフトウェアの詳しい説明や利用方法は GitHub tecgihan_driver リポジトリのトップページ にある README に日本語・英語併記で掲載しています.
tecgihan_driver に関する質問やサポートは GitHub tecgihan_driver サイトの Issues にて受け付けていますので気軽に投稿してください.

パソコン1台で出来るロボットの学習素材集
ROS(ロス/Robot Operating System)の学習は実際にロボットがなくてもロボットのシミュレータが入手できるのでネットワークにつながるパソコンが1台あればできますので結構自習に向いています.この記事では ROS の学習を始める,進めるにあたり必要な情報がある Web へのリンクを中心に紹介します.
大まかに言うと次のインストールを行えば ROS の学習をスタートすることができます.
- パソコンにオペレーティングシステムの Ubuntu Linux をインストール
- Ubuntu Linux に ROS をインストール
- ROS 上で動くロボットソフトウェアのインストール
- → 紹介 ROS チュートリアル内にて
ROS と Ubuntu Linux のバージョンは後述する ROS 学習のチュートリアルが現時点では ROS Kinetic というバージョンを基本としているので下記の組み合わせをお勧めします.
- Ubuntu 16.04
- ROS Kinetic
ROS Melodic は ROS Kinetic と基本的な操作のほとんどは変わらないので ROS Kinetic で学習してから ROS Melodic に移行しても難なく可能です.
パソコンへの Ubuntu Linux のインストール
パソコンはどのようなものを使えば良いのか?については下記記事を参考にしてください.
最新高性能パソコンよりも数年型落ちや廉価の機種のほうが Ubuntu Linux をインストールしやすい傾向にあるように思います.
Ubuntu Linux への ROS のインストール
下記リンク先に各 ROS のバージョンにおけるインストール手順が書かれています.
また,Ubuntu のバージョンと ROS のバージョンには1対1の対応関係があるので組み合わせを気をつける必要があります.
- ROS Kinetic → Ubuntu 16.04(記事執筆時の推奨)
- ROS Melodic → Ubuntu 18.04
ROS のチュートリアル
各チュートリアルを進めるとそれらの中で ROS シミュレータなどのインストールも行います.
TORK MoveIt チュートリアル
ROS の入門には TORK MoveIt チュートリアルをお薦めします.MoveIt は ROS のマニピュレーションロボット動作計画ソフトウェアです.このチュートリアルでは数種のロボットの ROS シミュレータのインストールや基本的な操作,プログラムでのロボット操作を学習することができます.TORK MoveIt チュートリアルではプログラミング言語に Python を用いていますが,プログラミングの経験がほとんどない人にもプログラムによるロボット操作の体験と学習ができるように構成しています.
- TORK MoveIt チュートリアル
ROS を初めて使う方に TORK MoveIt チュートリアルを学習したときのレポートも下記の記事に書いてもらっています.学習過程でいろいろと疑問をもった点などの体験を書いてもらいましたので参考にしてみてください.
ROS-Industrial トレーニング(日本語版)
より発展的な ROS プログラミングを学習したい場合は ROS-Industrial トレーニングを行ってみるのも良いでしょう.この教材で取り上げられているプログラミング言語は主に C++ と Python です.C++ によるロボット制御や画像処理,3D ポイントクラウド処理などとそれらの組み合わせのプログラムの学習ができます.
ROS で質問したいことが出てきたら
ROS Discourse やチュートリアル,パッケージの GitHub Issues に質問を投稿してみてください.
入門的な実機マニピュレーションロボット
1台のパソコンだけ,シミュレータだけでなく入門的な実機マニピュレータを利用してみたいと思った方は入門的なマニピュレーションロボット2例の導入検証を行った記事を参考にしてみてください.